可重复使用飞行器的异构陀螺选用方法及装置与流程
本发明涉及飞行器定位,特别涉及一种可重复使用飞行器的异构陀螺选用方法及装置。
背景技术:
1、陀螺的准确选用是飞行器姿态确定的重要前提。可重复使用飞行器相对于传统飞行器而言,前者不仅需要完成在轨任务,还需要顺利返回,因此可重复使用飞行器需要配备两种不同特性的陀螺(例如光纤陀螺和激光陀螺),而后者只需要完成在轨任务,因此传统飞行器只配备一种特性的陀螺即可(例如光纤陀螺或激光陀螺)。
2、相关技术中,飞行器的陀螺选用方法通常只针对单一特性的陀螺。当针对两种不同特性的陀螺进行选用时,就会导致可重复使用飞行器的导航精度降低。
3、基于此,目前亟需一种可重复使用飞行器的异构陀螺选用方法及装置来解决上述技术问题。
技术实现思路
1、为了提高可重复使用飞行器的导航精度,本发明实施例提供了一种可重复使用飞行器的异构陀螺选用方法及装置。
2、第一方面,本发明实施例提供了一种可重复使用飞行器的异构陀螺选用方法,包括:
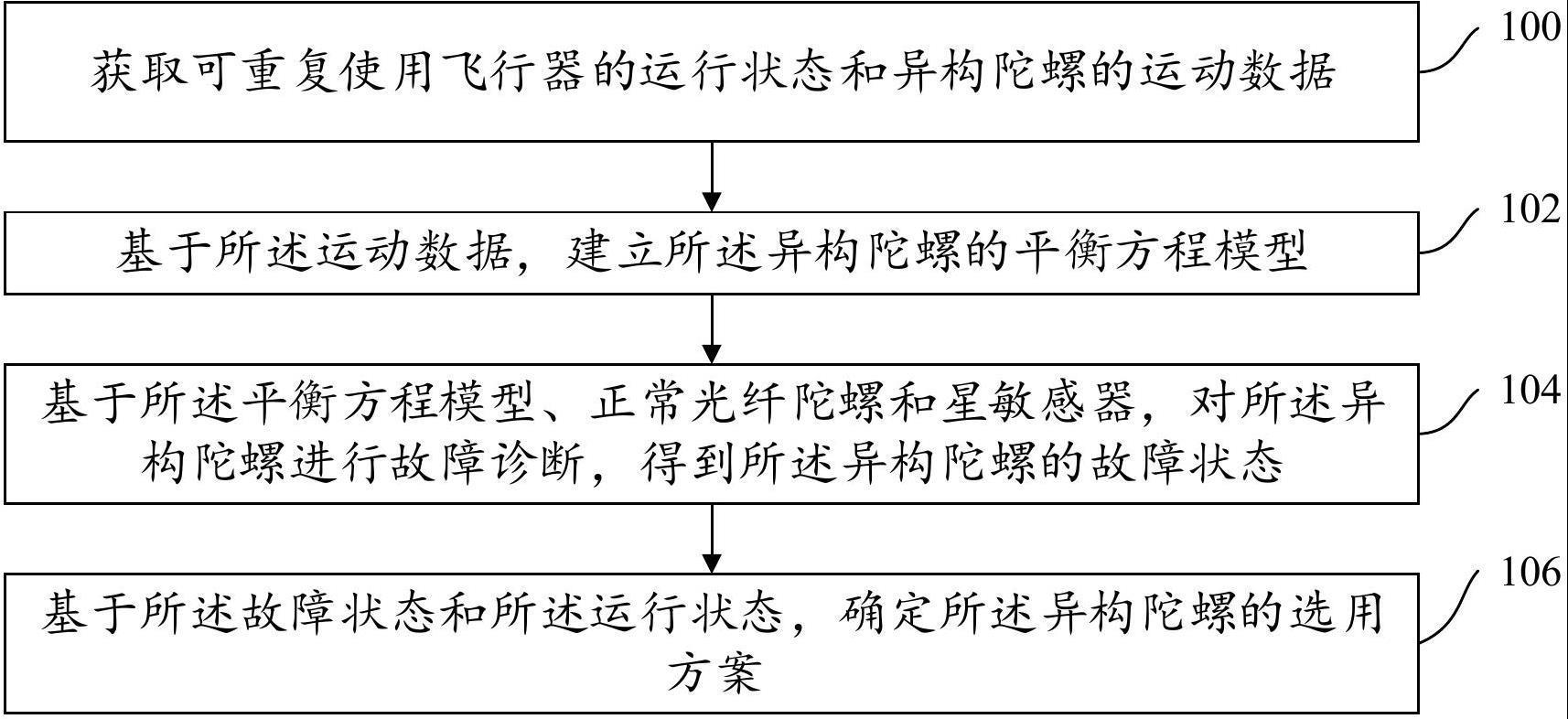
3、获取可重复使用飞行器的运行状态和异构陀螺的运动数据;其中,所述运行状态包括在轨飞行状态和非在轨飞行状态,所述异构陀螺包括至少两组光纤陀螺和至少一组激光陀螺,所述运动数据包括安装矩阵和角增量;
4、基于所述运动数据,建立所述异构陀螺的平衡方程模型;
5、基于所述平衡方程模型、正常光纤陀螺和星敏感器,对所述异构陀螺进行故障诊断,得到所述异构陀螺的故障状态;
6、基于所述故障状态和所述运行状态,确定所述异构陀螺的选用方案。
7、优选地,所述基于所述平衡方程模型、所述光纤陀螺和星敏感器,对所述异构陀螺进行故障诊断,得到所述异构陀螺的故障状态,包括:
8、基于所述平衡方程模型对所述光纤陀螺进行故障诊断,确定正常光纤陀螺的个数;
9、当所述正常光纤陀螺的个数等于或大于五个时,基于所述正常光纤陀螺对所述激光陀螺进行故障诊断,确定正常激光陀螺的个数;
10、当未故障光纤陀螺的个数小于五个,且所述未故障光纤陀螺和所述激光陀螺个数之和大于或等于五个时,基于所述平衡方程模型对所述正常光纤陀螺和所述激光陀螺进行故障诊断,确定正常陀螺的个数;
11、当未故障陀螺的个数小于五个时,基于所述星敏感器对所述未故障陀螺进行故障诊断,确定正常陀螺的个数。
12、优选地,所述基于所述平衡方程模型对所述光纤陀螺进行故障诊断,确定正常光纤陀螺的个数,包括:
