钢结构的虚拟拼装方法、装置、设备及存储介质与流程
本发明涉及虚拟拼装,尤其涉及一种钢结构的虚拟拼装方法、装置、设备及存储介质。
背景技术:
1、钢结构一般都是在工厂制作完成构件,运输到建造现场安装组成的。为确保构件运到现场后能准确安装就位,一般需要在工厂进行实体预拼装以检验结构的可拼装性。工厂实体预拼装,就是将分段制造的大尺度柱、梁、桁架、支撑等钢构件和多层钢框架结构,特别是用高强度螺栓连接的大型钢结构,分块制造和供货的钢壳体结构等,在出厂前进行整体或分段分层临时性组装的作业过程。
2、目前,在钢结构的预装配工序中,人工预装配方法的应用较为广泛。即利用吊装设备将制作好的钢节段放置在依据理论数据绘制好的地样线内,工人对具有配合关系的钢箱节段进行栓接。
3、然而,人工预装配不仅需要耗费巨大的人力、物力和时间,此外还需要有足够大的场地。目前,虽然也有采用点云数据进行虚拟拼接的方法,但是拼装的精度较低,无法满足高拼装精度的要求。
技术实现思路
1、本发明实施例提供了一种钢结构的虚拟拼装方法、装置、设备及存储介质,以解决目前虚拟拼装的准确度较低的问题。
2、第一方面,本发明实施例提供了一种钢结构的虚拟拼装方法,包括:
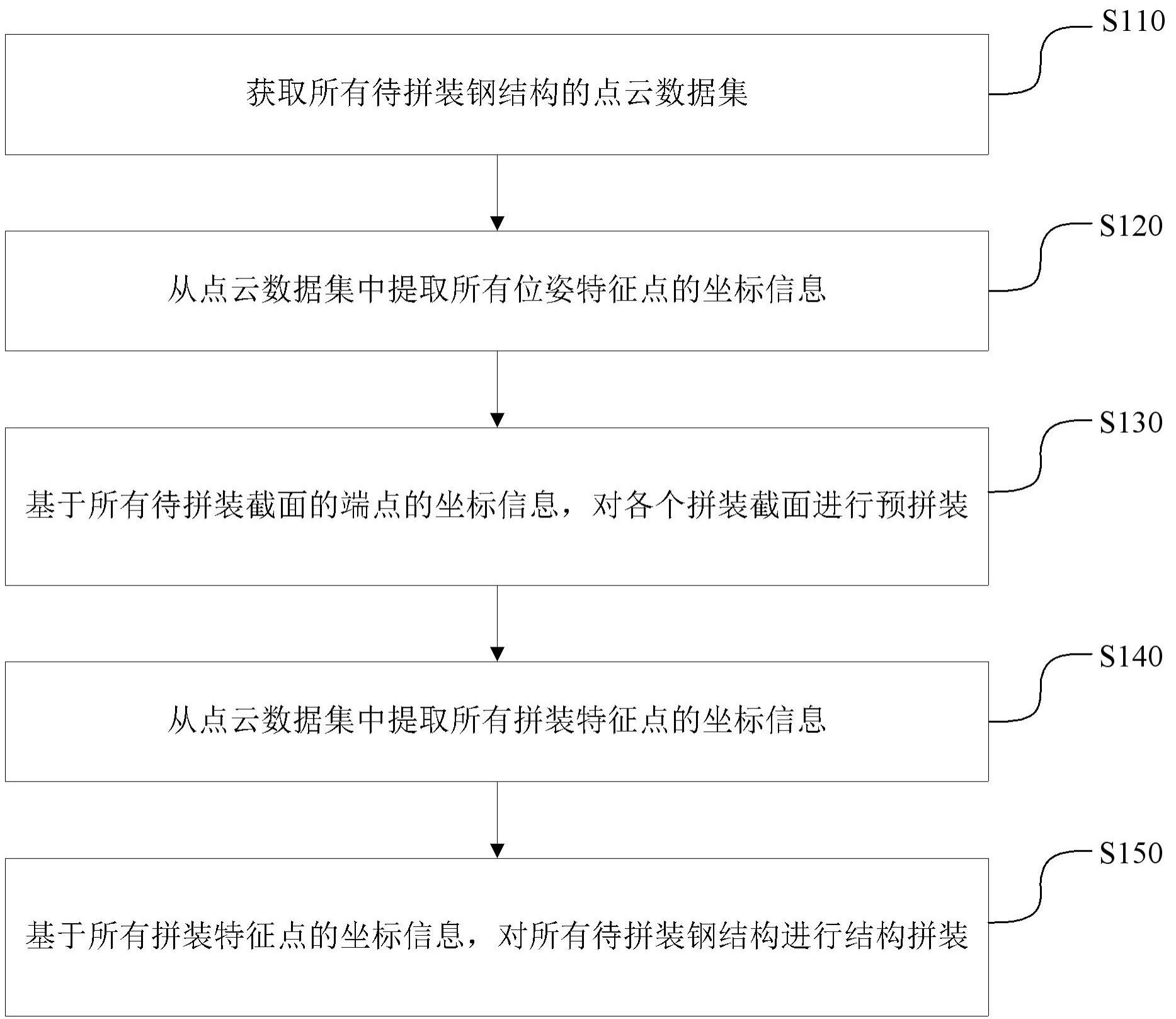
3、获取所有待拼装钢结构的点云数据集;
4、从点云数据集中提取所有位姿特征点的坐标信息,其中,位姿特征点为所有待拼装钢结构的各个待拼装截面的端点;
5、基于所有待拼装截面的端点的坐标信息,对各个拼装截面进行预拼装;
6、从点云数据集中提取所有拼装特征点的坐标信息,其中,拼装特征点为待拼装钢结构的端部侧面螺栓孔的孔心坐标,每个待拼装钢结构的端部侧面设置有多个对接螺栓孔;
7、基于所有拼装特征点的坐标信息,对所有待拼装钢结构进行结构拼装。
8、在一种可能的实现方式中,从点云数据集中提取所有位姿特征点的坐标信息,包括:
9、基于欧式聚类算法对点云数据集进行分割筛选处理,以筛选出各个待拼装截面的端点云数据集;
10、基于区域生长法对各个待拼装截面的端点云数据集进行平面分割处理,以确定位于不同目标平面的点云簇,其中,目标平面为任意一个平面;
11、基于随机采样一致性算法对所有不同目标平面的端点云簇进行拟合,以得到每个目标平面的平面方程;
12、基于所有目标平面的平面方程,确定所有位姿特征点的坐标信息。
13、在一种可能的实现方式中,基于所有目标平面的平面方程,确定所有位姿特征点的坐标信息,包括:
14、对所有平面方程进行排列组合形成平面方程组集,其中,平面方程组集包括多组方程,每组方程包括3个平面方程,每组方程均不相同;
15、基于目标组方程组成的系数矩阵的非零行的秩和预设值,从平面方程组集中筛选相交平面组集,其中,目标组方程为平面方程组集中的任意一组方程组;
