目标物标识码的识别方法、装置及计算机可读存储介质与流程
本技术涉及计算机视觉检测,具体而言,涉及一种目标物标识码的识别方法、装置及计算机可读存储介质。
背景技术:
1、存在多个目标物的场景下,涉及到对目标物标识码的识别,例如识别皮带机的多个托辊的托辊id。在皮带机的巡检机器人中,对托辊进行计数和检测是一项非常重要的功能。托辊作为皮带机的核心部件之一,承担着支撑物料、传递能力以及稳定运行的重要角色。通过巡检机器人的视频确认图片中的托辊位置和序号,能够及时监测设备状态、预防故障、优化运行效率,并为数据分析和趋势预测提供重要支持。目前,对于托辊id识别的方法通常有条形码/二维码、射频识别(rfid)、激光刻字识别等。
2、现有技术中,巡检机器人上配备摄像头,通过拍摄托辊的图像来确定托辊id。现有的识别托辊id的方法,会对采集到的图像进行处理,提取托辊图像中的特定特征,例如条形码、二维码、文字或其他独特标识。识别算法会将提取的特征与预先存储的托辊id信息进行匹配,从而确定托辊的唯一id,并将其传送到连接的计算机或系统进行后续处理和存储。
3、然而,通过提取托辊图像中的特定特征,例如条形码、二维码、文字或其他独特标识的图像识别方法,其准确性可能受到环境条件的影响,如光线不稳定、托辊表面脏污等,可能导致识别错误或降低准确性。
技术实现思路
1、本技术实施例的目的在于提供一种目标物标识码的识别方法、装置及计算机可读存储介质,用以解决现有技术通过提取托辊图像中的特定特征,例如条形码、二维码、文字或其他独特标识的图像识别方法,来确定托辊id,其准确性可能受到环境条件的影响,如光线不稳定、托辊表面脏污等,可能导致识别错误或降低准确性的问题。
2、本技术实施例提供的一种目标物标识码的识别方法,包括:
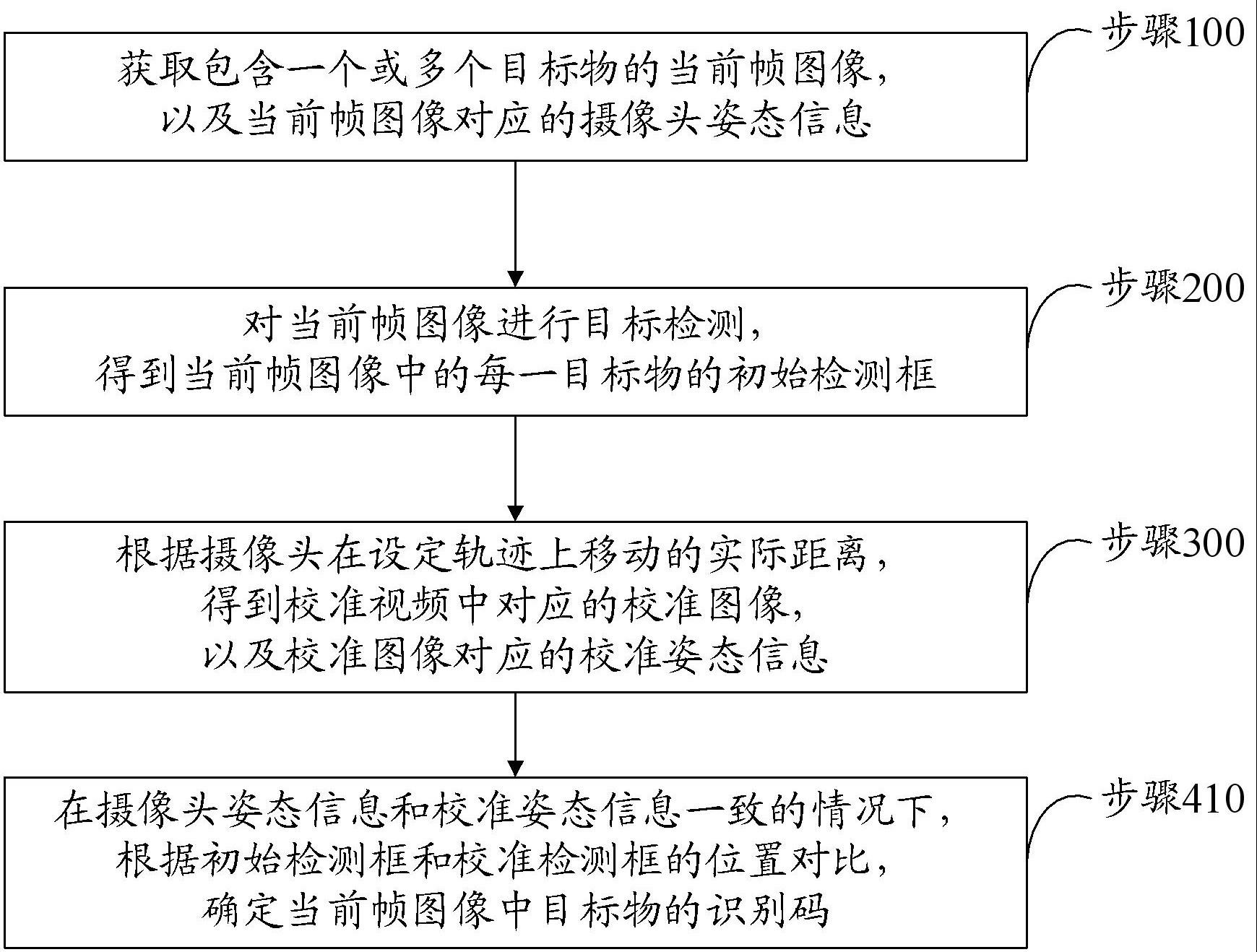
3、获取包含一个或多个目标物的当前帧图像,以及当前帧图像对应的摄像头姿态信息;其中,当前帧图像由摄像头在设定轨迹上移动并拍摄得到;
4、对当前帧图像进行目标检测,得到当前帧图像中的每一目标物的初始检测框;
5、根据摄像头在设定轨迹上移动的实际距离,得到校准视频中对应的校准图像,以及校准图像对应的校准姿态信息;其中,校准图像中包括一个或多个目标物,以及每一目标物的校准检测框和标识码;
6、在摄像头姿态信息和校准姿态信息一致的情况下,根据初始检测框和校准检测框的位置对比,确定当前帧图像中目标物的识别码。
7、上述技术方案中,摄像头在设定轨迹上移动并拍摄得到当前帧图像,对当前帧进行目标检测得到初始检测框;根据摄像头在设定轨迹上移动的实际距离,获取校准图像中在同一位置进行拍摄的校准图像,在校准图像中具有目标物的校准检测框和标识码;在摄像头姿态信息和校准姿态信息一致的情况下,根据初始检测框和校准检测框的位置对比,确定当前帧图像中目标物的识别码。因此,本实施例的方法仅对图像中的目标物进行目标检测,无需或减少在目标物上设置的用于进行图像识别的条形码、二维码、文字或其他独特标识,以减少图像识别受到环境条件的影响的可能性,并且本实施例通过校准视频来进行校准,提高了目标物标识码的识别准确率。例如,目标物为托辊时,无需在托辊表面设置条形码、二维码、文字或其他独特标识以进行图像识别确定托辊id,避免受光线不稳定、托辊表面脏污等环境因素影响导致的识别错误或降低准确性。
