SOP芯片管脚共面度检测方法及装置
本发明涉及芯片检测,尤其涉及一种sop芯片管脚共面度检测方法、一种sop芯片管脚共面度检测装置、一种电子设备及一种存储介质。
背景技术:
1、在集成电路中,sop(small out-line package,集成电路封装)是一种很常见的元件封装形式。sop芯片因具有外形小巧,灵活性强等特点而广泛应用于各类智能手机、平板电脑、数字化产品等电子领域,但在sop芯片生产制造过程中,由于制造工艺、材料、生产设备等因素影响,无法完全避免管脚出现断脚、缺脚、共面度、翘起度等缺陷,采用出现这类缺陷的芯片往往会导致后续贴装成品出现功能故障,甚至报废的问题。因此,sop芯片管脚检测在整个芯片外观检测中占比越来越重。
2、当前而言,多数企业针对sop芯片管脚检测通常采用传统人工目检以及工业2d(two dimensional,二维的)视觉检测方案,而由于工业2d检测中缺乏深度信息,若对芯片管脚共面度、翘起度等3d(three dimensions,三维的)指标进行检测,则往往容易存在如下问题:
3、(1)在进行检测时,需要对sop芯片进行三维重建,不仅过程复杂,且重建精度也会影响实际检测精度;
4、(2)在针对不同尺寸的sop芯片时,需要重新设计光路布局,导致检测柔性度低;
5、(3)由于是对sop芯片多个侧面同时进行成像,因此对光照条件要求高,易受到外界环境影响,成像效果差。
技术实现思路
1、本发明提供了一种sop芯片管脚共面度检测方法、一种sop芯片管脚共面度检测装置、一种电子设备及一种存储介质,用于解决或部分解决现有的sop芯片检测方法中存在的检测精度低、易受到外界环境影响导致成像效果差的技术问题。
2、本发明提供的一种sop芯片管脚共面度检测方法,所述方法包括:
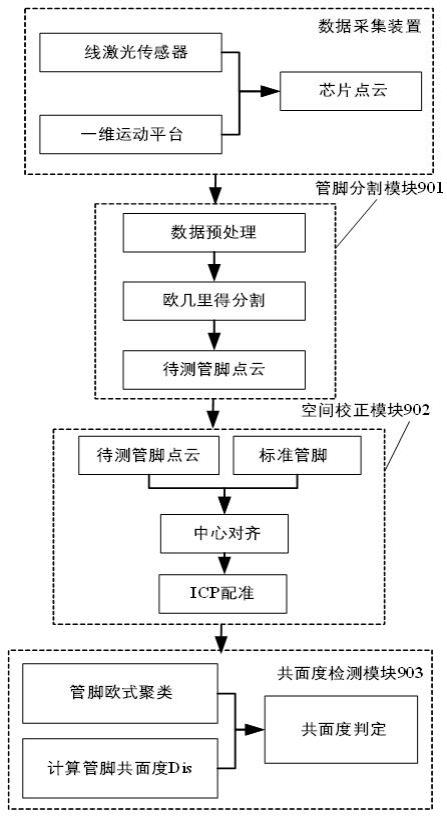
3、采集待测sop芯片的芯片点云,并对所述芯片点云进行聚类分割,获得待测管脚点云,所述待测管脚点云对应多个待测管脚;
4、采用预设基准管脚点云对所述待测管脚点云进行空间校正处理,获得空间校正点云;
5、对所述空间校正点云进行欧式聚类,计算各个所述待测管脚到xoy平面的管脚高度;
6、基于各个所述管脚高度计算管脚共面度,所述管脚共面度用于对所述待测sop芯片进行芯片管脚共面度缺陷判定。
7、可选地,所述对所述芯片点云进行聚类分割,获得待测管脚点云,包括:
8、对所述芯片点云进行统计滤波,获得去噪芯片点云;
9、对所述去噪芯片点云进行体素下采样处理,获得下采样芯片点云,对所述下采样芯片点云进行z轴直通滤波,获得直通滤波点云;
10、对所述直通滤波点云进行欧几里得聚类,获得聚类点云,并对所述聚类点云进行分割,获得待测管脚点云。
11、可选地,所述对所述直通滤波点云进行欧几里得聚类,获得聚类点云,并对所述聚类点云进行分割,获得待测管脚点云,包括:
12、步骤s01:建立所述直通滤波点云对应的k-d tree搜索结构,并随机选择第一聚类点;
13、步骤s02:确定距离所述第一聚类点最近的k个点,以及所述k个点中每个点到所述第一聚类点的距离阈值,并将距离阈值小于预设距离阈值的点划入第一聚类点集;
14、步骤s03:在所述第一聚类点集内随机选择除所述第一聚类点以外的点作为第二聚类点,重复执行步骤s02,直至将符合条件的点全部划入所述第一聚类点集,且当不再向所述第一聚类点集划入新点时,完成所述第一聚类点集的聚类;
15、步骤s04:选择距离所述第一聚类点最近且不属于所述第一聚类点集的点作为第三聚类点,重复执行步骤s02至s03,完成所述第三聚类点的聚类,接着重复执行步骤s04,完成所述直通滤波点云对应的所有聚类,输出聚类点云,所述聚类点云包含多个经聚类后形成的聚类点云集;
16、步骤s05:计算每个所述聚类点云集的点个数,并删除点个数最多的聚类点云集,获得分割后的待测管脚点云。
17、可选地,所述采用预设基准管脚点云对所述待测管脚点云进行空间校正处理,获得空间校正点云,包括:
18、将所述预设基准管脚点云作为目标点云,将所述待测管脚点云作为源点云;
