一种基于图像处理和人工智能识别的智能望远镜的制作方法
本发明属于望远镜,尤其涉及基于图像处理和人工智能识别的智能望远镜。
背景技术:
1、望远镜是一种利用凹透镜和凸透镜观测遥远物体的光学仪器,利用通过透镜的光线折射或光线被凹镜反射使之进入小孔并会聚成像,再经过一个放大目镜而被看到观测目标。
2、天文望远镜对城市灯光造成的光污染较为敏感,在存在光污染的城市中,望远镜受城市地面光线的影响成像模糊,天文爱好者为了追求良好的观测环境,通常需要携带望远镜到郊区、山顶等光污染较少的环境进行天文观测,或者在深夜光污染较少时进行天文观测,极为不便。
技术实现思路
1、本发明实施例的目的在于提供一种基于图像处理和人工智能识别的智能望远镜,旨在解决背景技术中望远镜无法抵抗光污染,造成使用不便的问题。
2、为实现上述目的,本发明实施例提供如下技术方案:
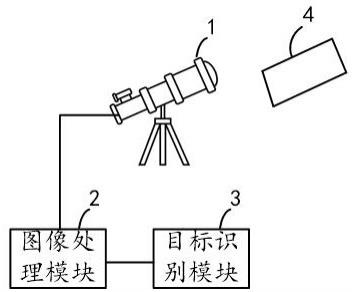
3、一种基于图像处理和人工智能识别的智能望远镜,智能望远镜包括成像模块、图像处理模块、目标识别模块以及遮光筒,所述遮光筒可拆卸的安装在智能望远镜的物镜上;
4、所述成像模块用于采集第一参考图像和第二参考图像,所述第一参考图像为所述物镜未安装所述遮光筒时采集到的图像,所述第二参考图像为所述物镜安装所述遮光筒时采集到的图像;
5、所述图像处理模块用于根据所述第一参考图像和所述第二参考图像确定校准图像;
6、所述成像模块还用于在所述物镜未安装所述遮光筒时采集初始观测图像;
7、所述图像处理模块还用于根据所述校准图像对所述初始观测图像进行去光污染处理,得到目标观测图像;
8、所述目标识别模块用于根据所述校准图像确定目标融合权重,并将所述初始观测图像和所述目标观测图像输入预置的目标识别模型中,依据所述目标融合权重对所述初始观测图像和所述目标观测图像进行特征融合,通过融合后的特征识别出目标对象。
9、作为本发明实施例的进一步限定,所述成像模块具体包括以下单元:
10、采样点设置单元,用于确定所述智能望远镜的多个仰角,以及在每个仰角设置多个采样点;
11、第一参考图像采集单元,用于在所述物镜未安装所述遮光筒时在多个采样点采集图像,得到第一参考图像;
12、第二参考图像采集单元,用于在所述物镜安装所述遮光筒时在多个采样点采集图像,得到第二参考图像。
13、作为本发明实施例的进一步限定,所述图像处理模块具体包括以下单元:
14、图像灰度化单元,用于将所述第一参考图像和第二参考图像灰度化,并计算所述第一参考图像的灰度值和所述第二参考图像的灰度值;
15、灰度差值计算单元,用于计算每个采样点的第一参考图像与第二参考图像的灰度值的差值得到第一灰度差值;
16、校准图像生成单元,用于生成预设尺寸和分辨率的校准图像,按照采样点的分布确定采样点在校准图像中对应的基准像素点,并将基准像素点的灰度值调整至采样点的第一灰度差值;
17、校准图像插值单元,用于对所述基准像素点的灰度值进行插值处理,得到非基准像素点的灰度值,所述非基准像素点为校准图像中除了基准像素点以外的像素点。
18、作为本发明实施例的进一步限定,所述图像处理模块具体还包括以下单元:
19、图像缩放单元,用于对初始观测图像进行缩放,得到尺寸、分辨率与所述校准图像相同的初始观测图像;
20、灰度值校准单元,用于计算缩放后的初始观测图像与所述校准图像中像素坐标相同的像素点的灰度值的第二灰度差值;
