基于水面线控制的水下地形伴随反演方法及装置
本发明属于水利工程,具体涉及基于水面线控制的水下地形伴随反演方法及装置。
背景技术:
1、河流是由水流与河道边界共同构成的系统,一方面,水流作用于河道边界,使边界条件发生变化,另一方面,河道边界的变化又反过来影响水流结构,两者相互依存,相互制约,构成河道演变与发展。如:修建水库后,水库壅水造成水库淤积,淤积后地形不仅影响回水淹没还会影响水库效益的发挥,进而威胁水库安全运行。因此河道地形往往是各类研究、工程所必须的基本资料,其直接影响河流演变发展和工程布置。
2、一般来说,水库淤积地形直接确定及预测的常用方法有实地测量、数学模型及物理模型。但是水库库区两侧多为峡谷山地,实地测量地形较难且成本较高,受制于安全性及经济性,地形实测往往不够及时和丰富。而数学模型和物理模型仅能预测地形,且往往仅能作为水库设计运行的参考依据。这使得水库淤积地形确定及研究存在困难,且相较于地形数据,水位数据往往更易测量,因此通过水面反演水深以得到水库地形也逐渐兴起。其中应用较多的是借助遥感数据直接反演水深及水下地形,进一步发展至利用遥感数据分析水力要素之间的关系反演河流测深,如利用水位和河宽的连续同步观测遥感数据估算河流测深、结合多源遥感数据提取水位和河宽以反演河流测深等。但此类方法精度依赖于遥感数据的分辨率,易受河流特性的影响,对河床高程的估算结果与实际地形之间的误差较大,难以适应多种多样的河流地形确定需求。因此需要改进地形反演方法以提高地形模拟精度,但由于天然水库地形复杂多变、水库淤积不断发展等问题,给其他反演方法的应用带来了困难。
技术实现思路
1、本发明是为了解决上述问题而进行的,目的在于提供基于水面线控制的水下地形伴随反演方法及装置,能够准确有效地反演水下复杂地形,使反演结果更符合实际情况。
2、本发明为了实现上述目的,采用了以下方案:
3、<方法>
4、本发明提供了一种基于水面线控制的水下地形伴随反演方法,包括以下步骤:
5、步骤1、收集计算河道的基本参数,包括:地形断面形态特征和实测断面水位数据;
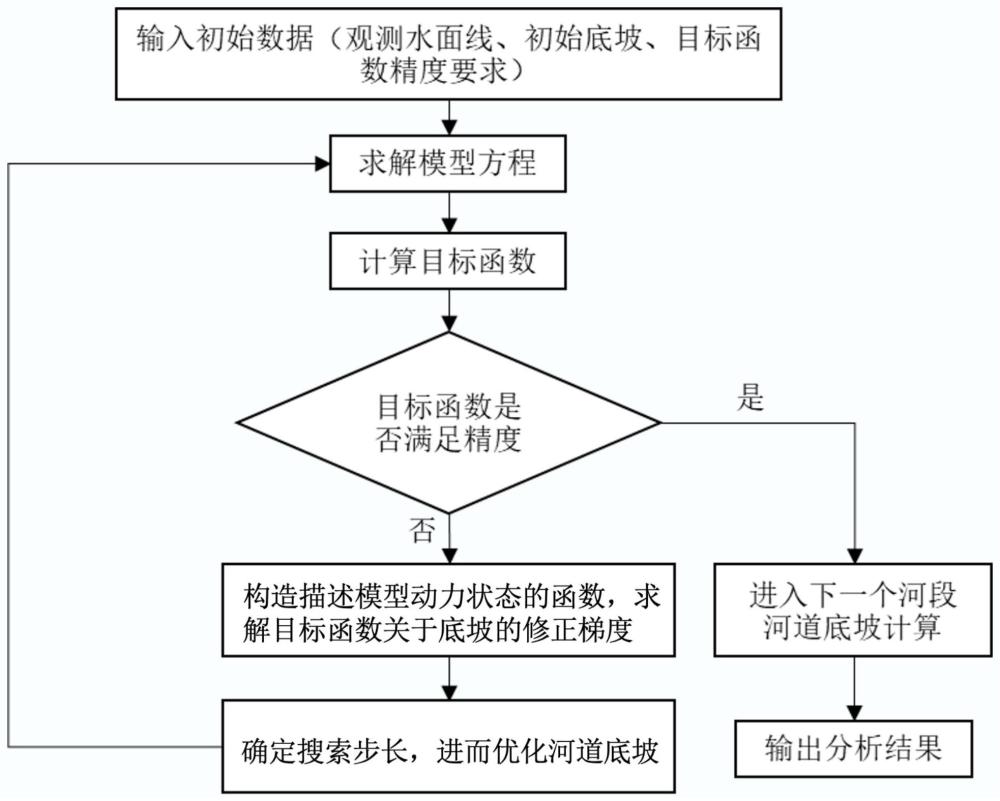
6、步骤2、确定河道计算模型的控制方程,建立目标函数,给定河道底坡的初始值及目标函数的精度要求;
7、步骤2.1、天然河道槽底地形复杂,以水位z表示水面线,将整段河道用许多断面划分成小河段,并建立河道计算模型的控制方程;
8、步骤2.2、构造目标函数,建立伴随模式;
9、以待求断面实测水深和计算水深之间的距离构建目标函数:
10、
11、构造描述模型动力状态的函数:
12、
13、
14、
15、
16、式中,h表示水深;es表示断面比能;λ为系数;r为方向参数,急流时控制断面在上游,r=1;缓流时控制断面在下游,r=-1;δs表示河段长度;i表示河道底坡的坡度;下标d表示待求水深的断面;上标obs表示实测值;下标u表示水深已知的断面;
17、步骤2.3、根据实际工程需求确定目标函数精度要求,给定初始底坡;
18、步骤3、求解模型方程得到水位计算值,计算目标函数并判断是否满足精度要求,若满足则输出迭代至此的河道底坡,若不满足则进行下一步骤;
19、步骤4、求出目标函数关于底坡的修正梯度公式,确定优化控制变量的搜索方向和搜索步长,修正底坡并返回步骤3;
20、步骤4.1、确定优化控制变量的搜索方向dk和搜索步长αk,从xk出发沿着搜索方向逐步修正控制变量:
21、xk+1=xk+dkαk (4.1-1)
