一种基于3D相机的监控保护方法、装置及相关设备与流程
本发明涉及3d相机的监控保护的,尤其是涉及一种基于3d相机的监控保护方法、装置及相关设备。
背景技术:
1、随着工业互联网的不断进步,越来越多的监控与报警的产品不断涌现,其中,以3d相机为代表的应用产品在监控与报警的技术领域占据主导地位,3d相机是一种能够捕捉物体深度信息的相机,通过基于3d相机来进行实现监控与保护的方案是非常适配的;
2、3d相机和背景之间均需要监控保护的场景,如果监控保护区延伸到背景,3d相机和背景之间只要有物体,就需要启动保护动作,因为检测精度的问题,部分背景测量点被测量落在保护区域内,导致误启动保护动作;
3、目前市面上通常解决的方案是在背景和监控保护区域边界之间设置一个固定的公差,但是问题是:若公差太小,则会受到背景的影响而误报,若公差太大,且公差内的入侵目标贴着背景或目标太小,则入侵物体不会被识别,则无法启动保护动作。
4、因此,针对上述问题本领域人员需要亟待解决。
技术实现思路
1、为了解决上述背景技术中提出的技术缺陷,本发明的目的是提供一种基于3d相机的监控保护方法、装置及相关设备,可有效的、精准的检测到入侵物品并及时作出相对应的保护动作。
2、本发明采用如下技术方案:
3、第一方面,本发明提供一种基于3d相机的监控保护方法,包括:
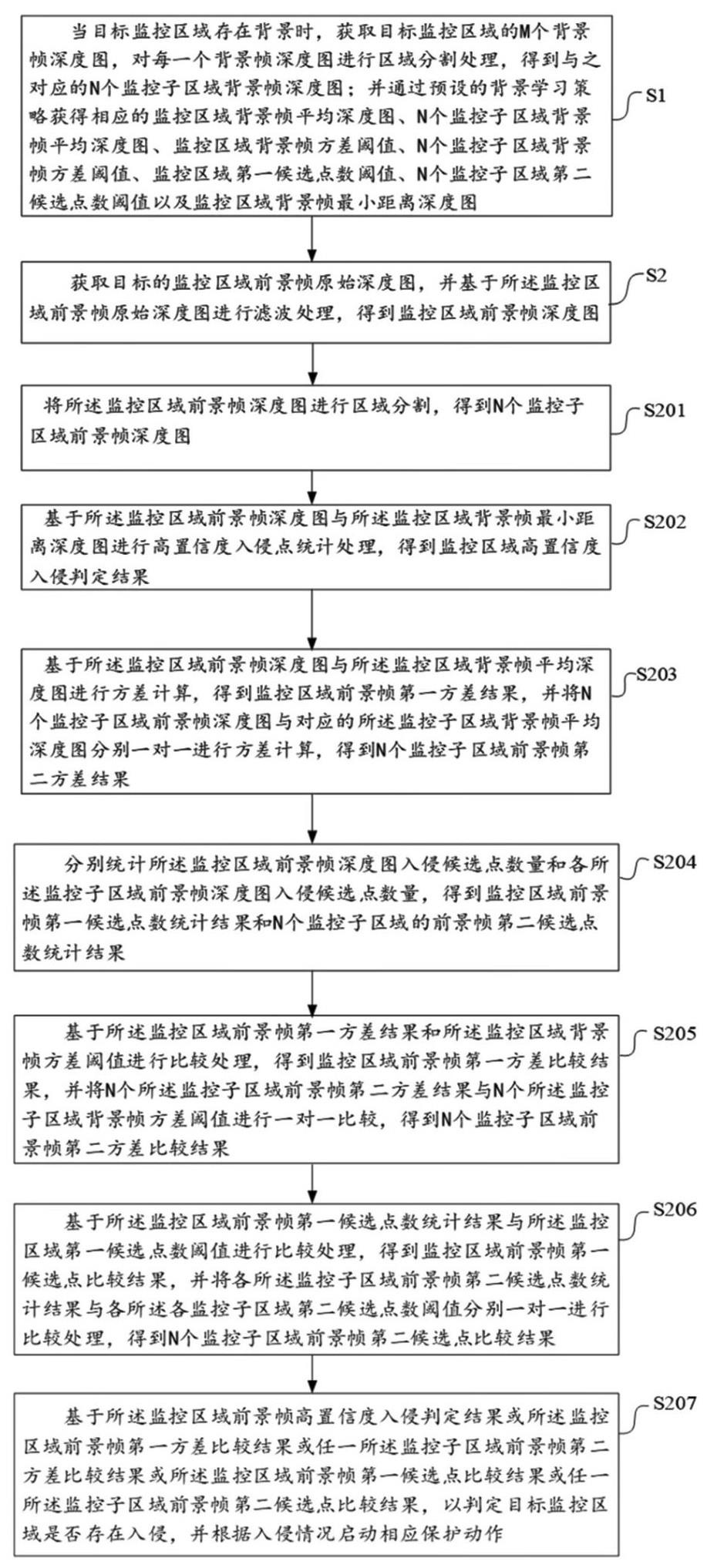
4、s1、当目标监控区域存在背景时,获取目标监控区域的m个背景帧深度图,对每一个背景帧深度图进行区域分割处理,得到与之对应的n个监控子区域背景帧深度图;并通过预设的背景学习策略获得相应的监控区域背景帧平均深度图、n个监控子区域背景帧平均深度图、监控区域背景帧方差阈值、n个监控子区域背景帧方差阈值、监控区域第一候选点数阈值、n个监控子区域第二候选点数阈值以及监控区域背景帧最小距离深度图;
5、s2、获取目标的监控区域前景帧原始深度图,并基于所述监控区域前景帧原始深度图进行滤波处理,得到监控区域前景帧深度图;
6、将所述监控区域前景帧深度图进行区域分割,得到n个监控子区域前景帧深度图;
7、基于所述监控区域前景帧深度图与所述监控区域背景帧最小距离深度图进行高置信度入侵点统计处理,得到监控区域高置信度入侵判定结果;
8、基于所述监控区域前景帧深度图与所述监控区域背景帧平均深度图进行方差计算,得到监控区域前景帧第一方差结果,并将n个监控子区域前景帧深度图与对应的所述监控子区域背景帧平均深度图分别一对一进行方差计算,得到n个监控子区域前景帧第二方差结果;
9、分别统计所述监控区域前景帧深度图入侵候选点数量和各所述监控子区域前景帧深度图入侵候选点数量,得到监控区域前景帧第一候选点数统计结果和n个监控子区域的前景帧第二候选点数统计结果;
