一种基于FPGA的网络巨型帧处理的数据解析方法与流程
本发明涉及巨型帧处理,尤其是一种基于fpga的网络巨型帧处理的数据解析方法。
背景技术:
1、fpga是在pal(可编程逻辑阵列)、gal(通用阵列逻辑)、cpld(复杂可编程逻辑器件)等传统逻辑电路和门阵列的基础上发展起来的一种半定制电路,既解决了半定制电路的不足,又克服了原有可编程器件门电路数有限的缺点,其计算存储、算法加速和低延时传输等方面的独特优势在许多领域都有着深入的技术应用价值。
2、网络巨型帧是一种在计算机网络中传输的数据帧,它的长度超过常规的以太网标准帧,通常,以太网标准帧的最大长度为1500字节,而网络巨型帧的长度可以达到更大的范围。
3、而在无人机领域中,无人机需要通过各种传感器实时获取周围的高速目标,并产生巨型数据帧,以巨型帧的形式传输给数据处理中心进行解析,现有技术中可能会遇到的问题是:
4、现有的数据解析方法的处理和解析速度不够快,无法满足实时性要求,导致无人机无法及时检测和响应高速目标,从而影响飞行控制能力;现有的数据解析方法的错误检测和纠正的准确性不够高,无法有效修复错误,使得数据在传输过程中容易受到损坏或篡改,降低数据的可靠性,对无人机的飞行控制和目标识别产生不良影响;现有的数据解析方法效率不高,导致帧的解析和处理受到影响,使得数据无法按照设定的优先级和顺序进行解析和处理,降低无人机对高速目标的检测和识别能力。
技术实现思路
1、本发明为了解决上述存在的技术问题,提供一种基于fpga的网络巨型帧处理的数据解析方法。
2、本发明的技术方案是这样实现的:
3、一种基于fpga的网络巨型帧处理的数据解析方法,包括以下步骤:
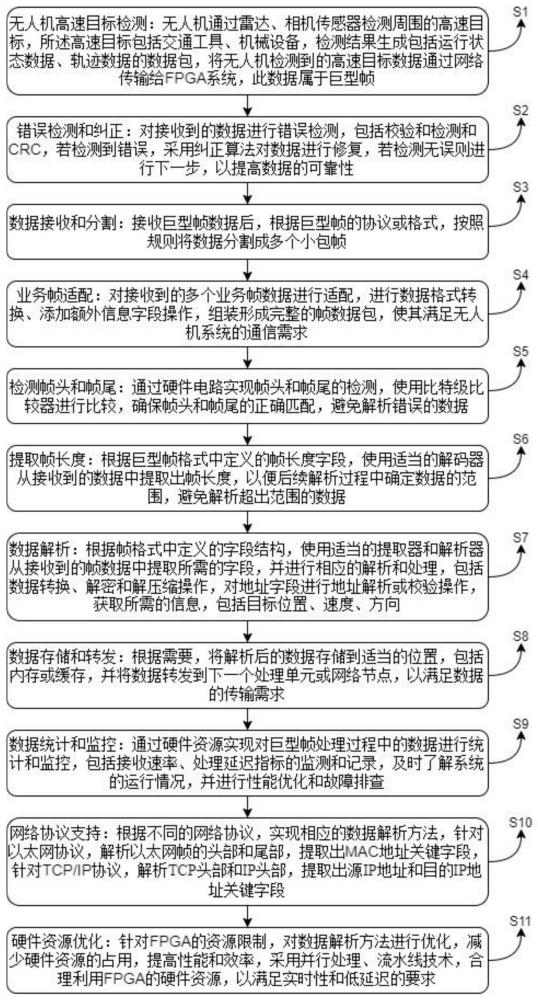
4、s1:无人机高速目标检测:无人机通过雷达、相机传感器检测周围的高速目标,所述高速目标包括交通工具、机械设备,检测结果生成包括运行状态数据、轨迹数据的数据包,将无人机检测到的高速目标数据通过网络传输给fpga系统,此数据属于巨型帧;
5、s2:错误检测和纠正:对接收到的数据进行错误检测,包括校验和检测和crc,若检测到错误,采用纠正算法对数据进行修复,若检测无误则进行下一步,以提高数据的可靠性;
6、s3:数据接收和分割:接收巨型帧数据后,根据巨型帧的协议或格式,按照规则将数据分割成多个小包帧;
7、s4:业务帧适配:对接收到的多个业务帧数据进行适配,进行数据格式转换、添加额外信息字段操作,组装形成完整的帧数据包,使其满足无人机系统的通信需求;
8、s5:检测帧头和帧尾:通过硬件电路实现帧头和帧尾的检测,使用比特级比较器进行比较,确保帧头和帧尾的正确匹配,避免解析错误的数据;
9、s6:提取帧长度:根据巨型帧格式中定义的帧长度字段,使用适当的解码器从接收到的数据中提取出帧长度,以便后续解析过程中确定数据的范围,避免解析超出范围的数据;
10、s7:数据解析:根据帧格式中定义的字段结构,使用适当的提取器和解析器从接收到的帧数据中提取所需的字段,并进行相应的解析和处理,包括数据转换、解密和解压缩操作,对地址字段进行地址解析或校验操作,获取所需的信息,包括目标位置、速度、方向;
11、s8:数据存储和转发:根据需要,将解析后的数据存储到适当的位置,包括内存或缓存,并将数据转发到下一个处理单元或网络节点,以满足数据的传输需求;
12、s9:数据统计和监控:通过硬件资源实现对巨型帧处理过程中的数据进行统计和监控,包括接收速率、处理延迟指标的监测和记录,及时了解系统的运行情况,并进行性能优化和故障排查。
13、作为优选,所述fpga系统集成计算单元、存储单元和高速通信接口。
14、作为优选,所述s2中包括以下子步骤:
15、s2.1:错误检测:对接收到的数据进行错误检测,以确保数据的完整性和准确性;错误检测方法包括校验和检测和循环冗余校验(crc);
16、s2.2:校验和检测:使用校验算法对接收到的数据进行校验和计算;校验和是从数据中产生的一个值,用于检测传输过程中是否发生错误,比较计算出的校验和与传输过程中接收到的校验和,以检测是否有错误发生;