8、在一些可选的实施方式中,根据摄像头在设定轨迹上移动的实际距离,得到校准视频中对应的校准图像,以及校准图像对应的校准姿态信息之后,还包括:
9、在摄像头姿态信息和校准姿态信息不一致的情况下,根据摄像头姿态信息和校准姿态信息,将初始检测框转化为校准后检测框;根据校准后检测框和校准检测框的位置对比,确定当前帧图像中目标物的识别码。
10、上述技术方案中,摄像头在设定轨迹上移动并拍摄得到当前帧图像,对当前帧进行目标检测得到初始检测框;根据摄像头在设定轨迹上移动的实际距离,获取校准图像中在同一位置进行拍摄的校准图像,在校准图像中具有目标物的校准检测框和标识码;之后,对初始检测框进行调整后与校准检测框进行匹配,若是匹配上,初始检测框中目标物的标识码即为校准检测框对应的标识码。因此,本实施例的方法仅对图像中的目标物进行目标检测,无需或减少在目标物上设置的用于进行图像识别的条形码、二维码、文字或其他独特标识,以减少图像识别受到环境条件的影响的可能性,并且本实施例通过校准视频来进行校准,提高了目标物标识码的识别准确率。例如,目标物为托辊时,无需在托辊表面设置条形码、二维码、文字或其他独特标识以进行图像识别确定托辊id,避免受光线不稳定、托辊表面脏污等环境因素影响导致的识别错误或降低准确性。
11、在一些可选的实施方式中,获取包含一个或多个目标物的当前帧图像之前,还包括:
12、获取校准视频,以及,校准视频中每一帧图像对应的校准姿态信息和摄像头在设定轨迹上移动的校准距离;
13、其中,校准视频,由摄像头在设定轨迹上移动并拍摄得到。
14、上述技术方案中,通过一次设置校准视频,后续进行目标物识别码的识别时,根据同一个校准视频进行多次识别。其中,校准视频,同样由摄像头在设定轨迹上移动并拍摄得到,并且在拍摄过程中,保存每一帧图像对应的校准姿态信息和摄像头在设定轨迹上移动的校准距离,之后,对校准视频中每一帧图像进行目标检测,得到校准检测框。最后,通过人工手动标记或自动标记再由人工确认的方式,将每一校准检测框标记好正确的标识码。
15、在一些可选的实施方式中,根据摄像头在设定轨迹上移动的实际距离,得到校准视频中对应的校准图像,以及校准图像对应的校准姿态信息,包括:
16、获取与实际距离的值一致的校准距离,并根据该校准距离确定对应的校准图像;
17、根据校准图像,得到对应的校准姿态信息。
18、上述技术方案中,在校准视频中每一帧图像的校准距离的集合中,找到与实际距离最接近的校准距离,该校准距离对应的校准图像即是用以对当前帧图像进行校准的图像。
19、在一些可选的实施方式中,根据摄像头姿态信息和校准姿态信息,将初始检测框转化为校准后检测框,包括:
