一种文物碎片的点云拼接方法
本发明涉及点云数据拼接,具体而言,涉及一种文物碎片的点云拼接方法。
背景技术:
1、在我国文物保护与考古挖掘领域,许多文物由于其自身材料脆性、地下侵蚀风化、勘测开采手段限制等因素通常以碎片形式出土,该情况对于我国历史传承是十分重大的损失,同时也是我国文物保护领域十分重要的议题。传统文物碎片复原工作通常采用工作人员依靠经验手动拼接,这种方法通常效率低下,受实际情况影响严重,而且需要大量的人力物力。
2、近年来由于三维激光扫描技术与人工智能技术的飞速发展,通过三维激光扫描仪将实体模型转换为点云模型,许多依靠手工操作的工作都可以通过逆向数字化、自动化的方式解决,这也使得兵马俑复原工作的自动化、智能化成为了可能。人工智能是近年来新兴的计算机研究领域,基于针对性的点云人工智能深度模型网络通过训练不同网络模型从而实现点云的识别、分类、分割等工作,同时搭配相应的算法,可以实现数字模型的拼接工作。
3、常用的点云拼接算法都是通过找到某一特定类型的点云特征,再通过点云特征匹配的方法实现对应模型的拼接。启发式算法通常通过迭代的方式进行最优化求解,其具有适用性广、稳定性强的特点,因此通过启发式算法进行点云匹配工作具有很强的现实意义。
4、现阶段对于点云拼接的研究多集中在对于指定点云的更精确配准的工作,而对于全局性、多数量的拼接方法研究几近空白;由于点云数据量大、不同种类碎片点云特征差异大,单一的特征匹配算法难以达到全局点云高适应度、自动化程度高的拼接结果;传统启发式算法具有计算量大、计算过程中存在大量不利结果、易出现局部收敛、在最优解附近易出现收敛等问题,因此探究一种对于点云数据适应度强、适用于大量数据计算、不易出现局部收敛、自动化程度高的点云拼接方法对于点云数据的拼接工作具对于我国文物保护领域有极高的实用价值。
技术实现思路
1、本发明实施例提供一种文物碎片的点云拼接方法,以解决的点云拼接结果准确性低的技术问题。
2、本发明实施例提供的一种文物碎片的点云拼接方法,包括以下步骤:
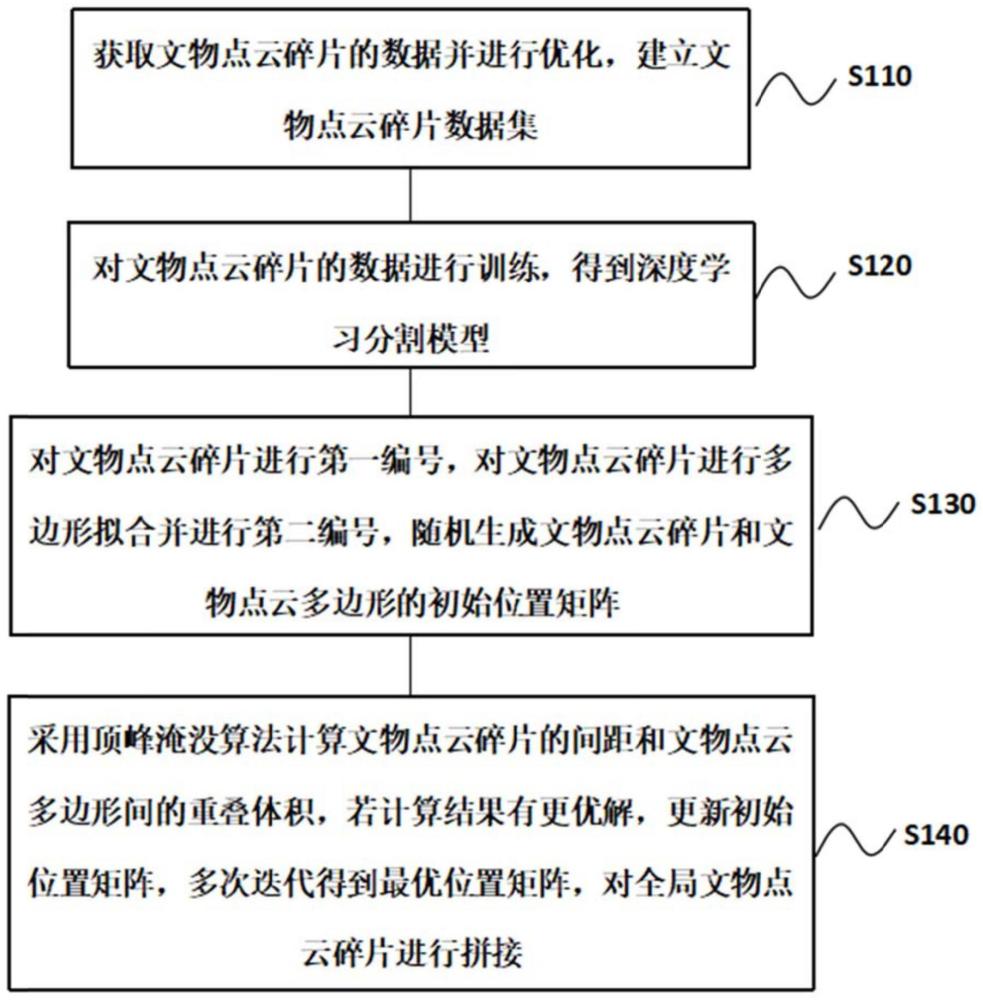
3、获取文物点云碎片的数据并进行优化,建立文物点云碎片数据集;
4、对文物点云碎片的数据进行训练,得到深度学习分割模型;
5、对文物点云碎片进行第一编号,对文物点云碎片进行多边形拟合并进行第二编号,随机生成文物点云碎片和文物点云多边形的初始位置矩阵;
6、采用顶峰淹没搜索算法计算文物点云碎片的间距和文物点云多边形间的重叠体积,若计算结果有更优解,更新初始位置矩阵,多次迭代得到最优位置矩阵,对全局文物点云碎片进行拼接。
7、优选的,所述获取文物点云碎片的数据并进行优化,建立文物点云碎片数据集,包括以下步骤:
8、获取文物点云碎片的数据;
