一种道闸防砸控制方法及装置与流程
本技术涉及智能道闸控制,尤其涉及一种道闸防砸控制方法及装置。
背景技术:
1、道闸又称挡车器,是专门用于道路上限制机动车行驶的通道出入口管理设备,现广泛应用于公路收费站、停车场系统管理车辆通道,用于管理车辆的出入。
2、为提高道闸在使用时的安全性,防止道闸砸人砸车,通常会配套道闸防砸系统安装在道闸机上。目前道闸自动防砸方案是通过不同的传感器对道闸的附近环境进行感知,判断是否出现车辆,从而防止道闸意外砸车,包括:红外线防砸、地感线圈防砸、雷达防砸。其中,毫米波雷达相较红外线的环境适应能力更强,能有效减少误操作和故障率,毫米波雷达相较于地感线圈,在安装、维护及使用成本都更具优势。
3、现有的毫米波雷达道闸防砸感应在路面出现金属或是类似颗粒的条件下,容易将目标物体与环境物体合并识别,在对距离较远的物体的识别上,容易将两个物体识别为一个,以上情况都会造成毫米波雷达的误识别,进而影响道闸防砸控制的有效性。
技术实现思路
1、有鉴于此,本技术提供了一种道闸防砸控制方法及装置,能够降低毫米波雷达误识别率,提高毫米波雷达检测目标物体的准确度,保证道闸防砸控制的有效性。
2、其技术方案如下:
3、第一方面,本技术实施例提供了一种道闸防砸控制方法,所述方法包括:
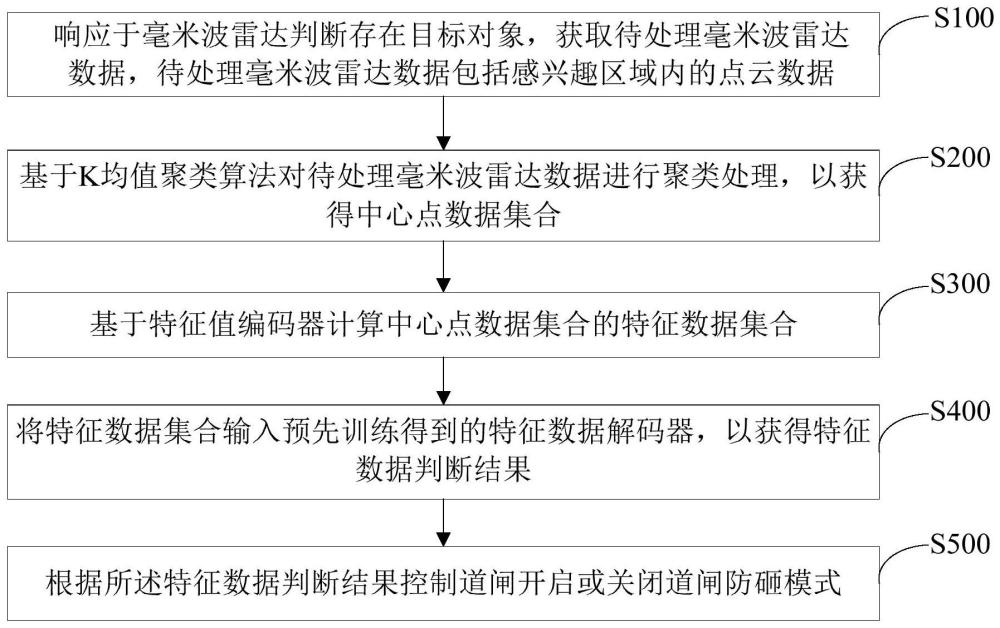
4、响应于毫米波雷达判断存在目标对象,获取待处理毫米波雷达数据,所述待处理毫米波雷达数据包括感兴趣区域内的点云数据;
5、基于k均值聚类算法对所述待处理毫米波雷达数据进行聚类处理,以获得中心点数据集合;
6、基于特征值编码器计算所述中心点数据集合的特征数据集合;
7、将所述特征数据集合输入预先训练得到的特征数据解码器,以获得特征数据判断结果;
8、根据所述特征数据判断结果控制道闸开启或关闭道闸防砸模式。
9、可选的,所述获取待处理毫米波雷达数据,包括:
10、获取原始毫米波雷达数据,所述原始毫米波雷达数据包括毫米波雷达采集到的三维点云数据;
11、将所述三维点云数据投影转换为二维点云数据,并将所述二维点云数据中不符合感兴趣区域的数据剔除,以得到所述待处理毫米波雷达数据。
12、可选的,所述基于特征值编码器计算所述中心点数据集合的特征数据集合,包括:
13、从所述中心点数据集合中获取预设时间周期的中心点数据子集合;
14、基于特征值编码器计算所述中心点数据子集合的特征值数据,以得到所述特征数据集合;其中,所述特征值数据包括:中心点横坐标、中心点纵坐标、平均值、中位值、峰峰值、方差、标准差、偏度、峰度以及交叉熵。
15、可选的,所述特征数据解码器,包括:第一长短期记忆模型lstm模型、第二长短期记忆模型lstm模型以及全连接层;其中,所述第一lstm模型以及所述第二lstm模型分别包含二十个隐藏层,所述第一lstm模型的输入端用于输入所述特征数据集合,所述第一lstm模型的输出端与所述第二lstm模型的输入端连接,所述第二lstm模型的输出端与所述全连接层的输入端连接,所述全连接层的输出端输出二分类预测结果。
16、可选的,所述特征数据解码器的训练过程包括:
17、获取标注数据集,所述标记数据集包括训练数据集、验证数据集以及测试数据集;
18、基于pytorch深度学习框架,利用所述训练数据集对所述特征数据解码器进行迭代训练,以得到待验证特征数据解码器;
