一种海上人员漂移轨迹预测方法
本发明属于漂移轨迹预测领域,具体涉及一种海上人员漂移轨迹预测方法。
背景技术:
1、随着海上生产活动的增多,人员落水事件频发。通过对海上人员位置的动态监测,能够降低落水事件报警的滞后性,提高落水人员救援的及时性,增强海上生产的安全性。目前海上人员位置监测采用佩戴示位终端的方式,当人员落水后利用卫星定位系统定时发送漂移位置,实现监测漂移轨迹的目的,为后方救援提供信息支持,提高搜救效率。在落水人员海上漂移过程中,示位标卫星定位模块易受海上天气状况、人员落水姿态、示位标佩戴位置等因素的影响,接收到的卫星信号容易出现延迟甚至中断的情况,无法及时发送精确地位置信息,导致后方接收落水人员位置信息误差较大甚至失联,影响救援效率、增加救援工作难度,造成严重的生命财产损失。
2、近年来,研究人员开展了大量海上人员漂移轨迹预测研究。以概率统计方法为主的漂移估计预测研究,利用大量的实验数据,建立运动学相关方程进行漂移轨迹预测。这类方法非线性能力预测有限,在具有明显的非线性时序特征的海上人员漂移轨迹研究中的预测精度较低。
3、深度学习的方法能够提取特征并自动关注上下文信息,具有更好的数据拟合和预测性能,在处理非线性时间序列问题上取得了较好的预测精度。目前利用深度学习方法进行海上目标漂移物轨迹预测算法研究的对象多为船只、浮标以及auv等。海上目标漂移物种类不同,考虑的外部影响因素以及海上漂移特性也不相同,已有算法在海上人员漂移轨迹预测领域的预测效果难以满足需求。实验研究表明,海上人员漂移轨迹主要受到海风,海流以及波浪的影响,当落水目标长度小于50m相对于海浪波长较小时,可以忽略波浪对落水目标的影响。因此对于海上落水人员而言,漂移轨迹主要受到海风与海流两方面因素的影响。其中,海上漂移人员的落水姿态主要分为水平与垂直,在海风与海流相对稳定的前提下,海上漂移人员不同的落水姿态决定海风与海流对其影响的比例,导致漂移轨迹出现明显差异。
4、现有的海上目标漂移物轨迹预测算法主要分为多输入单输出与多输入多输出两种模式。多输入单输出模式将多个环境变量以及历史轨迹作为输入,将漂移距离作为输出,预测结果缺少漂移方向,难以满足落水人员位置监测的精确定位需要;多输入多输出模式融合参数的多维特征实现对人员轨迹的预测,预测结果为未来一段时间的位置经纬度,但是忽视了对重要特征以及关键时间的关注,导致算法的精度较低、实时性不高。
技术实现思路
1、针对现有技术中存在的上述技术问题,本发明提供一种海上人员漂移轨迹预测方法,设计合理,解决了现有技术的不足,具有良好的效果。
2、本发明采用如下技术方案:
3、一种海上人员漂移轨迹预测方法,包括以下步骤:
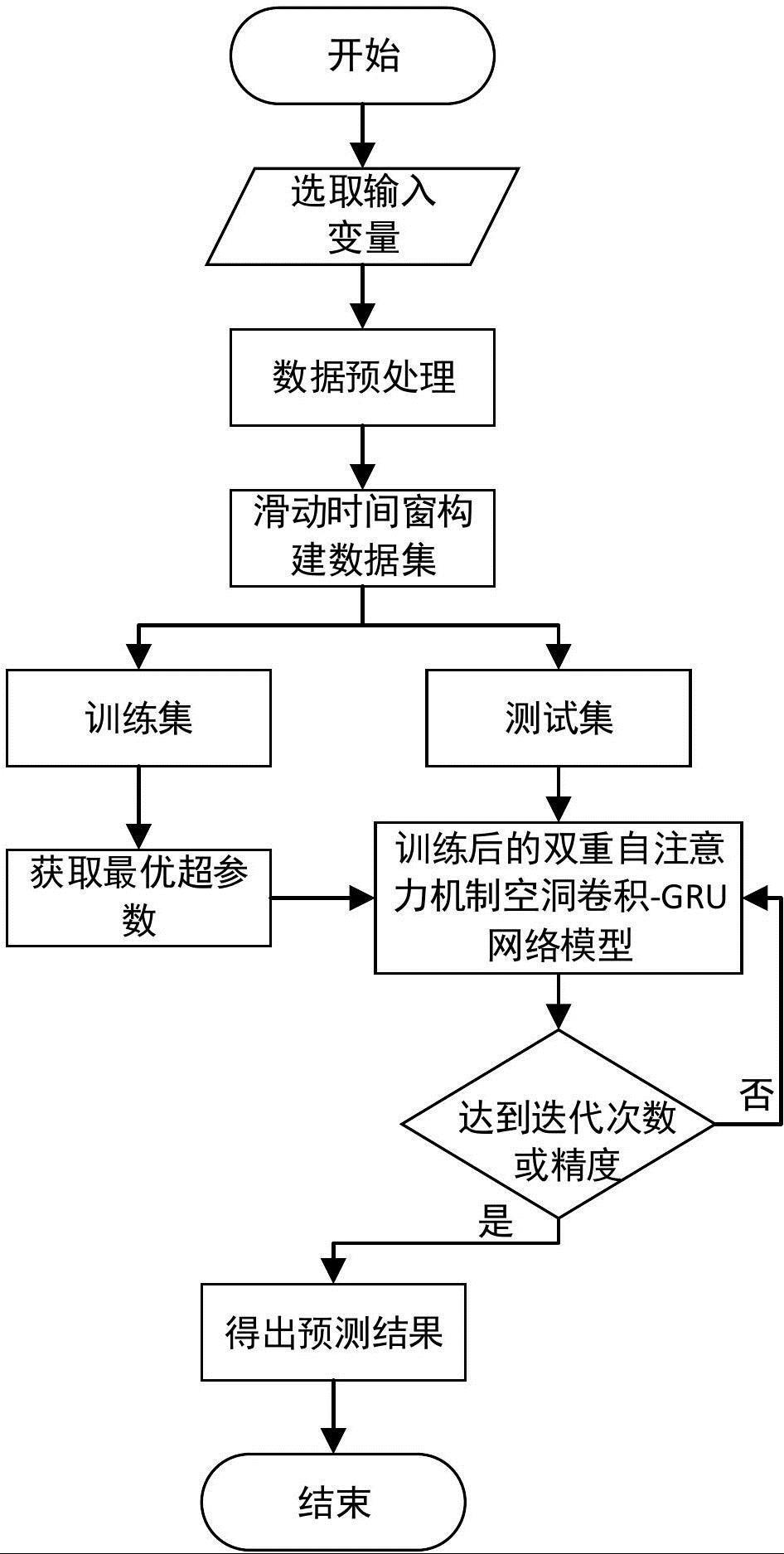
4、s1、获取海上人员漂移轨迹数据作为数据集,并对漂移轨迹数据进行预处理;
5、s2、基于预处理后的数据集构建关于时间序列的训练集和测试集;
6、s3、构建基于双重自注意力机制的空洞卷积-gru网络模型,其包括特征多头自注意力模块、空洞卷积网络模块、两层gru网络模块和时序自注意力模块,使用训练集训练该模型,使用测试集对训练好的基于双重自注意力机制的空洞卷积-gru网络模型进行验证;
7、s4、使用s3中训练好的基于双重自注意力机制的空洞卷积-gru网络模型预测海上人员未来时刻的漂移轨迹。