9、使用点云处理软件去除文物点云碎片的数据噪音、删除文物点云碎片的数据体外孤点、统一文物点云碎片的数据密度与格式、标定文物点云碎片的数据残面与非残面、根据文物点云碎片增强生成新的文物点云碎片;
10、随机抽取文物点云数据,制作得到用于深度学习的训练集、测试集和验证集。
11、优选的,所述对文物点云碎片的数据进行训练,得到深度学习分割模型,包括以下步骤:
12、搭建pointnet++网络模型框架;
13、使用pointnet++网络对文物点云碎片的数据训练集进行训练,得到文物点云碎片深度学习分割模型。
14、优选的,所述使用pointnet++网络对文物点云碎片的数据训练集进行训练,获得文物点云碎片深度学习分割模型后,还包括以下步骤:
15、采用语义分割评价指标和准确率对所述深度学习分割模型进行评估。
16、优选的,所述对文物点云碎片进行第一编号,对文物点云碎片进行多边形拟合并进行第二编号,随机生成编号后文物点云碎片和文物点云多边形的初始位置矩阵,包括以下步骤:
17、对全局待匹配文物点云碎片进行第一编号,分别为p1、p2、p3、…、pn,判断任意两个待匹配文物点云碎片的距离与预设碎片距离阈值f的大小,若小于预设碎片距离阈值f则对这两个碎片进行多边形拟合,共拟合n个文物点云多边形并对文物点云多边形进行第二编号,分别为d1、d2、d3、…、dn;
18、将n个文物点云碎片在x、y、z的方向上的平移和转动变化后随机生成g个n×6的初始位置矩阵。
19、优选的,所述采用顶峰淹没搜索算法计算文物点云碎片的间距和文物点云多边形间的重叠体积,若计算结果有更优解,更新初始位置矩阵,多次迭代得到最优位置矩阵,对全局文物点云碎片进行拼接,包括以下步骤:
20、求步进矩阵步,将随机生成的g个初始位置矩阵作为顶峰淹没搜索方法的初始数据,计算所述初始位置矩阵的步进距离,并将各所述初始位置矩阵沿正负方向移动所述步进距离,得到步进位置矩阵;
21、更新矩阵步,根据初始位置矩阵和步进矩阵分别计算得到点云间距和重叠体积,若根据步进矩阵计算得到的点云间距和重叠体积更优,则对初始位置矩阵更新为步进位置矩阵;
22、循环步,循环迭代求步进矩阵步与更新矩阵步,至初始位置矩阵更新完成。
23、优选的,所述求步进矩阵步,包括以下步骤:
24、计算得到初始位置矩阵的初始步进距离为:
25、lp=l/2;
26、其中,l为相邻初始位置矩阵间的距离,lp为第p个初始位置矩阵的初始步进距离;
27、将各初始位置矩阵沿矩阵正负方向移动初始步进距离,得到步进位置矩阵。
28、优选的,所述更新矩阵步,包括以下步骤:
29、根据初始位置矩阵计算得到每个文物点云碎片与其他文物点云碎片之间最近点的第一点云间距lab,计算得到每个文物点云多边形与其他文物点云多边形的第一重叠体积cmn;