20、根据摄像头姿态信息和校准姿态信息,得到摄像头角度偏差;
21、根据摄像头角度偏差,对初始检测框的坐标进行调整,得到校准后检测框。
22、上述技术方案中,根据实际检测时,摄像头拍摄的当前帧图像时摄像头的摄像头姿态信息,以及校准视频中摄像头在同一位置拍摄校准图像时摄像头的校准姿态信息,得到两次拍摄时的摄像头角度偏差。根据摄像头角度偏差,对初始检测框的坐标进行调整得到校准后检测框,使得检测框与校准视频中对应校准检测框的位置尽可能一致。
23、在一些可选的实施方式中,摄像头角度偏差,包括:图像竖直方向的第一偏差,图像横向方向的第二偏差,相机光轴方向的第三偏差;
24、根据摄像头角度偏差,对初始检测框的坐标进行调整,得到校准后检测框,包括:
25、根据摄像头角度偏差,得到图像横向平移像素和图像竖直方向平移像素;
26、根据图像横向平移像素和图像竖直方向平移像素,对初始检测框进行移动,得到校准后检测框。
27、其中,第一偏差即是拍摄当前摄像头绕y轴的旋转角度与校准视频中摄像头绕y轴的旋转角度的差值,y轴为图像竖直方向;第二偏差即是拍摄当前摄像头绕x轴的旋转角度与校准视频中摄像头绕x轴的旋转角度的差值,x轴为图像横向方向;第三偏差即是拍摄当前摄像头绕z轴的旋转角度与校准视频中摄像头绕z轴的旋转角度的差值,z轴为相机光轴方向。
28、在一些可选的实施方式中,根据摄像头角度偏差,得到图像横向平移像素和图像竖直方向平移像素,包括:
29、根据第一偏差以及图像焦距,得到图像竖直方向平移像素的第一分量;
30、根据第二偏差以及图像焦距,得到图像横向平移像素的第一分量;
31、根据第三偏差以及检测框中心点坐标,得到图像横向平移像素的第二分量以及图像竖直方向平移像素的第二分量;
32、图像横向平移像素的值等于其第一分量和第二分量之和;图像竖直方向平移像素的值等于其第一分量和第二分量之和。
33、在一些可选的实施方式中,图像横向平移像素dxc:
34、dxc=f×tan(a)+x0-x0×cos(c)+y0×sin(c)
35、图像竖直方向平移像素dyc:
36、dyc=f×tan(b)+y0-x0×cos(c)-y0×sin(c);
37、其中,dxc为图像横向平移像素,dyc为图像竖直方向平移像素,x0为检测框中心点的横坐标,y0为检测框中心点的纵坐标,f为图像焦距,a为图像竖直方向y的第一偏差,b为图像横向方向x的第二偏差,c为相机光轴方向z的第三偏差。
38、在一些可选的实施方式中,根据校准后检测框和校准检测框的位置对比,确定当前帧图像中目标物的识别码,包括:
39、对每一校准检测框,计算每一校准后检测框与校准检测框的交并比,并将交并比的值取最大时对应的校准后检测框与该校准检测框进行匹配,该校准后检测框对应目标物的识别码为该校准检测框对应目标物的识别码。
40、在一些可选的实施方式中,校准后检测框与校准检测框的交并比的计算方法,包括:
41、根据校准后检测框和校准检测框的位置,确定两个检测框的并集面积和交集面积;