10、基于所述监控区域前景帧第一方差结果和所述监控区域背景帧方差阈值进行比较处理,得到监控区域前景帧第一方差比较结果,并将n个所述监控子区域前景帧第二方差结果与n个所述监控子区域背景帧方差阈值进行一对一比较,得到n个监控子区域前景帧第二方差比较结果;
11、基于所述监控区域前景帧第一候选点数统计结果与所述监控区域第一候选点数阈值进行比较处理,得到监控区域前景帧第一候选点比较结果,并将各所述监控子区域前景帧第二候选点数统计结果与各所述各监控子区域第二候选点数阈值分别一对一进行比较处理,得到n个监控子区域前景帧第二候选点比较结果;
12、基于所述监控区域前景帧高置信度入侵判定结果或所述监控区域前景帧第一方差比较结果或任一所述监控子区域前景帧第二方差比较结果或所述监控区域前景帧第一候选点比较结果或任一所述监控子区域前景帧第二候选点比较结果,以判定目标监控区域是否存在入侵,并根据入侵情况启动相应保护动作。
13、可选的,所述预设的背景学习策略步骤,包括:
14、基于m个所述监控区域背景帧深度图和与之对应的n个监控子区域背景帧深度图计算得到监控区域背景帧平均深度图和与之对应的n个监控子区域背景帧平均深度图;
15、基于m个监控区域背景帧深度图和所述监控区域背景帧平均深度图计算以得到m个监控区域背景帧方差阈值,基于n个监控子区域背景帧深度图和与之对应的监控子区域背景帧平均深度图计算得到n个监控子区域背景帧方差阈值;
16、从m个监控区域背景帧深度图和与之对应的n个监控子区域的背景帧深度图中分别筛选出监控区域背景帧最小距离深度图和n个监控子区域背景帧最小距离深度图;
17、基于监控区域背景帧平均深度图和预设偏移距离的背景偏移深度图计算得到监控区域背景帧最近参考深度图,并计算m个所述监控区域背景帧深度图与所述监控区域背景帧最近参考深度图的差值,得到m个监控区域背景帧差值深度图;计算每一个监控区域背景帧差值深度图小于0的候选点的点数,并从中求得对应的m个监控区域背景帧候选点的点数的最大值,以及根据监控区域背景帧候选点的点数最大值中计算得到监控区域第一候选点数阈值;
18、基于n个监控子区域背景帧平均深度图和预设的n个对应的监控子区域背景偏移深度图计算得到n个监控子区域的最近参考深度图,并计算所述n个监控子区域背景帧深度图与对应的监控子区域最近参考深度图的差值,得到每个监控子区域的差值深度图;计算每个监控子区域的差值深度图小于0的候选点的点数,并从中求得对应的监控子区域的背景帧候选点的点数的最大值,以及根据该监控子区域的背景帧候选点的点数的最大值计算得到监控子区域第二候选点数阈值。
19、可选的,所述监控区域背景帧方差阈值和与之对应的n个监控子区域的背景帧方差阈值的计算步骤,包括:
20、分别预设监控区域背景帧方差阈值调节系数和n个监控子区域背景帧方差阈值调节系数;
21、基于每一个监控区域背景帧深度图与所述监控区域背景帧平均深度图进行方差计算,得到m个监控区域背景帧第一方差,并根据m个监控区域背景帧第一方差,确定监控区域背景帧深度图最大方差;
