基于改进Chan算法的三维定位方法和装置与流程
本技术涉及定位导航,尤其涉及一种基于改进chan算法的三维定位方法和装置,还涉及用于执行该基于改进chan算法的三维定位方法的电子设备及存储介质。
背景技术:
1、超宽带(ultra-wideband,uwb)技术是一种新兴的无线通信技术,采用纳秒级非正弦波窄脉冲在极宽的频谱上传输极低功率信号,进而实现无载波通信。uwb定位是指利用事先布置好的已知位置的锚点与新加入的标记点进行通信,获取标记点与各锚点之间的距离相关参数,如到达时间(time of arrival,toa)、到达时间差(time difference ofarrival ,tdoa)、到达角度(angle of arrival ,aoa)、接收信号强度(received signalstrength indication,rssi)等,再采用如chan、taylor等定位算法对获得的距离相关参数进行定位计算,即可得到标记点的位置。uwb定位具有精度高、抗干扰、功耗低、布设方便、性价比高等特点,越来越多地应用于机场、地铁、商场等场景的导航定位。目前,现有的uwbtoa定位技术中用于进行三维定位的chan算法一般要求锚点安装在不同高度,然而在实际应用中,在室内不同高度安装锚点时容易使锚节点受到遮挡,而且受室内环境因素影响,锚点难以安装在准确的位置上且安装好后位置也容易因外力而发生改变,这些情况都将会影响三维定位的准确性。
技术实现思路
1、有鉴于此,本技术实施例提供了一种基于改进chan算法的三维定位方法和装置,以及用于执行该基于改进chan算法的三维定位方法的电子设备及存储介质,利用改进chan算法进行三维定位计算,适用于锚点位于同一高度的场景中,可以便于锚点安装,减少锚点遮挡,提高三维定位的准确性。
2、本技术实施例的第一方面提供了一种基于改进chan算法的三维定位方法,包括:
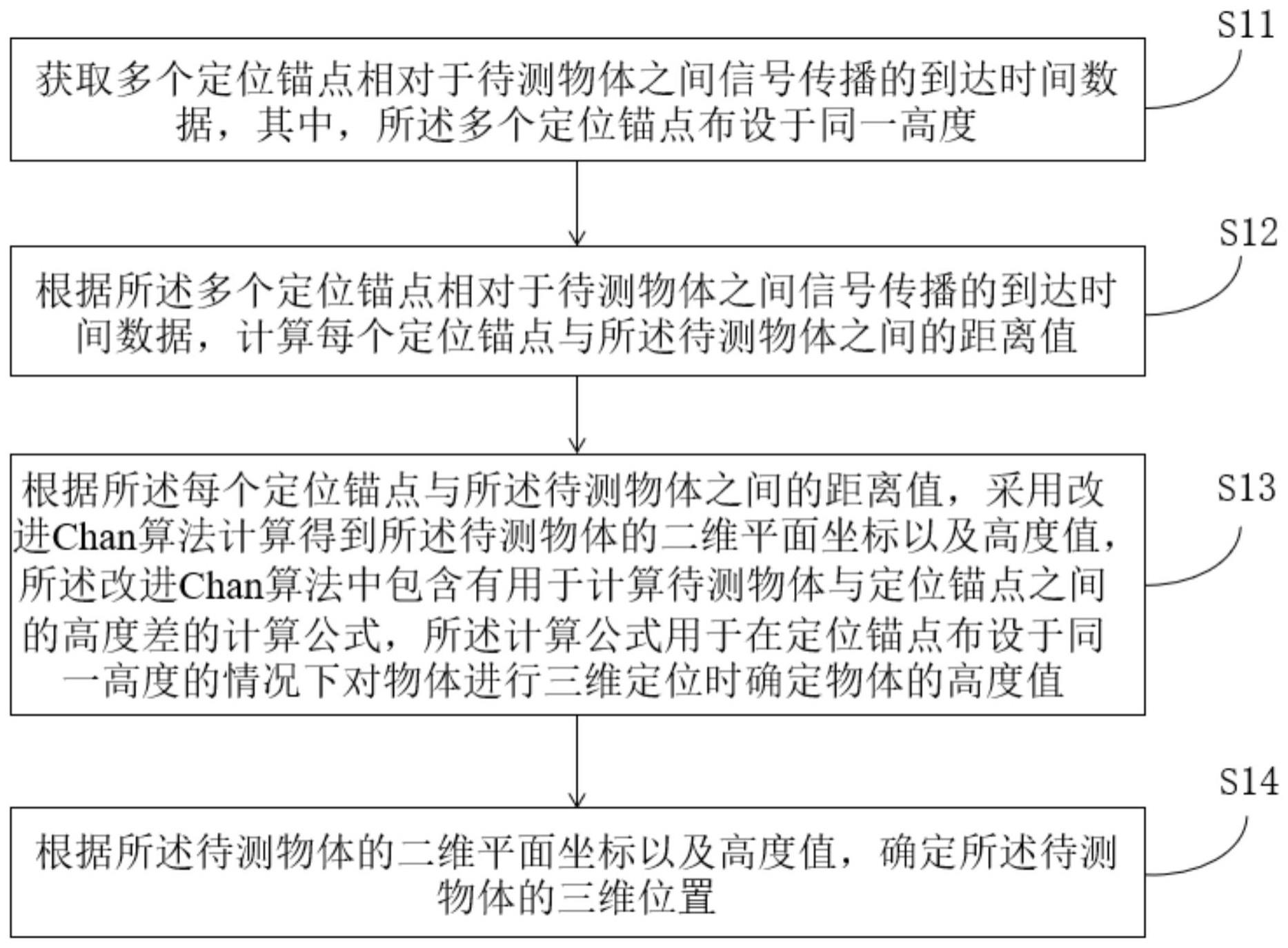
3、获取多个定位锚点相对于待测物体之间信号传播的到达时间数据,其中,所述多个定位锚点布设于同一高度;
4、根据所述多个定位锚点相对于待测物体之间信号传播的到达时间数据,计算每个定位锚点与所述待测物体之间的距离值;
5、根据所述每个定位锚点与所述待测物体之间的距离值,采用改进chan算法计算得到所述待测物体的二维平面坐标以及高度值,所述改进chan算法中包含有用于计算待测物体与定位锚点之间的高度差的计算公式,所述计算公式用于在定位锚点布设于同一高度的情况下对物体进行三维定位时确定物体的高度值;
6、根据所述待测物体的二维平面坐标以及高度值,确定所述待测物体的三维位置。
7、在一种可能的实现方式中,所述采用改进chan算法计算得到所述待测物体的二维平面坐标以及高度值的步骤,包括:
8、采用所述改进chan算法中矩阵形式的uwb toa距离观测值数学方程的方程解以及所述方程解所对应的协方差矩阵计算得到所述待测物体的二维平面坐标;
9、根据所述待测物体的二维平面坐标以及所述改进chan算法中用于计算待测物体与定位锚点之间的高度差的计算公式,计算得到所述待测物体与所述定位锚点之间的高度差值,根据所述定位锚点的高度值以及所述待测物体与所述定位锚点之间的高度差值,计算得到所述待测物体的高度值。
10、在一种可能的实现方式中,所述改进chan算法中矩阵形式的uwb toa距离观测值数学方程为:
11、
12、所述改进chan算法中矩阵形式的uwb toa距离观测值数学方程的方程解为:
13、
14、所述方程解所对应的协方差矩阵为:
15、
16、其中,,表示为距离观测值向量,表示为第i个定位锚点对应得到的距离观测值,表示为第i个定位锚点的横坐标值,表示为第i个定位锚点的纵坐标值,n表示为定位锚点的个数;表示为距离观测值残差向量,表示为的误差值;表示为设计矩阵;表示为待估参数向量;表示为待测物体的横坐标值,表示为待测物体的纵坐标值,表示为待测物体的观测距离;,表示为观测值协方差矩阵,,,表示为的噪声方差。
17、在一种可能的实现方式中,所述改进chan算法中用于计算待测物体与定位锚点之间的高度差的计算公式为:
18、
19、其中,表示为待测物体的观测距离;、、表示为待测物体的三维坐标;表示为定位锚点的高度值。
20、在一种可能的实现方式中,所述根据所述每个定位锚点与所述待测物体之间的距离值,采用改进chan算法计算得到所述待测物体的二维平面坐标以及高度值的步骤之前,还包括:
21、获取所述多个定位锚点的高度值,其中,每个定位锚点的高度值相同;
22、根据所述定位锚点的高度值,采用uwb toa距离观测值数学方程进行算法推导、矩阵形式表示以及利用最小二乘法进行方程计算,获得所述改进chan算法,所述改进chan算法中包括矩阵形式的uwb toa距离观测值数学方程的方程解、所述方程解所对应的协方差矩阵以及用于计算待测物体与定位锚点之间的高度差的计算公式。
23、在一种可能的实现方式中,所述根据所述定位锚点的高度值,采用uwb toa距离观测值数学方程进行算法推导、矩阵形式表示以及利用最小二乘法进行方程计算,获得所述改进chan算法的步骤之后,还包括:
24、构建若干个表征物体位置的高度值固定的三维坐标数据;
25、根据所述若干个表征物体位置的高度值固定的三维坐标数据,对所述改进chan算法进行仿真处理,以确定所述改进chan算法的定位精度。
26、在一种可能的实现方式中,所述根据所述若干个表征物体位置的高度值固定的三维坐标数据,对所述改进chan算法进行仿真处理,以确定所述改进chan算法的定位精度的步骤,包括:
27、针对每个三维坐标数据,获得多个观测距离值,所述多个观测距离值与所述多个定位锚点一一对应;
28、针对每个所述三维坐标数据获得的每个观测距离值,加入预设的服从正态分布的观测噪声,获得含观测噪声的观测距离值;
29、采用所述改进chan算法对所述含观测噪声的观测距离值进行解算,获得所述三维坐标数据对应表征的物体位置的仿真三维坐标值;
30、将所述仿真三维坐标值与所述三维坐标数据进行比对,获得坐标差值;
31、根据所有三维坐标数据对应获得的坐标差值,计算得到在高度值固定的平面上的平面误差的均方根误差和高程误差的均方根误差,所述平面误差的均方根误差和高程误差的均方根误差用于表示所述改进chan算法的定位精度。
32、本技术实施例的第二方面提供了一种基于改进chan算法的三维定位装置,包括:
33、获取模块,用于获取多个定位锚点相对于待测物体之间信号传播的到达时间数据,其中,所述多个定位锚点布设于同一高度;
34、第一计算模块,用于根据所述多个定位锚点相对于待测物体之间信号传播的到达时间数据,计算每个定位锚点与所述待测物体之间的距离值;
35、第二计算模块,用于根据所述每个定位锚点与所述待测物体之间的距离值,采用改进chan算法计算得到所述待测物体的二维平面坐标以及高度值,所述改进chan算法中包含有用于计算待测物体与定位锚点之间的高度差的计算公式,所述计算公式用于在定位锚点布设于同一高度的情况下对物体进行三维定位时确定物体的高度值;
36、确定模块,用于根据所述待测物体的二维平面坐标以及高度值,确定所述待测物体的三维位置。
37、本技术实施例的第三方面提供了一种电子设备,包括存储器、处理器以及存储在所述存储器中并可在电子设备上运行的计算机程序,所述处理器执行所述计算机程序时实现第一方面提供的基于改进chan算法的三维定位方法的各步骤。
38、本技术实施例的第四方面提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现第一方面提供的基于改进chan算法的三维定位方法的各步骤。
39、本技术实施例提供的一种基于改进chan算法的三维定位方法、装置、电子设备及存储介质,具有以下有益效果:
40、本技术通过获取多个定位锚点相对于待测物体之间信号传播的到达时间数据;根据多个定位锚点相对于待测物体之间信号传播的到达时间数据,计算每个定位锚点与待测物体之间的距离值;根据每个定位锚点与待测物体之间的距离值,采用改进chan算法计算得到待测物体的二维平面坐标以及高度值;根据待测物体的二维平面坐标以及高度值,确定待测物体的三维位置。该方法适用于定位锚点布设于同一高度的场景,便于锚点安装,减少锚点遮挡,提高三维定位的准确性。
- 还没有人留言评论。精彩留言会获得点赞!