8、进一步地,所述s1中,所述漂移轨迹数据包括海风数据、海流数据以及历史轨迹数据,其中,海风数据分为海风经纬度坐标以及速度的东分量与北分量,海流数据分为海流经纬度坐标以及速度的东分量与北分量,历史轨迹数据包括经纬度坐标。
9、进一步地,所述s1中,预处理包括以下子步骤:
10、s1.1、对于数据集中缺失或异常数据,用该数据时间点前后的平均值进行填充和替换;
11、s1.2、针对数据集中出现时间间隔不统一的问题,采用线性插值法进行统一时间间隔;
12、s1.3、对数据进行归一化处理,其表达式为:
13、;
14、其中,为数据归一化后的值,为原始数据值,为数据集的最小值,为数据集的最大值。
15、进一步地,述s2包括以下子步骤:
16、s2.1、将数据集中的数据按监测时间先后顺序进行排序,按照8:2的比例划分为训练集和测试集;
17、s2.2、将训练集和测试集中的输入和输出变量的维度处理为三维,包括batch_size、time_step、input_size、output_size,其中batch_size为一次训练输入的环境变量与轨迹数据的数量,time_step为时间步长,input_size为输入的环境变量与轨迹数据数量,output_size为输出预测的轨迹数据数量。
18、进一步地,所述s3中,训练过程包括以下子步骤:
19、s3.1、确定输入层的数据,输入数据为海流经纬度坐标、海流速度东分量、海流速度北分量、海风经纬度坐标、海风速度东分量、海风速度北分量、历史轨迹经纬度坐标以及时序特征变量,构建大小为的输入特征矩阵,共有个特征,,个时刻,表示为:;
20、s3.2、将输入到特征多头自注意力模块中,得到特征多头自注意力模块的权重,其中,计算过程为:
21、;
22、;
23、;
24、;
25、;
26、;
27、<msub><mi>a</mi><mrow><mi>m</mi><mi>=</mi></mrow></msub><mi>multihead</mi><mrow><msub><mi>q</mi><mi>m</mi></msub><mi>,</mi><msub><mi>k</mi><mi>m</mi></msub><mi>,</mi><msub><mi>v</mi><mi>m</mi></msub></mrow></mfenced><mi>=[</mi><msub><mi>a</mi><mi>1,</mi></msub><msub><mi>a</mi><mi>2</mi></msub><mi>,</mi><mi>⋯</mi><mi>,</mi><msub><mi>a</mi><mi>k</mi></msub><mi>]</mi>;
28、其中,为查询矩阵;为键矩阵;为值矩阵;为缩放点积注意力函数;为的维度;为第组自注意力输出,;为查询矩阵的训练参数矩阵;为键矩阵待学习的参数矩阵、为值矩阵待学习的参数矩阵、为转换矩阵,将拼接的矩阵转换为指定长度的输出向量;
29、对输入特征矩阵x赋权,可得到输入特征加权矩阵;
30、s3.3、将输入到空洞卷积网络模块中,空洞卷积网络模块由三层扩张率不同的空洞卷积层构成,确定该模块的多个超参数,超参数包括卷积核大小、卷积核移动步长、填充大小、卷积核个数、三层空洞卷积层的扩张率大小;输出维度为[batch_size, channel,, ],其中,batch_size为批次,channel为通道数,为特征矩阵高度,为特征矩阵宽度;
31、该空洞卷积网络模型输出矩阵;