30、根据步进位置矩阵计算得到每个文物点云碎片与其他文物点云碎片之间最近点的第二点云间距l'ab,计算得到每个文物点云多边形与其他文物点云多边形第二重叠体积c'mn;
31、采用非支配排序方法比较第一点云间距的绝对值|lab|和第二点云间距的绝对值|l'ab|、第一重叠体积的绝对值|cmn|和第二重叠体积的绝对值|c’mn|的大小,
32、若存在任意的|lab|都大于其对应的|l'ab|,且存在任意的|cmn|都大于其对应的|c'mn|,则将该初始位置矩阵更新为|l'ab|和|c’mn|最小对应的步进位置矩阵;
33、若存在任意的|lab|小于其对应的|l’ab|,和/或,存在任意的|cmn|小于其对应的|c’mn|,则在下一循环中设置步进缩减系数α,且每次设置的步进缩减系数α都要比上一循环的步进缩减系数α小,步进缩减系数α逐步趋近于0,更新该初始位置矩阵的下一循环的步进距离l’p为:
34、l’p=α×lp;
35、其中(0<α<1)。
36、优选的,所述更新矩阵步,还包括以下步骤:
37、将第一点云间距lab与预设间距阈值h对比,若lab大于h,则认定两部分文物点云碎片为非相邻文物点云碎片,其数值变为∞,不再进行拼接。
38、优选的,所述循环步,还包括以下步骤:
39、设置第一水位线w1和第二水位线w2为:
40、w1=(labmax-labmin)×i/iter;w2=(cmnmax-cmnmin)×i/iter;
41、其中,labmax与labmin分别为当前迭代中第一点云间距的最大值与最小值,cmnmax与cmnmin分别为当前迭代中第一重叠体积的最大值与最小值,i为当前迭代次数,iter为总迭代次数;
42、循环迭代求步进矩阵步与更新矩阵步,设置淹没间隔j,每迭代j代进行一次淹没操作,所述淹没操作包括:删除第一点云间距小于第一水位线w1所对应的初始位置矩阵,删除第一重叠体积小于第二水位线w2所对应的初始位置矩阵,设置水位警戒数量a,若初始位置矩阵数量小于a,随机生成初始位置矩阵;
43、循环迭代完成后,得到最优位置矩阵,并对全局文物点云碎片进行拼接。
44、本发明实施例所提供的的有益效果在于:采用本发明所提供的文物碎片的点云拼接方法中,获取文物点云碎片的数据并进行优化,对文物点云碎片的数据进行训练,得到深度学习分割模型,实现点云碎片的自动分割,大幅度降低拼接难度并剔除非拼接点云计算;随机生成初始位置矩阵,提高了计算效率;将顶峰淹没搜索算法引入到文物点云碎片的全局拼接,通过计算文物点云碎片的间距和文物点云多边形间的重叠体积,根据计算结果更新初始位置矩阵,多次迭代得到最优解,完成全局文物点云碎片的拼接,有效地得到文物点云碎片拼接的最优解,提高了文物点云拼接结果的准确性。
- 还没有人留言评论。精彩留言会获得点赞!