一种反光物体识别方法及装置与流程
本发明涉及反光识别领域,尤其涉及一种反光物体识别方法及装置。
背景技术:
1、无人搬运机器人(automated guided vehicle,agv)作为仓储物流自动化生产中的重要运输工具。其中,agv的导航定位是在仓储物流自动化运输过程中的重要技术,常见的工业agv导航定位方式有磁导航、激光导航、二维码导航等。其中基于反光柱与反光板的激光导航由于其定位精度高,维护成本低,安装方便且成本相对较低,在agv方面应用范围较多。
2、反光板和反光柱在识别距离和可识别角度范围上具有一定的区别,在综合使用便捷性及定位识别稳定性等因素后反光板与反光柱两者会结合使用,可以agv导航定位精度。
3、但是在现有技术中,无法识别反光物体的形状,也就无法对反光板和反光柱进行区分,从而导致在agv导航定位的精度较差。
技术实现思路
1、本发明提供了一种反光物体识别方法及装置,以解决目前无法识别反光物体的形状而导致在agv导航定位的精度不高的问题。
2、第一方面,本技术提供了一种反光物体识别方法,包括:
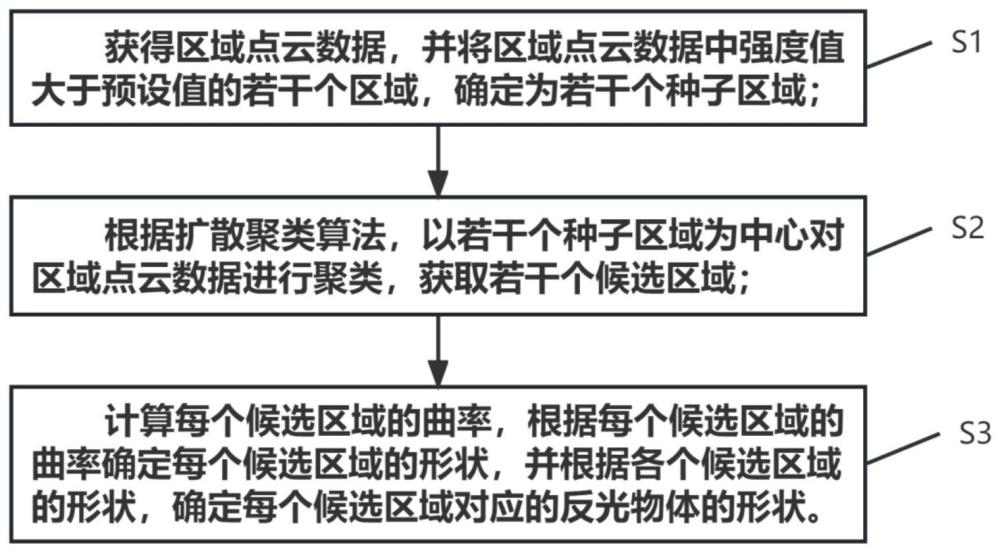
3、获得区域点云数据,并将区域点云数据中强度值大于预设值的若干个区域,确定为若干个种子区域;
4、根据扩散聚类算法,以若干个种子区域为中心对区域点云数据进行聚类,获取若干个候选区域;
5、计算每个候选区域的曲率,根据每个候选区域的曲率确定每个候选区域的形状,并根据各个候选区域的形状,确定每个候选区域对应的反光物体的形状。
6、这样根据点云数据中强度值确定种子区域,可以准确获取反光率高的区域。根据反光板和反光柱的反光特性准确的定位反光物件的反光点。且在上述准确得到反光点时,可以准确的确定聚类的中心,排除了一般聚类算法由于中心点确定不准确而导致的聚类结果不清楚的问题。通过扩散聚类算法对各个反光点进行扩散,可以获取清晰的候选区域范围,其中扩散聚类算法不同于一般的聚类算法,扩散聚类算法不需要将区域点云数据中所有的点进行分类或聚类,而是以种子区域对外进行扩散,这样可以排除其他聚类算法中由于是对全部点进行聚类而导致的候选区域不清晰的问题。进一步的,通过每个候选区域的曲率来确定各个候选区域的形状,这样可以简单便捷的对候选区域的形状进行识别,减少对于硬件设备的负担同时又提高了准确性。
7、进一步的,在根据各个候选区域的形状,确定每个候选区域对应的反光物体的形状,之后包括:
8、当存在候选区域的形状为反光柱时,则根据最小二乘圆拟合法对候选区域进行拟合,获得所述反光柱的圆心位置;
9、当存在候选区域的形状为反光板时,则根据最小二乘直线拟合法对候选区域进行拟合,获得所述反光板的中点位置和法向角。
10、这样根据候选区域的形状采用对应的最小乘法,实现对反光柱和反光板的圆心和中心的确定。可以简化点云中的反光板与反光柱识别定位流程,增强反光板与反光柱识别方法的适应性及实时性。
11、进一步的,所述获得区域点云数据,具体为:
12、根据雷达探测装置获得雷达点云数据,并根据雷达探测装置的识别距离,消除雷达点云数据中超出识别距离的点云数据;
13、根据agv的实时运动数据,对雷达点云数据进行校准,获得区域点云数据。
14、将超出识别距离的点云数据从雷达点云数据中消除,可以排除精度不高的点云数据,降低噪点对后续识别的干扰,且减少了后续需要识别处理的点云数据的数据量增加了数据处理的效率和后续图像识别的实时性。
15、这样根据轮速计等agv的实时运动数据来校正雷达点云数据,可以排除由于agv的运动而导致采集到的数据出现误差。
