用于量化车辆横纵向操控行为与乘客驾乘体验之间关系的模型
本发明涉及学习算法,具体地,涉及一种用于量化车辆横纵向操控行为与乘客驾乘体验之间关系的模型。
背景技术:
1、在心理学领域,心理学家stevens提出了一种称为“stevens幂函数定律”的理论,用于量化人们的主观感受和外部刺激输入之间的关系。ao应用stevens的幂律来探索乘客的主观感受和客观评估之间的相关性。此外,该定律还被用于预测不适度,作为量化乘客舒适性指数的补充方法。作为一种基于机制的方法论,心理物理学方法具有较强的可解释性和稳定性。然而,在复杂的交通场景中,心理物理学方法往往表现出受限的表达能力。
2、在具备足够高质量的数据集的情况下,数据驱动方法能够开发出强大的机器学习模型,可以量化车辆操控行为引起的驾乘舒适性指标,luntian mou引入了一种基于注意力机制的卷积神经网络模型,称为长短期记忆(cnn-lstm)模型,用于评估驾驶员压力来表征舒适性指标。然而,基于学习的模型通常作为黑盒子运作,可解释性较低。
3、专利文献cn112109735a(cn202011141795.x)公开了一种考虑车辆舒适性的智能驾驶控制系统及方法,包括,手控启动单元,用于驾驶人手动启动自动驾驶的状态,并选择相应的驾驶模式;驾驶模式控制模块,包括防晕车模式控制模块;正常模式控制模块;目的地快到模式控制模块;自动驾驶控制单元,用于各种模式的自动驾驶控制;数据处理中心,用于处理并分析在人工驾驶时车载电脑会根据驾驶员的驾驶行为以及车辆信息,帮助在自动驾驶状态下选择合适的驾驶模式;车辆信息监测单元。然而该专利无法解决上述存在的技术问题。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种用于量化车辆横纵向操控行为与乘客驾乘体验之间关系的模型。
2、根据本发明提供的用于量化车辆横纵向操控行为与乘客驾乘体验之间关系的模型,包括:
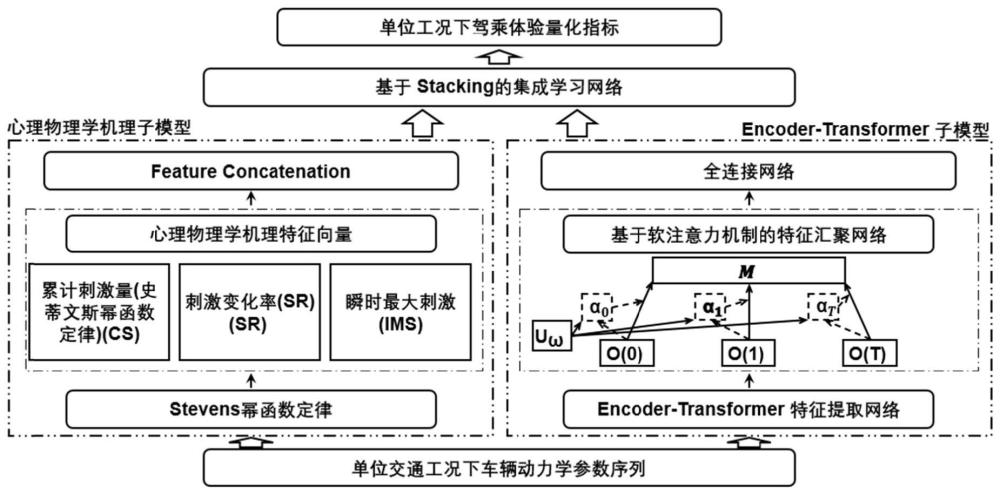
3、心理物理学机理子模型:基于心理物理学中的steven幂函数定律建立驾乘舒适性量化子模型,从输入参数中抽取特征向量,得到单位交通工况的累计刺激cs、单位工况内刺激变化率sr和单位交通工况内瞬时最大刺激ims;
4、数据驱动子模型:采用encoder-transformer模块、带遮蔽的软注意力机制和全连接层,定量分析不同车辆操作行为所产生的车辆动力学序列与乘客主观感受之间的关系;
5、集成学习模型:以心理物理学机理子模型的输出和数据驱动子模型的输出为输入,通过全连接网络融合两个子模型的输出,得到整个模型的输出结果,该结果为当前输入的车辆动力学序列所对应的驾乘舒适性的指标。
6、优选的,与车辆行为相关的车辆动力学特征定义为对乘客施加的外界刺激刺激,主观评价分数为心理变化的量化,表达式为:
7、s=b*iα
8、其中,s代表心理量,i代表物理量,α代表幂指数,b代表缩放系数;
9、车辆横纵向的动力学序列定义为外界刺激,表达形式如下:
10、
11、其中,δt表示刺激的持续时间,t表示刺激的起始点,a(t)表示车辆动力学序列,f表示特征投影关系。
12、优选的,采用固定长度的时间窗口来计算cs,通过交叉时间窗口ctw方法确定所选时间窗口在车辆动力学序列中的起始点对于车辆动力学参数序列的单个维度vdk(t),该序列被分成相等长度的δtcs,δt是ctw方法的步长,在第n步中,第一段的起始点向后移动n*δt,δtcs在下式中是δt的整数倍,因此,当第n步中第一段的起始点与第一步中第一段的终点匹配时,当前迭代的ctw将结束;
13、
14、其中,n表示ctw的步数,δtcs表示ctw的时间窗口宽度,是一个超参数,δt表示ctw的步长;
15、在ctw的第i步中,计算的第k维车辆动力学参数的累积刺激值是通过下对每个子序列进行计算得到的;
16、
17、其中,vdk(t)是时刻(t)车辆动力学参数序列的第k维参数,μk是vdk(t)的平均值,σk是vdk(t)的方差,k是维度索引,t是时间点,是幂指数,是一个可学习的参数,i是数据集中交通场景的索引,是选择的第i个交通场景的第k维参数的起始点;
18、在cs项的计算中,所选中的片段是以下方程中的最大项:
19、
20、其中,csk表示车辆动力学序列第k维的cs值。
21、优选的,δtsi被定义为vdk(t)最大值和最小值之间的持续时,表达式为:
22、
23、刺激变化率sr定义为一个交通工况下,车辆动力学参数序列的最大平均斜率,表达式为:
24、