22、基于n个监控子区域背景帧深度图与所述监控子区域背景帧平均深度图进行方差计算,得到n个监控子区域的背景帧第二方差,并根据n个监控子区域背景帧第二方差,确定n个监控子区域背景帧深度图最大方差;
23、根据所述监控区域背景帧深度图最大方差与监控区域背景帧方差阈值调节系数进行相乘计算,得到监控区域背景帧方差阈值;
24、根据n个所述监控子区域背景帧深度图最大方差与n个所述监控子区域背景帧方差阈值调节系数进行一对一相乘计算,得到n个监控子区域背景帧方差阈值。
25、可选的,所述监控区域背景帧最小距离深度图和n个监控子区域背景帧最小距离深度图的筛选策略,包括:
26、基于m个所述监控区域背景帧深度图同一个位置的点进行距离测量计算,得到监控区域背景帧最小距离深度图;
27、基于n个所述监控子区域背景帧深度图同一个位置的点进行距离测量计算,得到n个监控子区域背景帧最小距离深度图。
28、可选的,所述监控区域第一候选点数阈值和m个监控子区域第二候选点数阈值的计算步骤,包括:
29、分别预设监控区域第一候选点数阈值系数和与之对应的n个监控子区域第二候选点数阈值系数;
30、基于m个所述监控区域背景帧差值深度图的候选点数进行统计处理,并根据从m个所述监控区域背景帧差值深度图的候选点数中计算出监控区域背景帧差值深度图的候选点数最大值,得到监控区域第一候选点数最大值;
31、基于n个所述监控子区域的m个差值深度图的候选点数进行统计处理,并根据从各个所述监控子区域的差值深度图的候选点数中计算出各个监控子区域深度图候选点数的最大值,以得到n个监控子区域第二候选点数最大值;
32、根据所述监控区域第一候选点数阈值系数与监控区域第一候选点数最大值进行相乘计算,得到监控区域第一候选点数阈值;
33、根据n个所述监控子区域第二候选点数阈值系数与n个监控子区域第二候选点数最大值一对一进行相乘计算,以得到n个监控子区域第二候选点数阈值。
34、可选的,所述目标监控区域入侵的判定步骤,包括:
35、若所述监控区域前景帧高置信度入侵判定结果标志位为true,或
36、所述监控区域前景帧第一方差结果大于所述监控区域背景帧方差阈值,或
37、任一所述监控子区域前景帧第二方差结果大于与之相对应的所述监控子区域背景帧方差阈值,或
38、所述监控区域前景帧第一候选点数统计结果大于所述监控区域第一候选点数阈值,或
39、任一所述监控子区域前景帧第二候选点数统计结果大于与之相对应的所述监控子区域第二候选点数阈值,则判定监控目标区域存在入侵。
40、第二方面,本发明提供一种基于3d相机的监控保护装置,包括:
41、获取模块:用于采集目标背景图像数据和实时采集目标前景图像数据;
42、滤波模块:用于为背景帧深度图和前景帧深度图进行滤波处理;
43、第一计算模块:用于分别计算监控区域背景帧方差阈值、监控子区域背景帧方差阈值、监控区域第一最小距离深度图、监控子区域第二最小距离深度图、监控区域第一候选点数阈值以及监控子区域第二候选点数阈值;
