本发明属于激光雷达点云数据处理领域。具体地,涉及融合dom影像和三维实景模型的机载lidar点云地面点提取方法、装置、电子产品和计算机可读存储介质。
背景技术:
1、地面高程点作为地形测绘中的重要信息,其精度和点密度会对后续设计、施工具有重要影响。山区高差大、陡峭、人员通行困难、作业安全性差,通过实测作业效率低、成本高。航空摄影测量技术又无法获取植被覆盖区域地面高程值。而机载lidar扫描技术对植被具有一定的穿透性,且受地形、交通情况限制小,可以快速获取目标区域完整的三维点云数据。因此,就目前技术手段而言,机载lidar扫描技术为快速获取地面点的首选,其优势明显,具有不可替代性。
2、通过机载lidar扫描技术获取的原始lidar点云数据中,除包含地面点外,还包括建筑物、植被等地物点,需分类后才能获取地面点成果。目前lidar点云分类方法大多为数学方面的滤波算法思想,基于距离和角度进行迭代运算。
3、但是,这些分类方法在坡坎处普遍存在局限性。首先,这些方法的成果精度受距离、角度阈值影响大,针对不同坡度、不同地表情况,需设置不同阈值,存在通用性差的问题。其次,针对复杂的自然地貌很难精细划分区域并设置合适阈值。一方面设置阈值过小会导致地面点错分至地物点,造成成果数据缺漏,关键地形信息缺失;另一方面阈值过大会导致地物点(如建筑物墙体、树干等)错分为地面点,使地形出现异常起伏,扭曲真实地形信息。由于阈值选取不当普遍存在错分类的问题。第三,由于这些分类方法中的分类基准面受参数设置影响大,网格尺寸、边界等不同而具有很大随机性,难以反应地形基本的真实起伏情况,在坡坎等地表坡度发生突然变化的区域,普遍存在地面点未识别的数据缺漏问题。第四,目前机载lidar点云分类结果存在一定程度的高程偏差。综上,目前的lidar点云分类算法难以满足地面点提取的需求。
技术实现思路
1、有鉴于此,本发明的目的在于实现一种机载lidar点云地面点提取方法,以解决上述背景技术中的坡坎处阈值选取困难、阈值选取不当引起错分类、分类基准面的随机性而导致的数据缺漏、以及分类结果中存在高程偏差等问题。
2、为实现上述目的,第一方面,本发明提供了一种融合dom影像和三维实景模型的机载lidar点云地面点提取方法,包括:
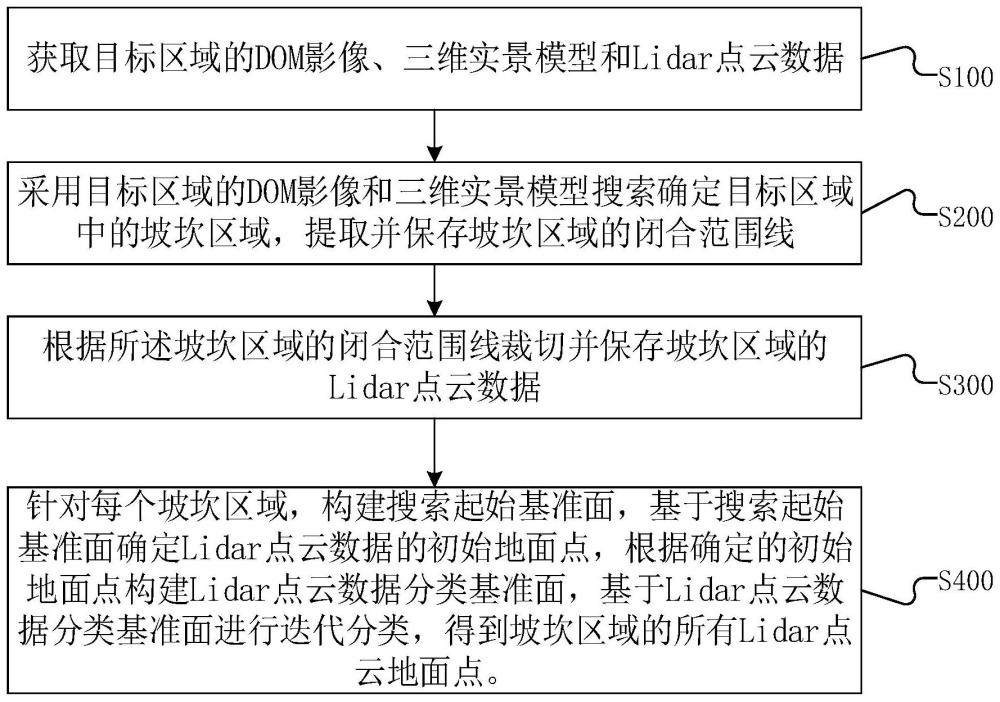
3、获取目标区域的dom影像、三维实景模型和lidar点云数据,所述dom影像、三维实景模型和lidar点云数据具有相同的坐标系统和高程系统并且范围一致;
4、采用目标区域的dom影像和三维实景模型,搜索确定目标区域中的坡坎区域,提取并保存坡坎区域的闭合范围线;
5、根据所述坡坎区域的闭合范围线裁切并保存坡坎区域的lidar点云数据;
6、针对每个坡坎区域,构建搜索起始基准面,基于搜索起始基准面确定lidar点云数据的初始地面点,根据确定的初始地面点构建lidar点云数据分类基准面,基于lidar点云数据分类基准面进行迭代分类,得到坡坎区域的所有lidar点云地面点。
7、本发明一些实施例中,dom影像的获取,是将机载摄影机获取到的原始照片数据、pos数据以及像控点数据,通过处理而获得的具有真实地理坐标的dom影像数据;三维实景模型的获取,是将无人机获取到的原始照片数据、pos数据以及像控点数据,通过处理而获得的具有真实地理坐标的高精度的三维实景模型;lidar点云数据的获取,是将获取到的机载lidar点云实测数据通过轨迹解算、航带拼接、坐标转换而得到。
8、本发明一些实施例中,根据目标区域的dom影像的纹理信息和三维实景模型的地表起伏度进行搜索,按照预先设置的缓冲区半径,提取并保存坡坎区域的闭合范围线,所述缓冲区半径是为了弥补闭合范围线确定误差带来的点云分类成果缺漏而设置的闭合范围线冗余量。