21、灰度值调整单元,用于将缩放后的初始观测图像的每个像素点的灰度值调整至所述第二灰度差值,得到目标观测图像。
22、作为本发明实施例的进一步限定,所述目标识别模块具体包括以下单元:
23、目标融合权重确定单元,用于确定校准图像的灰度值的离散度;
24、目标融合权重匹配单元,用于在预置的离散度权重表中查找与所述离散度匹配的权重作为目标融合权重;
25、目标识别单元,用于将所述目标融合权重、所述初始观测图像和所述目标观测图像输入预置的目标识别模型中,依据所述目标融合权重对所述初始观测图像和所述目标观测图像进行特征融合,通过融合后的特征识别出目标对象。
26、作为本发明实施例的进一步限定,所述目标融合权重确定单元具体包括以下子单元:
27、平均灰度值计算子单元,用于计算校准图像中像素点的灰度值的绝对值的平均值;
28、离散度计算子单元,用于计算各个像素点的灰度值的绝对值与所述平均值的差值,并计算所述差值的平均值作为离散度。
29、作为本发明实施例的进一步限定,所述目标识别模型通过以下模块训练:
30、训练图像获取模块,用于获取第一训练图像和第二训练图像,所述第二训练图像为通过训练校准图像对所述第一训练图像进行预处理后的图像,所述第一训练图像标注有第一对象;
31、模型构建模块,用于构建目标识别模型并初始化融合权重;
32、识别模块,用于将第一训练图像和第二训练图像输入目标识别模型中,提取第一训练图像的第一图像特征,以及提取第二训练图像的第二图像特征,并依据融合权重对第一图像特征和第二图像特征融合得到融合特征,依据融合特征识别第二对象;
33、模型更新模块,用于根据所述第一对象和第二对象更新所述融合权重;
34、训练条件判断模块,用于判断是否满足预设的训练条件,若是,停止训练目标识别模,存储所述训练校准图像和所述融合权重,若否,返回识别模块。
35、作为本发明实施例的进一步限定,所述目标识别模型包括第一特征提取子模型、第二特征提取子模型、融合子模型以及识别子模型,所述识别模块具体用于:
36、在第一特征提取子模型中提取第一训练图像的第一图像特征;
37、在第二特征提取子模型中第二训练图像的第二图像特征;
38、在特征融合子模型中依据融合权重对第一图像特征和所述第二图像特征进行融合得到融合特征;
39、在识别子模型中识别融合特征中的第二对象。
40、作为本发明实施例的进一步限定,还包括:
41、图像显示模块,用于显示所述目标观测图像。
42、作为本发明实施例的进一步限定,还包括:
43、目标信息显示模块,用于在目标观测图像上显示目标信息。
44、与现有技术相比,本发明的有益效果是:
45、本发明实施例的望远镜包括成像模块、图像处理模块、目标识别模块以及遮光筒,在观测前先通过安装遮光筒前后的第一参考图像和第二参考图像确定校准图像,并通过校准图像对初始观测图像进行去光污染处理得到目标观测图像,进一步根据校准图像确定目标融合权重,以在目标识别模型中依据目标融合权重对初始观测图像和目标观测图像进行特征融合,通过融合后的特征识别出目标对象,一方面,实现了通过安装遮光筒前后的第一参考图像和第二参考图像确定校准图像,该校准图像表征了观测环境的光污染分布,从而能够通过校准图像对采集到的初始观测图像进行去光污染处理得到目标图像,使得望远镜可以适用于城市或其他有光污染的环境,提高了望远镜的适用环境范围和成像质量,另一方面,通过目标识别模型识别目标对象,提高了望远镜的智能化程度。
- 还没有人留言评论。精彩留言会获得点赞!