16、进一步的,所述将区域点云数据中强度值大于预设值的若干个区域,确定为若干个种子区域,具体为:
17、确定区域点云数据中点云数据的反射率大于雷达探测装置标定值的第一点云数据,并将相连接的第一点云数据确定为一个种子区域。
18、这样确定种子区域,可以保证种子区域的反射率比非种子区域大,从而精确的对反光物体进行定位,且可以在后续根据种子区域进行扩散聚类时不会遗漏可能存在的候选区域。
19、进一步的,所述根据扩散聚类算法,以若干个种子区域为中心对区域点云数据进行聚类,获取若干个候选区域,具体为:
20、将各个种子区域确定为聚类中的若干个中心区域,持续判断各个中心区域边界点外围连接的点云数据的强度值与中心区域边界点强度值的差值是否小于预设强度差,直至不存在中心区域边界点连接的非中心区域的点云数据的强度值与中心区域边界点强度值的差值小于预设强度差时,确定各个中心区域为对应的候选区域;
21、其中,每次判断中若存在中心区域边界点连接的非中心区域的点云数据的强度值与中心区域边界点强度值的差值小于预设强度差,则将所述非中心区域的点云数据加入中心区域。
22、这样通过扩散聚类算法来对种子区域进行扩散,可以准确的得到候选区域的轮廓和尺寸,且每次通过判断边界点和内部点的差值来扩大中心区域,可以防止反光度低的点加入候选区域。
23、进一步的,所述计算每个候选区域的曲率,根据每个候选区域的曲率确定每个候选区域的形状,具体为:
24、根据各个候选区域长边,将每个候选区域中所有点云数据拆分为上部分和下部分;
25、根据每个候选区域中点云数据的位置信息,分别计算每个候选区域中上部分和下部分的斜率,并计算每个候选区域中上部分和下部分的斜率差值;
26、判断每个候选区域中上部分和下部分的斜率差值是否大于预设差值;
27、若存在候选区域中上部分和下部分的斜率差值小于等于预设差值,则确定所述候选区域的形状为反光板;
28、若存在候选区域中上部分和下部分的斜率差值大于预设差值,则确定所述候选区域的形状为反光柱。
29、这样根据计算各个候选区域的斜率可以简单快捷的对候选区域的形状进行识别,减少设备在反光物体识别上的算力消耗,在保证准确率的情况下增加对反光物体的识别速度,做到对反光板和反光柱的识别,从而结合反光柱和反光板各自的优势保证avg导航定位可靠性。
30、进一步的,在所述根据扩散聚类算法,以若干个种子区域为中心对区域点云数据进行聚类,获取若干个候选区域,之后包括:
31、判断各个候选区域的尺寸是否满足预设的尺寸范围;
32、若存在候选区域的尺寸不满足预设的尺寸范围,则确定所述候选区域为无效区域;
33、若存在候选区域的尺寸满足预设的尺寸范围,则确定所述候选区域为最终的候选区域。
34、通过设定预设的尺寸范围,从而排除误将玻璃、不锈钢等强反射物识别为候选区域的情况。这样可以实现排除杂物的干扰,更加准确获取需要定位的反光物体。
35、第二方面,本技术提供了一种反光物体识别装置,包括:种子区域模块、候选区域模块和形状确定模块;
36、所述种子区域模块用于获得区域点云数据,并将区域点云数据中强度值大于预设值的若干个区域,确定为若干个种子区域;
37、所述候选区域模块用于根据扩散聚类算法,以若干个种子区域为中心对区域点云数据进行聚类,获取若干个候选区域;
38、所述形状确定模块用于计算每个候选区域的曲率,根据每个候选区域的曲率确定每个候选区域的形状,并根据各个候选区域的形状,确定每个候选区域对应的反光物体的形状。
39、进一步的,所述反光物体识别装置,还包括:圆心确定模块和中点确定模块;