42、根据交集面积和并集面积,得到两个检测框的交并比。
43、本技术实施例提供的一种目标物标识码的识别装置,包括:
44、获取模块,用于获取包含一个或多个目标物的当前帧图像,以及当前帧图像对应的摄像头姿态信息;其中,当前帧图像由摄像头在设定轨迹上移动并拍摄得到;
45、目标检测模块,用于对当前帧图像进行目标检测,得到当前帧图像中的每一目标物的初始检测框;
46、查询模块,用于根据摄像头在设定轨迹上移动的实际距离,得到校准视频中对应的校准图像,以及校准图像对应的校准姿态信息;其中,校准图像中包括一个或多个目标物,以及每一目标物的校准检测框和标识码;
47、比对模块,用于在摄像头姿态信息和校准姿态信息一致的情况下,根据初始检测框和校准检测框的位置对比,确定当前帧图像中目标物的识别码。
48、在一些可选的实施方式中,比对模块还用于:在摄像头姿态信息和校准姿态信息不一致的情况下,根据摄像头姿态信息和校准姿态信息,将初始检测框转化为校准后检测框;根据校准后检测框和校准检测框的位置对比,确定当前帧图像中目标物的识别码。
49、在一些可选的实施方式中,还包括:
50、校准视频获取模块,用于获取校准视频,以及,校准视频中每一帧图像对应的校准姿态信息和摄像头在设定轨迹上移动的校准距离;其中,校准视频,由摄像头在设定轨迹上移动并拍摄得到。
51、在一些可选的实施方式中,查询模块还用于:
52、获取与实际距离的值一致的校准距离,并根据该校准距离确定对应的校准图像;
53、根据校准图像,得到对应的校准姿态信息。
54、在一些可选的实施方式中,比对模块还用于:
55、根据摄像头姿态信息和校准姿态信息,得到摄像头角度偏差;
56、根据摄像头角度偏差,对初始检测框的坐标进行调整,得到校准后检测框。
57、在一些可选的实施方式中,摄像头角度偏差,包括:图像竖直方向的第一偏差,图像横向方向的第二偏差,相机光轴方向的第三偏差;比对模块还用于:
58、根据摄像头角度偏差,得到图像横向平移像素和图像竖直方向平移像素;
59、根据图像横向平移像素和图像竖直方向平移像素,对初始检测框进行移动,得到校准后检测框。
60、在一些可选的实施方式中,比对模块还用于:
61、对每一校准检测框,计算每一校准后检测框与校准检测框的交并比,并将交并比的值取最大时对应的校准后检测框与该校准检测框进行匹配,该校准后检测框对应目标物的识别码为该校准检测框对应目标物的识别码。
62、在一些可选的实施方式中,比对模块还用于:
63、根据校准后检测框和校准检测框的位置,确定两个检测框的并集面积和交集面积;
64、根据交集面积和并集面积,得到两个检测框的交并比。
65、本技术实施例提供的一种电子设备,包括:处理器和存储器,所述存储器存储有所述处理器可执行的机器可读指令,所述机器可读指令被所述处理器执行时执行如以上任一所述的方法。
66、本技术实施例提供的一种计算机可读存储介质,该存储介质上存储有计算机程序,该计算机程序被处理器运行时执行如以上任一所述的方法。
- 还没有人留言评论。精彩留言会获得点赞!