22、式中,下标k+1和k分别表示当前修正和前一次修正;
23、令目标函数不断减小直至其模型计算值不断靠近观测值:
24、j(xk+dkαk)<j(xk) (4.1-2)
25、在计算中,将式(2.2-1)关于河道底坡的负梯度方向作为dk,目标函数关于底坡i的修正梯度公式为:
26、
27、步骤4.2、根据确定的搜索步长和搜索方向修正河道底坡:
28、ik+1=ik+αkdk (4.2-1)。
29、优选地,本发明提供的基于水面线控制的水下地形伴随反演方法,在步骤4.1中,搜索步长αk的确定方法:给定一个初始步长α0,沿dk方向优化控制变量后代入目标函数中,如果j(xk+dkα0)<j(xk),则令α1=ωα0,ω是大于1的实数,代入目标函数中,反复循环直至j(xk+dkαk'+1)>j(xk),此时即可确认搜索步长αk=αk',k’为第k次修正里的第k’次搜索。
30、优选地,本发明提供的基于水面线控制的水下地形伴随反演方法,在步骤1中,地形断面形态特征包括断面过水面积、水力半径沿水深变化规律。
31、优选地,本发明提供的基于水面线控制的水下地形伴随反演方法中,在步骤2.1中,每个小河段长度为1.2~1.6倍河宽。
32、优选地,本发明提供的基于水面线控制的水下地形伴随反演方法,在步骤2.1中,在某小河段中设上、下游断面分别为断面1、断面2,河段长度为δs,能量方程为:
33、es2-es1=zb1-zb2-hw1-2 (2.1-1)
34、式中,zb表示槽底高程;下标1和2分别表示断面1和断面2;水头损失hw1-2=hf+hj,包括沿程水头损失hf和局部水头损失hj两部分;
35、在水面线的计算中,有时已知微段下游水深,求上游水面线,有时则相反;用下标u表示水深已知的断面,下标d表示待求水深的断面,因此非均匀流的能量方程为:
36、
37、式中,表示计算河段平均水力坡度;
38、天然河道中出现的局部急变河段通过糙率的取值而被计入沿程损失之中;沿程水头损失计算公式为:
39、
40、式中,为计算河段平均水力坡度;为河段上下游断面流量模数平均值;
41、关于待求断面水深的方程,即模型控制方程为:
42、
43、<装置>
44、进一步,本发明还提供了一种自动实现上述<方法>的基于水面线控制的水下地形伴随反演装置,其特征在于,包括:
45、获取部,获取计算河道的基本参数,包括:地形断面形态特征和实测断面水位数据;
46、模型建立部,根据步骤2.1~2.3确定河道计算模型的控制方程,建立目标函数,给定河道底坡的初始值及目标函数的精度要求;
47、步骤2.1、天然河道槽底地形复杂,以水位z表示水面线,将整段河道用许多断面划分成小河段,并建立河道计算模型的控制方程;
48、步骤2.2、构造目标函数,建立伴随模式;
49、以待求断面实测水深和计算水深之间的距离构建目标函数:
50、
51、构造描述模型动力状态的函数:
52、
53、
54、
55、
56、式中,h表示水深;es表示断面比能;λ为系数;r为方向参数,急流时控制断面在上游,r=1;缓流时控制断面在下游,r=-1;δs表示河段长度;i表示河道底坡的坡度;下标d表示待求水深的断面;上标obs表示实测值;下标u表示水深已知的断面;
57、步骤2.3、根据实际工程需求确定目标函数精度要求,给定初始底坡;
58、求解部,求解模型方程得到水位计算值,计算目标函数并判断是否满足精度要求,若满足则输出迭代至此的河道底坡,若不满足则进入修正部进行修正;