16、对相交平面组集中的每组方程进行求解,确定所有位姿特征点的坐标信息。
17、在一种可能的实现方式中,从点云数据集中提取所有拼装特征点的坐标信息,包括:
18、将目标平面的点云簇向该目标平面对应的平面方程进行投影,得到目标平面的投影点云簇;
19、对目标平面的投影点云簇进行提取拟合,确定目标平面上的螺栓孔的圆形边界点云数据;
20、对所有目标平面上的螺栓孔的圆形边界点云数据进行拟合处理,得到所有螺栓孔的孔心坐标。
21、在一种可能的实现方式中,对目标平面的投影点云簇进行提取拟合,确定目标平面上的螺栓孔的圆形边界点云数据,包括:
22、基于alpha shapes 算法,对目标平面的投影点云簇进行提取拟合,确定目标平面上的螺栓孔的圆形边界点云数据。
23、在一种可能的实现方式中,对所有目标平面上的螺栓孔的圆形边界点云数据进行拟合处理,得到所有螺栓孔的孔心坐标,包括:
24、基于随机采样一致性算法,对所有目标平面上的螺栓孔的圆形边界点云数据进行拟合处理,得到所有螺栓孔的孔心坐标。
25、在一种可能的实现方式中,基于所有拼装特征点的坐标信息,对待拼装钢结构进行结构拼装,包括:
26、基于提取的需要拼接的两个待拼装钢结构上的每组对应螺栓孔的孔心坐标在xyz方向上的差值,构建差值矩阵;
27、计算差值矩阵的frobenius范数的最小值,确定对应连接的两个螺栓孔的孔心坐标在xyz方向上的移动距离;
28、基于移动距离,对该待拼装钢结构进行结构拼装。
29、第二方面,本发明实施例提供了一种钢结构的虚拟拼装装置,包括:
30、获取数据模块,用于获取所有待拼装钢结构的点云数据集;
31、位姿信息提取模块,用于从点云数据集中提取所有位姿特征点的坐标信息,其中,位姿特征点为所有待拼装钢结构的各个待拼装截面的端点;
32、预拼装模块,用于基于所有待拼装截面的端点的坐标信息,对各个拼装截面进行预拼装;
33、拼装信息提取模块,用于从点云数据集中提取所有拼装特征点的坐标信息,其中,拼装特征点为待拼装钢结构的端部侧面螺栓孔的孔心坐标,每个待拼装钢结构的端部侧面设置有多个对接螺栓孔;
34、拼装模块,用于基于所有拼装特征点的坐标信息,对所有待拼装钢结构进行结构拼装。
35、在一种可能的实现方式中,位姿信息提取模块,用于基于欧式聚类算法对点云数据集进行分割筛选处理,以筛选出各个待拼装截面的端点云数据集;
36、基于区域生长法对各个待拼装截面的端点云数据集进行平面分割处理,以确定位于不同目标平面的点云簇,其中,目标平面为任意一个平面;
37、基于随机采样一致性算法对所有不同目标平面的端点云簇进行拟合,以得到每个目标平面的平面方程;