32、s3.4、将矩阵经过维度变换为,输入到两层gru网络模块中,确定两层gru网络模块的多个超参数,超参数包括隐藏层层数、隐藏层单元数、输出层层数、输出层单元数;具体步骤为:
33、<msub><mi>r</mi><mi>t</mi></msub><mi>=si</mi><mi>gmoid(</mi><msub><mi>w</mi><mi>r</mi></msub><mi>[</mi><msub><mi>x</mi><mi>t</mi></msub><mi>,</mi><msub><mi>h</mi><mi>t-1</mi></msub><mi>]+</mi><msub><mi>b</mi><mi>r</mi></msub><mi>)</mi>;
34、<msub><mi>z</mi><mi>t</mi></msub><mi>=</mi><mi>sigmoid(</mi><msub><mi>w</mi><mi>z</mi></msub><msub><mi>[x</mi><mi>t</mi></msub><mi>,</mi><msub><mi>h</mi><mi>t-1</mi></msub><mi>]+</mi><msub><mi>b</mi><mi>z</mi></msub><mi>)</mi>;
35、<mover><msub><mi>h</mi><mi>t</mi></msub><mo stretchy="true">̃</mo></mover><mi>=tanh(</mi><msub><mi>w</mi><mi>h</mi></msub><mi>[</mi><msub><mi>r</mi><mi>t</mi></msub><mi>⨀</mi><msub><mi>h</mi><mi>t-1</mi></msub><mi>,</mi><msub><mi>x</mi><mi>t</mi></msub><mi>]+</mi><msub><mi>b</mi><mi>h</mi></msub><mi>)</mi>;
36、;
37、其中,代表重置门的值,代表更新门的值,表示输入序列当前时间步的输入,代表上一个时间步的隐藏状态,表示当前时间步的候选隐藏状态,表示当前时间步的隐藏状态,表示重置门中的训练参数矩阵,表示更新门中的训练参数矩阵,表示当前时间步候选隐藏状态中的训练参数矩阵表示重置门中的偏置项,表示更新门中的偏置项,表示当前时间步候选隐藏状态中的偏置项,为哈达码积运算符;
38、s3.5、将各个时刻的隐藏层状态输入到时序自注意力模块中,具体步骤为:
39、;
40、;
41、;
42、其中,是训练参数矩阵,是偏置项,是时刻评分函数的输出值,是经过归一化之后的注意力概率得分,是时刻的注意力层的输出,将输入到全连接层得到预测结果;
43、s3.6、采用relu函数作为激活函数,使用mse作为损失函数,采用adam优化器对学习率进行优化,学习率为0.0001,隐藏层神经元数为64,训练网络直到模型收敛,获取最优超参数,从而获得训练好的双重自注意力的空洞卷积-gru网络模型。
44、与现有技术相比,本发明分析海上人员漂移轨迹特性,综合考虑预测方法以及计算耗时等方面,采用深度学习的方法,构建双重自注意力机制的空洞卷积-gru网络模型,充分提取轨迹特征,通过双重自注意力机制关注重要特征以及关键时刻对预测轨迹的影响,提高海上救援指挥和协调工作的效率与准确性,降低海上事故的生命财产损失。
- 还没有人留言评论。精彩留言会获得点赞!