59、修正部,根据步骤4.1~4.2求出目标函数关于底坡的修正梯度公式,确定优化控制变量的搜索方向和搜索步长,修正底坡并返回求解部;
60、步骤4.1、确定优化控制变量的搜索方向dk和搜索步长αk,从xk出发沿着搜索方向逐步修正控制变量:
61、xk+1=xk+dkαk (4.1-1)
62、式中,下标k+1和k分别表示当前修正和前一次修正;
63、令目标函数不断减小直至其模型计算值不断靠近观测值:
64、j(xk+dkαk)<j(xk) (4.1-2)
65、在计算中,将式(2.2-1)关于河道底坡的负梯度方向作为dk,目标函数关于底坡i的修正梯度公式为:
66、
67、步骤4.2、根据确定的搜索步长和搜索方向修正河道底坡:
68、ik+1=ik+αkdk (4.2-1)
69、控制部,与获取部、模型建立部、求解部、修正部均通信相连,控制它们的运行。
70、优选地,本发明提供的基于水面线控制的水下地形伴随反演装置,还可以包括:输入显示部,与控制部通信相连,让用户输入操作指令,并根据操作指令对相应部的输入、输出和中间处理数据以文字、表格、图形或三维动态模型方式进行显示。
71、优选地,本发明提供的基于水面线控制的水下地形伴随反演装置,还可以包括:水下地形生成部,与控制部通信相连,根据求解部输出的河道底坡生成水下地形;清淤部,与控制部通信相连,根据水下地形生成部生成的水下地形确定水库淤积情况,进而确定水库清淤方案。
72、优选地,本发明提供的基于水面线控制的水下地形伴随反演装置,在修正部中,搜索步长αk的确定:给定一个初始步长α0,沿dk方向优化控制变量后代入目标函数中,如果j(xk+dkα0)<j(xk),则令α1=ωα0,ω是大于1的实数,代入目标函数中,反复循环直至j(xk+dkαk'+1)>j(xk),此时即可确认搜索步长αk=αk',k’为第k次修正里的第k’次搜索。
73、优选地,本发明提供的基于水面线控制的水下地形伴随反演装置,在模型建立部中,在某小河段中设上、下游断面分别为断面1、断面2,河段长度为δs,能量方程为:
74、es2-es1=zb1-zb2-hw1-2 (2.1-1)
75、式中,zb表示槽底高程;下标1和2分别表示断面1和断面2;水头损失hw1-2=hf+hj,包括沿程水头损失hf和局部水头损失hj两部分;
76、在水面线的计算中,有时已知微段下游水深,求上游水面线,有时则相反;用下标u表示水深已知的断面,下标d表示待求水深的断面,因此非均匀流的能量方程为:
77、
78、式中,表示计算河段平均水力坡度;
79、天然河道中出现的局部急变河段通过糙率的取值而被计入沿程损失之中;沿程水头损失计算公式为:
80、
81、式中,为计算河段平均水力坡度;为河段上下游断面流量模数平均值;
82、关于待求断面水深的方程,即模型控制方程为:
83、
84、发明的作用与效果
85、本发明所提供的基于水面线控制的水下地形伴随反演方法及装置,首先对河道地形进行合理概化,然后以待求断面实测水深和计算水深之间的距离构建目标函数,接着构造描述模型动力状态的函数,并且提出修正梯度公式,以河道底坡的负梯度方向作为搜索方向,根据目标函数精度要求采用修正梯度公式不断对底坡(河道地形坡度)进行搜索优化,直至满足目标函数精度要求,得到最优河道底坡,最终实现了基于实测水面线下反演得到水库地形,且反演地形和实测地形之间吻合良好,误差较小。本发明为天然和淤积后的河道进行深泓高程反演提供了科学工具,能够快速准确地确定水下地形,进而根据此控制水库淤积和工程布置等。
- 还没有人留言评论。精彩留言会获得点赞!