44、第二计算模块:用于分别计算监控区域前景帧高置信度入侵判定结果、监控区域前景帧第一方差结果、监控子区域前景帧第二方差结果、监控区域前景帧第一候选点数统计结果、监控子区域前景帧第二候选点数统计结果;
45、第一比较模块:用于将监控区域前景帧第一方差结果与监控区域背景帧方差阈值进行比较、监控子区域前景帧第二方差结果与监控子区域背景帧方差阈值进行比较;
46、第二比较模块:用于将监控区域前景帧第一候选点数统计结果与所述监控区域第一候选点数阈值进行比较、监控子区域前景帧第二候选点数统计结果与监控子区域第二候选点数阈值分别进行比较;
47、判断模块:用于将所述监控区域前景帧高置信度入侵判定结果进行true或false判断、所述监控区域前景帧第一方差结果与所述监控区域背景帧方差阈值进行判断、所述监控子区域前景帧第二方差结果与所述监控子区域背景帧方差阈值进行判断、所述监控区域前景帧第一候选点数统计结果与所述监控区域第一候选点数阈值进行判断、所述监控子区域前景帧第二候选点数统计结果与所述监控子区域第二候选点数阈值分别进行判断。
48、第三方面,本发明提供一种电子设备,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现本发明实施例提供的一种基于3d相机的监控保护方法中的步骤。
49、第四方面,本发明提供一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现本发明实施例提供的一种基于3d相机的监控保护方法中的步骤。
50、综上所述,本发明的有益效果为:
51、本发明首先通过监控目标区域的m个背景帧深度图,随即将监控区域背景帧深度图进行分割处理,得到与之对应的n个监控子区域背景帧深度图,通过上述分割处理,能够便于对监控区域的目标图像数据做特征分析,可以有效检测不同位置,不同尺寸的目标侵入,同时通过预设的背景学习策略获得相应的监控区域背景帧方差阈值、以及与之对应的n个监控子区域背景帧方差阈值、监控区域第一候选点数阈值、n个监控子区域第二候选点数阈值,能够便于对监控目标区域做特征进行分析,同时通过获取前景帧深度图,并将前景帧的深度图进行滤波处理,能够使其分析对比更加清晰和精准,同时分别计算滤波后的前景帧深度图的方差、入侵候选点数量以及进行高置信度入侵点处理,通过上述参数标准与背景学习策略的参数标准进行对比分析,通过这样的方式无需设置较大的公差进行计算,从而能够准确判定监控目标区域是否有物体入侵,从而避免了保护区和墙壁之间小尺寸物体入侵目标无法有效检测的问题,提高了检测的充分性、准确性和稳定性,进而能够根据物体入侵情况及时启动相应保护动作。
52、上述说明仅是本发明的技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!