38、基于所有目标平面的平面方程,确定所有位姿特征点的坐标信息。
39、在一种可能的实现方式中,位姿信息提取模块,用于对所有平面方程进行排列组合形成平面方程组集,其中,平面方程组集包括多组方程,每组方程包括3个平面方程,每组方程均不相同;
40、基于目标组方程组成的系数矩阵的非零行的秩和预设值,从平面方程组集中筛选相交平面组集,其中,目标组方程为平面方程组集中的任意一组方程组;
41、对相交平面组集中的每组方程进行求解,确定所有位姿特征点的坐标信息。
42、在一种可能的实现方式中,拼装信息提取模块,用于将目标平面的点云簇向该目标平面对应的平面方程进行投影,得到目标平面的投影点云簇;
43、对目标平面的投影点云簇进行提取拟合,确定目标平面上的螺栓孔的圆形边界点云数据;
44、对所有目标平面上的螺栓孔的圆形边界点云数据进行拟合处理,得到所有螺栓孔的孔心坐标。
45、在一种可能的实现方式中,拼装信息提取模块,用于基于alpha shapes 算法,对目标平面的投影点云簇进行提取拟合,确定目标平面上的螺栓孔的圆形边界点云数据。
46、在一种可能的实现方式中,拼装信息提取模块,用于基于随机采样一致性算法,对所有目标平面上的螺栓孔的圆形边界点云数据进行拟合处理,得到所有螺栓孔的孔心坐标。
47、在一种可能的实现方式中,拼装模块,用于基于提取的需要拼接的两个待拼装钢结构上的每组对应螺栓孔的孔心坐标在xyz方向上的差值,构建差值矩阵;
48、计算差值矩阵的frobenius范数的最小值,确定对应连接的两个螺栓孔的孔心坐标在xyz方向上的移动距离;
49、基于移动距离,对该待拼装钢结构进行结构拼装。
50、第三方面,本发明实施例提供了一种电子设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上第一方面或第一方面的任一种可能的实现方式所述方法的步骤。
51、第四方面,本发明实施例提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上第一方面或第一方面的任一种可能的实现方式所述方法的步骤。
52、本发明实施例提供一种钢结构的虚拟拼装方法、装置、设备及存储介质,首先,获取所有待拼装钢结构的点云数据集,然后,从点云数据集中提取所有位姿特征点的坐标信息。接着,基于所有待拼装截面的端点的坐标信息,对各个拼装截面进行预拼装。次之,从点云数据集中提取所有拼装特征点的坐标信息。最后,基于所有拼装特征点的坐标信息,对所有待拼装钢结构进行结构拼装。通过考虑位姿特征点和拼装特征点,可以使得拼装过程更加贴近工程实际,即使钢结构存在制造误差,仍然可以基于拼装特征点实现精准拼装。
- 还没有人留言评论。精彩留言会获得点赞!