17、s2.3:crc校验:使用循环冗余校验算法对接收到的数据进行crc计算,crc通过对数据进行除法运算,并将余数作为校验值,用于检测和纠正错误,比较计算出的crc值与传输过程中接收到的crc值,以检测是否有错误发生;
18、s2.4:错误纠正:若校验和或crc检测到错误,进入错误纠正步骤进行修复操作;纠正算法通过比较多个冗余数据、使用纠错编码来修复错误,以提高数据的可靠性;
19、s2.5:数据修复:根据错误纠正算法进行数据修复操作,包括替换错误的数据位、重构丢失或损坏的数据。
20、s2.6:无误处理:若校验和和crc检测均未发现错误,则认为数据是无误的,可以进行下一步处理。
21、作为优选,所述s3中包括以下子步骤:
22、s3.1:帧结构查找:在接收到的巨型帧数据中查找帧的起始和终止标识,确定每个帧的位置和长度;
23、s3.2:调度管理:根据每个帧的位置和长度,对接收到的帧进行调度和管理,确保帧按照设定的优先级和顺序进行解析和处理;
24、s3.3:巨型帧结构拆分:根据巨型帧的结构、特征或标识符信息,按照规则和算法将巨型帧拆分为多个自定义专用业务帧。
25、作为优选,所述s7中包括以下子步骤:
26、s7.1:字段提取器:根据巨型帧的定义和格式,在接收到的帧数据中使用字段提取器,按照预设的规则和算法提取出需要的字段,所述字段提取器根据字段的位置、长度、类型进行解析,并将提取出的字段存储在特定的数据结构中,以便后续的处理和应用;
27、s7.2:数据转换和解密:对于需要进行数据转换或解密的字段,根据其特定的格式和加密算法,进行相应的数据转换和解密操作,将二进制数据转换为十进制或十六进制表示,或者对加密数据进行解密操作,以获取原始的信息;
28、s7.3:数据解压缩:对压缩的巨型帧中的数据进行数据解压缩,根据压缩算法和参数,对压缩后的数据进行解压缩操作,将其恢复为原始的数据形式,以便后续的解析和处理;
29、s7.4:地址解析或校验:对包含地址字段的巨型帧进行地址解析和校验操作,根据地址字段的定义和规则,确定目标地址的正确性和合法性,以确保后续处理过程中的数据准确性和安全性;
30、s7.5:提取所需信息:根据上述步骤中提取的字段和解析的结果,获取所需的信息,包括目标的位置坐标、速度向量、运动方向,此信息用于无人机的后续任务和决策,包括进行目标跟踪、避障操作。
31、作为优选,所述数据解析方法还包括以下步骤:
32、s10:网络协议支持:根据不同的网络协议,实现相应的数据解析方法,针对以太网协议,解析以太网帧的头部和尾部,提取出mac地址关键字段,针对tcp/ip协议,解析tcp头部和ip头部,提取出源ip地址和目的ip地址关键字段。
33、作为优选,所述数据解析方法还包括以下步骤:
34、s11:硬件资源优化:针对fpga的资源限制,对数据解析方法进行优化,减少硬件资源的占用,提高性能和效率,采用并行处理、流水线技术,合理利用fpga的硬件资源,以满足实时性和低延迟的要求。
35、与现有技术相比,本发明的有益效果是:
36、本发明通过利用fpga的高并行性和低延迟特性,使其能够对无人机检测到的高速目标数据进行高速处理和解析,提高实时性能,使无人机能够及时检测和响应高速目标,具备更优的飞行控制能力,同时能够实现快速的数据接收、帧结构查找和巨型帧拆分,通过查找帧的起始和终止标识,fpga能够确定每个帧的位置和长度,对接收到的帧进行调度和管理,确保帧按照设定的优先级和顺序进行解析和处理,并将其拆分为多个自定义专用业务帧,提高数据的处理效率;通过利用fpga的可编程性和高性能计算能力使其能够实现快速、准确的错误检测和纠正,通过校验和和crc校验等方法,本方法能够快速检测到巨型帧数据中的错误,并采用纠正算法对数据进行修复,提高数据的可靠性,提高无人机对高速目标的检测和识别能力;因此本发明能够提高无人机的实时性能、数据可靠性和处理效率。
- 还没有人留言评论。精彩留言会获得点赞!