13、基于所述平衡方程模型,得到每个所述光纤陀螺的分数;
14、基于所述分数和预设的故障诊断标准,确定正常光纤陀螺的个数。
15、优选地,所述预设的故障诊断标准包括:
16、若每个所述光纤陀螺的分数均为最高分,则不设置故障陀螺;
17、若所述光纤陀螺的分数不完全相同,则基于预设的第一故障阈值设置故障陀螺。
18、优选地,所述基于所述正常光纤陀螺对所述激光陀螺进行故障诊断,确定正常激光陀螺的个数,包括:
19、基于所述正常光纤陀螺,得到所述可重复使用飞行器的第一惯性角速度;
20、基于所述激光陀螺,得到所述可重复使用飞行器的第二惯性角速度;
21、基于所述第一惯性角速度和所述第二惯性角速度,得到所述正常光纤陀螺和所述激光陀螺的第一对比误差;
22、基于预设的第一诊断阈值和所述第一对比误差,确定所述正常激光陀螺的个数。
23、优选地,所述基于预设的第一诊断阈值和所述第一对比误差,确定所述正常激光陀螺的个数,包括:
24、当所述第一对比误差大于或等于所述第一诊断阈值的二倍时,所述激光陀螺的分数降低二分;
25、当所述第一对比误差大于或等于所述第一诊断阈值,且小于所述第一诊断阈值的二倍时,所述激光陀螺的分数降低一分;
26、当所述第一对比误差小于所述第一诊断阈值时,所述激光陀螺的分数增加二分;
27、基于所述激光陀螺的分数和预设的第二故障阈值,设置故障激光陀螺。
28、优选地,所述基于所述星敏感器对所述未故障异构陀螺进行故障诊断,确定正常陀螺的个数,包括:
29、基于所述星敏感器,得到所述可重复使用飞行器的第一角增量;
30、基于所述未故障异构陀螺,得到所述可重复使用飞行器的第二角增量;
31、基于所述第一角增量和所述第二角增量,得到所述星敏感器和所述未故障异构陀螺的第二对比误差;
32、基于预设的第二诊断阈值和所述第二对比误差,确定正常陀螺的个数。
33、优选地,所述基于预设的第二诊断阈值和所述第二对比误差,确定所述正常陀螺的个数,包括:
34、当所述第二对比误差大于或等于所述第二诊断阈值的二倍时,所述未故障异构陀螺的分数降低二分;
35、当所述第二对比误差大于或等于所述第二诊断阈值,且小于所述第二诊断阈值的二倍时,所述未故障异构陀螺的分数降低一分;
36、当所述第二对比误差小于所述第二诊断阈值时,所述未故障异构陀螺的分数增加二分;