25、其中,srk表示车辆动态序列的第k维度的sr值,幂指数是pcqm中的可学习参数。
26、优选的,瞬时最大刺激ims定义为整个交通工况内各个维度上车辆动力学参数序列的最大值,表达式为:
27、
28、其中,imsk表示车辆动态序列第k维度的ims值,幂指数可学习的参数。
29、优选的,将三个刺激量化项通过加权组合形成一个向量具体如下:
30、
31、其中,是可学习的项的权重,是车辆动力学序列第k个维度的外接刺激的主观心理量化结果;
32、在单个交通工况下,11维的车辆动力学参数序列所产生的刺激量化结果为:
33、
34、其中,是单个维度的车辆动力学参数序列的刺激量化值,g是一个可学习的参数化线性变换,用于增强模型的表达能力。
35、优选的,encoder-transformer模块将车辆动力学序列从输入矩阵映射为一个更高维的特征矩阵,然后由带遮蔽的softmax操作和软注意力汇聚层组成的带遮蔽软注意力层将高维特征矩阵汇聚为一个特征向量向量,该特征向量经过全连接层最终映射为一个具体的实数值,作为后续集成学习层的输入;
36、encoder-transformer模块由n个相同的层堆叠而成,每个层包含两个子层,第一子层是多头自注意力机制层,第二子层是基于位置的前馈神经网络ffn,每层之间添加残差连接增强模型的特征提取能力,然后进行层归一化,注意力函数将查询和一组键值对映射到一个输出,其中查询、键、值和输出都是向量,输出为值的加权和,其中给定值的权重由查询与相应键的注意力评分函数计算得出;
37、采用经过缩放的点积注意力,将一组查询打包成一个矩阵q,将键和值打包成矩阵k和v,输出矩阵的计算方式如下式所示:
38、
39、其中,dk是q的维度,kt是k的转置;
40、在多头注意力机制中,对于单个头的注意力计算,如下式所示:
41、hj=attention(wjq·q,wjk·k,wjv·v)
42、其中,hj是第i个注意力头的输出,{wjq,wjk,wjv}是可学习的权重矩阵;
43、不同的注意力机制头的输出沿着指定的维度进行拼接后,并通过另一个线性层wo进行投影,得到最终的输出,表达式为:
44、mh(q,k,v)=con(h1,h2,…,hj)·wo
45、其中,mh是多头注意力层的输出,j是注意力机制的头索引,con是连接的缩写,wo是可学习的权重矩阵。
46、优选的,encoder-transformer模块的输出mh(q,k,v)是一个序列{o(0),o(1),…,o(t)},输出的长度与输入序列相等,带遮蔽的软注意力层将序列{o(0),o(1),…,o(t)}映射为一维向量m,表达式为:
47、
48、其中,m是带遮蔽软注意力机制模块的输出,αit是经过遮蔽softmax预处理后在下式中计算得到的归一化权重,表达式为:
49、αit=ms(ut*uω)
50、其中,ms是带遮蔽的softmax操作,uω是一个具有可学习参数的随机初始化向量,ut是u的转置,u在下式中通过非线性变换计算得到:
51、u=tanh(wω*{o(0),o(1),…,o(t)}+bω)
52、其中,wω是可学习的权重矩阵。
53、优选的,经过注意力汇聚后得到的向量m被送入后续全连接层,产生数据驱动子模型的最终输出作为后续集成学习模块的输入参数;
54、数据驱动子模型的输入是车辆动力学参数序列vd,序列为十一维的二维矩阵,对于乘客驾乘体验量化模型,序列中的这些向量vd被视为查询、键和值;
55、vd≡q≡k≡v。
56、优选的,使用的元模型为的全连接网络,对应于网络结构图中的堆叠融合层,分别计算出的基本模型输出为和然后进行融合,表达式为:
57、
58、pcs是通过结合两个子模型得到的一个实数,该实数量的取值范围为0~5之间的数字,代表输入交通工况下的驾乘体验量化模型的输出指标,该值越接近5说明驾乘体验越好,越接近1说明驾乘体验越差。
59、与现有技术相比,本发明具有如下的有益效果:
60、(1)通过采用心理物理学方法,从心理学机理层面,建模了车辆操控行为与驾乘舒适性之间的定量关系,解决了驾乘舒适性量化过程中模型可解释性差的问题,提高了模型的可解释性;
61、(2)通过采用基于encoder-transfoemer的数据驱动方法,解决了单位交通工况内较长车辆动力学参数序列特征编码与汇聚困难的问题,提升了驾乘舒适性模型对长序列输入中前后依赖关系的建模能力;
62、(3)通过采用集成学习策略,融合了心理学模型的可解释性与数据驱动模型强大的表达能力,从而实现了同时具备强大特征表达能力与可解释的驾乘舒适性量化模型。
- 还没有人留言评论。精彩留言会获得点赞!