40、所述圆心确定模块用于当存在候选区域的形状为反光柱时,则根据最小二乘圆拟合法对候选区域进行拟合,获得所述反光柱的圆心位置;
41、所述中点确定模块用于当存在候选区域的形状为反光板时,则根据最小二乘直线拟合法对候选区域进行拟合,获得所述反光板的中点位置和法向角。
42、进一步的,所述种子区域模块包括雷达点云数据单元和区域点云数据单元;
43、所述雷达点云数据单元用于根据雷达探测装置获得雷达点云数据,并根据雷达探测装置的识别距离,消除雷达点云数据中超出识别距离的点云数据;
44、所述区域点云数据单元用于根据agv的实时运动数据,对雷达点云数据进行校准,获得区域点云数据。
45、进一步的,所述种子区域模块包括种子区域确定单元;
46、所述种子区域确定单元用于确定区域点云数据中点云数据的反射率大于雷达探测装置标定值的第一点云数据,并将相连接的第一点云数据确定为一个种子区域。
47、进一步的,所述候选区域模块包括:持续判断单元;
48、所述持续判断单元用于将各个种子区域确定为聚类中的若干个中心区域,持续判断各个中心区域边界点外围连接的点云数据的强度值与中心区域边界点强度差值是否小于预设强度差,直至不存在中心区域边界点连接的非中心区域的点云数据的强度值与中心区域边界点强度差值小于预设强度差时,确定各个中心区域为对应的候选区域;
49、其中,每次判断中若存在中心区域边界点连接的非中心区域的点云数据的强度值与中心区域边界点强度差值小于预设强度差,则将所述非中心区域的点云数据加入中心区域。
50、进一步的,所述形状确定模块包括:拆分单元、斜率单元、第一判断单元和形状识别单元;
51、所述拆分单元用于根据各个候选区域长边,将每个候选区域中所有点云数据拆分为上部分和下部分;
52、所述斜率单元用于根据每个候选区域中点云数据的位置信息,分别计算每个候选区域中上部分和下部分的斜率,并计算每个候选区域中上部分和下部分的斜率差值;
53、所述第一判断单元用于判断每个候选区域中上部分和下部分的斜率差值是否大于预设差值;
54、所述形状识别单元用于当第一判断单元确定存在候选区域中上部分和下部分的斜率差值小于等于预设差值时,确定所述候选区域的形状为反光板;
55、所述形状识别单元还用于当第一判断单元确定存在候选区域中上部分和下部分的斜率差值大于预设差值时,确定所述候选区域的形状为反光柱。
56、进一步的,所述反光物体识别装置还包括:第二判断模块和候选区域确定模块;
57、所述第二判断模块用于判断各个候选区域的尺寸是否满足预设的尺寸范围;
58、所述候选区域确定模块用于当第二判断模块确定存在候选区域的尺寸不满足预设的尺寸范围时,确定所述候选区域为无效区域;
59、所述候选区域确定模块还用于当第二判断模块确定存在候选区域的尺寸满足预设的尺寸范围时,所述候选区域为最终的候选区域。
60、这样根据点云数据中强度值确定种子区域,可以准确获取反光率高的区域。根据反光板和反光柱的反光特性准确的定位反光物件的反光点。且在上述准确得到反光点时,可以准确的确定聚类的中心,排除了一般聚类算法由于中心点确定不准确而导致的聚类结果不清楚的问题。通过扩散聚类算法对各个反光点进行扩散,可以获取清晰的候选区域范围,其中扩散聚类算法不同于一般的聚类算法,扩散聚类算法不需要将区域点云数据中所有的点进行分类或聚类,而是以种子区域对外进行扩散,这样可以排除其他聚类算法中由于是对全部点进行聚类而导致的候选区域不清晰的问题。进一步的,通过每个候选区域的曲率来确定各个候选区域的形状,这样可以简单便捷的对候选区域的形状进行识别,减少对于硬件设备的负担同时又提高了准确性。
- 还没有人留言评论。精彩留言会获得点赞!