19、利用所述验证数据集对所述待验证特征数据解码器进行损失值最优验证,以得到待测试特征数据解码器;
20、利用所述测试数据集对所述待测试特征数据解码器进行测试,以确定训练后的特征数据解码器,所述训练后的特征数据解码器满足预设评价指标要求,所述预设评价指标要求包括识别精度指标以及召回率指标。
21、可选的,所述获取标注数据集,包括:
22、响应于激光雷达和/或摄像头识别到所述感兴趣区域内存在目标对象,获取预设时间周期的特征数据集合;
23、通过半监督学习算法对所述预设时间周期的特征数据集合进行标注,以获得标注数据子集;
24、将预设周期内获得的所述标注数据子集预设划分比例进行划分,以得到所述训练数据集、所述验证数据集以及所述测试数据集。
25、可选的,所述根据所述特征数据判断结果控制道闸开启或关闭道闸防砸模式包括:
26、响应于所述特征数据判断结果指示所述毫米波雷达判断正确,控制道闸保持开启状态;
27、响应于所述特征数据判断结果指示所述毫米波雷达判断错误,控制道闸关闭。
28、第二方面,本技术实施例提供了一种道闸防砸控制装置,所述装置包括:
29、获取模块,用于响应于毫米波雷达判断存在目标对象,获取待处理毫米波雷达数据,所述待处理毫米波雷达数据包括感兴趣区域内的点云数据;
30、聚类模块,用于基于k均值聚类算法对所述待处理毫米波雷达数据进行聚类处理,以获得中心点数据集合;
31、特征值编码器,用于计算所述中心点数据集合的特征数据集合;
32、特征数据解码器,用于解码所述特征数据集合,以获得特征数据判断结果;
33、道闸控制模块,用于根据所述特征数据判断结果控制道闸开启或关闭道闸防砸模式。
34、可选的,所述获取模块包括:
35、数据获取子模块,用于响应于毫米波雷达判断存在目标对象,获取原始毫米波雷达数据,所述原始毫米波雷达数据包括毫米波雷达采集到的三维点云数据;
36、数据处理子模块,用于将所述三维点云数据投影转换为二维点云数据,并将所述二维点云数据中不符合感兴趣区域的数据剔除,以得到所述待处理毫米波雷达数据。
37、可选的,所述道闸控制模块包括:
38、道闸开启子模块,用于响应于所述特征数据判断结果指示所述毫米波雷达判断正确,控制道闸保持开启状态;
39、道闸关闭子模块,用于响应于所述特征数据判断结果指示所述毫米波雷达判断错误,控制道闸关闭。
40、上述技术方案具有如下有益效果:
41、本技术实施例提供的一种道闸防砸控制方法,在执行所述方法时,所述方法包括:响应于毫米波雷达判断存在目标对象,获取待处理毫米波雷达数据,所述待处理毫米波雷达数据包括感兴趣区域内的点云数据;基于k均值聚类算法对所述待处理毫米波雷达数据进行聚类处理,以获得中心点数据集合;基于特征值编码器计算所述中心点数据集合的特征数据集合;将所述特征数据集合输入预先训练得到的特征数据解码器,以获得特征数据判断结果;根据所述特征数据判断结果控制道闸开启或关闭道闸防砸模式。由此可见,本技术实施例基于特征值编码器以及特征数据解码器的架构实现对毫米波雷达识别准确性的判断,能够对毫米波雷达误识别数据进行过滤,降低毫米波雷达误识别率,提高毫米波雷达检测目标物体的准确度,保证道闸防砸控制的有效性。
42、本技术实施例还提供了与上述道闸防砸控制方法相对应的装置,具有与上述方法相同的有益效果。
- 还没有人留言评论。精彩留言会获得点赞!