19、采用所述目标点云以及所述源点云进行质心变换计算,获得变换矩阵,并根据所述变换矩阵对所述源点云进行中心对齐,获得粗配准点云;
20、对所述粗配准点云进行区域聚类,获得待测管脚区域质心,以所述待测管脚区域质心作为匹配特征点,与所述目标点云进行icp配准,获得空间校正点云。
21、可选地,所述对所述粗配准点云进行区域聚类,获得待测管脚区域质心,以所述待测管脚区域质心作为匹配特征点,与所述目标点云进行icp配准,获得空间校正点云,包括:
22、步骤s11:确定一个初始对应点集,对所述粗配准点云进行欧式聚类,提取所述粗配准点云中聚类中心作为匹配特征点集,所述匹配特征点集中包含若干个匹配特征点;
23、步骤s12:查找所述目标点云中距离所述匹配特征点最近的点作为匹配对应点,并将查找到的所述匹配对应点整合成一个匹配对应点集;
24、步骤s13:结合所述匹配特征点集以及所述匹配对应点集,采用最小二乘法进行迭代计算,获得最优坐标变换,所述最优坐标变换对应旋转矩阵以及平移向量;
25、步骤s14:采用所述旋转矩阵以及所述平移向量对所述粗配准点云进行更新,获得旋转点云,并计算所述旋转点云与所述目标点云的平均距离平方;
26、步骤s15:若所述平均距离平方大于等于预设距离平方阈值,则重复执行步骤s11至s14,以进行迭代更新,直至计算出的平均距离平方小于预设距离平方阈值;
27、步骤s16:若计算后的平均距离平方小于预设距离平方阈值,则停止迭代,完成空间校正,并输出空间校正点云。
28、可选地,所述对所述空间校正点云进行欧式聚类,计算各个所述待测管脚到xoy平面的管脚高度,包括:
29、对所述空间校正点云进行欧式聚类,以将所述待测sop芯片的每个待测管脚划分为一个聚类簇;
30、计算每一所述聚类簇中所有点到xoy平面的平均距离,所述平均距离为所述聚类簇对应待测管脚到xoy平面的管脚高度。
31、可选地,所述基于各个所述管脚高度计算管脚共面度,包括:
32、从各个所述管脚高度中筛选管脚高度值最大的管脚高度作为最大管脚高度,并从各个所述管脚高度中筛选管脚高度值最小的管脚高度作为最小管脚高度;
33、根据所述最大管脚高度以及所述最小管脚高度进行差值计算,获得管脚共面度。
34、本发明还提供了一种sop芯片管脚共面度检测装置,包括:
35、管脚聚类分割模块,用于采集待测sop芯片的芯片点云,并对所述芯片点云进行聚类分割,获得待测管脚点云,所述待测管脚点云对应多个待测管脚;
36、空间校正处理模块,用于采用预设基准管脚点云对所述待测管脚点云进行空间校正处理,获得空间校正点云;
37、管脚高度计算模块,用于对所述空间校正点云进行欧式聚类,计算各个所述待测管脚到xoy平面的管脚高度;
38、管脚共面度计算模块,用于基于各个所述管脚高度计算管脚共面度,所述管脚共面度用于对所述待测sop芯片进行芯片管脚共面度缺陷判定。
39、本发明还提供了一种电子设备,所述设备包括处理器以及存储器:
40、所述存储器用于存储程序代码,并将所述程序代码传输给所述处理器;
41、所述处理器用于根据所述程序代码中的指令执行如上任一项所述的sop芯片管脚共面度检测方法。
42、本发明还提供了一种计算机可读存储介质,所述计算机可读存储介质用于存储程序代码,所述程序代码用于执行如上任一项所述的sop芯片管脚共面度检测方法。
43、从以上技术方案可以看出,本发明具有以下优点:针对当前sop芯片管脚检测方法中存在的问题,提出了一种基于空间校正的sop芯片管脚共面度检测方法,通过基于欧几里得的管脚分割算法,可以单独分割出用于点云检测的管脚区域,降低了检测管脚点云的计算量;提出运用中心对齐与icp配准的管脚校正方法,以标准管脚作为模板,对管脚点云进行中心对齐以及提取区域质心进行icp配准,实现了针对管脚点云的空间校正,可以消除点云位姿不同带来的影响,使得点云形态规则、便于后续的处理以及分析;通过聚类算法,对各个管脚进行聚类,然后再计算聚类后的每个管脚簇到xoy平面(基准面)距离,得到管脚高度,接着再将管脚之间的最大高度差作为共面度指标,实现了针对sop芯片管脚的共面度检测。
- 还没有人留言评论。精彩留言会获得点赞!