37、基于所述未故障异构陀螺的分数和预设的第三故障阈值,设置故障激光陀螺。
38、优选地,所述基于所述故障状态和所述运行状态,确定所述异构陀螺的选用方案,包括:
39、当所述可重复使用飞行器处于非在轨飞行状态时,若存在一组正常的所述激光陀螺,则选用所述激光陀螺测量惯性角速度;若不存在一组正常的所述激光陀螺且存在一组正常的所述光纤陀螺,则选用所述光纤陀螺测量惯性角速度;若不存在一整组正常的所述光纤陀螺且不存在一整组正常的所述激光陀螺,则从所有所述正常陀螺中选用四个所述正常陀螺测量惯性角速度;若所有所述正常陀螺的个数低于三个,则不测量惯性角速度;
40、当所述可重复使用飞行器处于在轨飞行状态时,若存在一组正常的所述光纤陀螺,则选用所述光纤陀螺测量惯性角速度;若不存在一组正常的所述光纤陀螺且存在一组正常的所述激光陀螺,则选用所述激光陀螺测量惯性角速度;若不存在一整组正常的所述光纤陀螺且不存在一整组正常的所述激光陀螺,则从所有所述正常陀螺中选用四个所述正常陀螺测量惯性角速度;若所有所述正常陀螺的个数低于三个,则将轨道角速度赋值给惯性角速度。
41、第二方面,本发明实施例还提供了一种可重复使用飞行器的异构陀螺选用装置,包括:
42、获取单元,用于获取可重复使用飞行器的运行状态和异构陀螺的运动数据;其中,所述运行状态包括在轨飞行状态和非在轨飞行状态,所述异构陀螺包括至少两组光纤陀螺和至少一组激光陀螺,所述运动数据包括安装矩阵和角增量;
43、建模单元,用于基于所述运动数据,建立所述异构陀螺的平衡方程模型;
44、诊断单元,用于基于所述平衡方程模型、正常光纤陀螺和星敏感器,对所述异构陀螺进行故障诊断,得到所述异构陀螺的故障状态;
45、确定单元,用于基于所述故障状态和所述运行状态,确定所述异构陀螺的选用方案。
46、本发明实施例提供了一种可重复使用飞行器的异构陀螺选用方法及装置,首先对异构陀螺进行多轮诊断,再根据预设的阈值判断异构陀螺是否存在异常,并根据不同的诊断结果选出不同的异构陀螺搭配方案来对可重复使用飞行器进行导航。通过对两类不同的陀螺在飞行的不同阶段进行融合一体化设计,解决了不同飞行阶段不同类别的陀螺切换和混合使用的难题,保证了可重复使用飞行器在整个飞行阶段能够根据需求在光纤和激光两种陀螺之间合理的切换,同时充分利用光纤和激光两类陀螺的信息,进行高效准确的故障诊断,保证了飞行器全周期陀螺的导航精度。
- 还没有人留言评论。精彩留言会获得点赞!