9、本发明一些实施例中,所述构建搜索起始基准面,具体地,先通过滤波算法将三维实景模型表面的地物进行剔除,然后根据三维实景模型中坡坎区域的坡度数据和位置数据,构建所述坡坎区域的搜索起始基准面,所述搜索起始基准面为坡度与三维实景模型相同的数学面,空间位置根据lidar点云数据高程值集中区域确定。
10、本发明一些实施例中,基于搜索起始基准面确定lidar点云数据的初始地面点包括:若坡坎区域内,lidar点云数据与搜索基准面的距离在预设的平坦阈值范围内,则lidar点云数据高程值最低的点为初始地面点;否则,在坡坎区域内基于lidar点云数据与构建的搜索起始基准面的位置进行搜索:若lidar点云数据完全位于搜索起始基准面的一侧,则距离基准面垂直距离最近的为初始地面点;若lidar点云数据完全位于搜索起始基准面的两侧,先区分出搜索起始基准面的地物侧和地面侧,将地面侧中距离基准面最远的点为初始地面点;此外,在搜索起始基准面坡度变化处,以过转折点的铅垂线为搜索参照线,寻找靠近搜索参照线的最低的lidar点云数据作为初始地面点。
11、本发明一些实施例中,根据确定的初始地面点构建lidar点云数据分类基准面,由所有初始地面点构成tin网格,所述tin网格作为lidar点云数据分类基准面。
12、本发明一些实施例中,基于lidar点云数据分类基准面进行迭代分类包括:对于每个lidar点云数据,判断其距离lidar点云数据分类基准面的垂直距离和角度是否满足判定条件,若满足条件则分类为地面点,同时将该地面点加入lidar点云数据分类基准面中,即更新lidar点云数据分类基准面,遍历所有lidar点云数据进行上述处理,分类的同时迭代更新lidar点云数据分类基准面,直至遍历全部点云,完成分类;所述判定条件是在预设距离阈值和角度阈值限定的范围内。
13、第二方面,本发明提供了一种融合dom影像和三维实景模型的机载lidar点云地面点提取装置,包括:
14、数据获取单元,该单元用于获取目标区域的dom影像、三维实景模型和lidar点云数据,所述dom影像、三维实景模型和lidar点云数据具有相同的坐标系统和高程系统并且范围一致;
15、坡坎区域确定单元,该单元用于采用目标区域的dom影像和三维实景模型,搜索确定目标区域中的坡坎区域,提取并保存坡坎区域的闭合范围线;
16、数据裁切单元,该单元用于根据所述坡坎区域的闭合范围线裁切并保存坡坎区域的lidar点云数据;
17、地面点提取单元,该单元用于针对每个坡坎区域,构建搜索起始基准面,基于搜索起始基准面确定lidar点云数据的初始地面点,根据确定的初始地面点构建lidar点云数据分类基准面,基于lidar点云数据分类基准面进行迭代分类,得到坡坎区域的所有lidar点云地面点。
18、第三方面,本发明提供了一种电子产品,包括:至少一个处理器;以及,与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有能被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行所述的融合dom影像和三维实景模型的机载lidar点云地面点提取方法。
19、第四方面,本发明提供了一种计算机可读存储介质,存储有计算机程序,其中,所述计算机程序被处理器执行时实现所述的融合dom影像和三维实景模型的机载lidar点云地面点提取方法。
20、有益效果
21、相较于传统的lidar点云分类方法,本发明融合高精度正射影像和三维实景模型对lidar点云进行分类,具有以下有益效果:
22、(1)根据目标区域纹理和坡度信息,判断坡坎区域,对项目区实行精准分区处理,可以节省数据处理时间,提高数据处理效率,避免常规区域数据融合对时间的浪费。
23、(2)采用三维实景模型的坡度面作为起始基准面,依据距离确定基准点,并增加坡度转折处的特征基准点,构建了最大限度贴合地表的点云分类基准面,可确保坡顶和坡底特征点的完整,提高点云分类的准确度。