区域监控方法、装置、电子设备及电子围栏系统
本发明涉及机器视觉,尤其涉及一种区域监控方法、装置、电子设备及电子围栏系统。
背景技术:
1、电子围栏(electronic fence)系统是一种周界防盗报警系统,被广泛应用于各类有围墙或需要围墙的场所。
2、通常情况下,传统的电子围栏系统由电子围栏主机和前端探测围栏组成。但是,在传统的电子围栏系统应用于耕地、牧区、林区或湿地等大面积区域的监控保护的情况下,若围绕着大面积区域的边界设置前端探测围栏,则需要投入巨大的设备成本以及后期维护成本。并且,在上述大面积区域的边界发生变更的情况下,还需要重新设置前端探测围栏,或对已设置的前端探测围栏的位置进行变更,对上述大面积区域进行监控保护的灵活度不高。因此,如何更低成本、更灵活地对大面积区域进行监控保护,是本领域亟待解决的技术问题。
技术实现思路
1、本发明提供一种区域监控方法、装置、电子设备及电子围栏系统,用以解决现有技术中对大面积区域进行监控保护时所需投入的成本较高且灵活度不高的缺陷,实现更低成本、更灵活地对大面积区域进行监控保护。
2、本发明提供一种区域监控方法,包括:
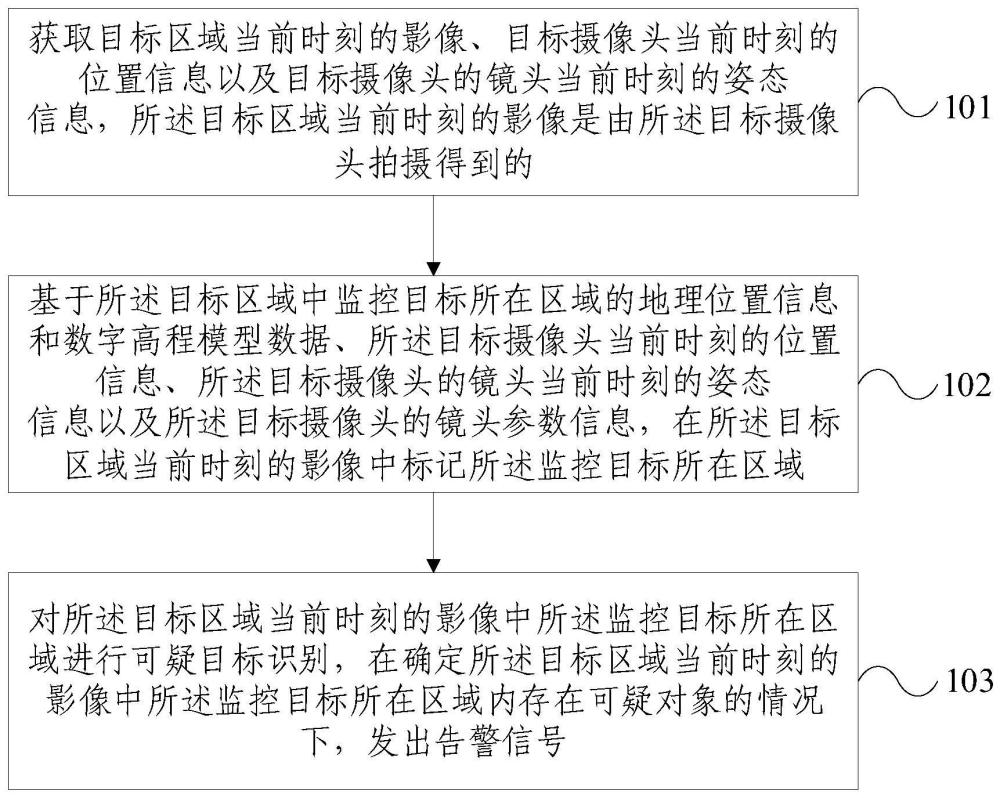
3、获取目标区域当前时刻的影像、目标摄像头当前时刻的位置信息以及目标摄像头的镜头当前时刻的姿态信息,所述目标区域当前时刻的影像是由所述目标摄像头拍摄得到的;
4、基于所述目标区域中监控目标所在区域的地理位置信息和数字高程模型数据、所述目标摄像头当前时刻的位置信息、所述目标摄像头的镜头当前时刻的姿态信息以及所述目标摄像头的镜头参数信息,在所述目标区域当前时刻的影像中标记所述监控目标所在区域;
5、对所述目标区域当前时刻的影像中所述监控目标所在区域进行可疑目标识别,在确定所述目标区域当前时刻的影像中所述监控目标所在区域内存在可疑对象的情况下,发出告警信号。
6、根据本发明提供的一种区域监控方法,所述基于所述目标区域中监控目标所在区域的地理位置信息和数字高程模型数据、所述目标摄像头当前时刻的位置信息、所述目标摄像头的镜头当前时刻的姿态信息以及所述目标摄像头的镜头参数信息,在所述目标区域当前时刻的影像中标记所述监控目标所在区域,包括:
7、基于所述目标摄像头当前时刻的位置信息,或者基于所述目标摄像头当前时刻的位置信息和所述目标摄像头的镜头当前时刻的姿态信息,在所述目标区域中监控目标所在区域的地理位置信息和数字高程模型数据中确定所述目标区域当前时刻的影像对应的目标地理位置信息和目标数字高程模型数据;
8、基于所述目标数字高程模型数据、所述目标地理位置信息、所述目标摄像头的镜头当前时刻的姿态信息以及所述目标摄像头的镜头参数信息,获取所述目标地理位置信息对应的像素坐标值;
9、基于所述目标地理位置信息对应的像素坐标值,在所述目标区域当前时刻的影像中标记所述监控目标所在区域。
10、根据本发明提供的一种区域监控方法,所述基于所述目标数字高程模型数据、所述目标地理位置信息、所述目标摄像头的镜头当前时刻的姿态信息以及所述目标摄像头的镜头参数信息,获取所述目标地理位置信息对应的像素坐标值,包括:
11、基于所述目标数字高程模型数据和所述目标地理位置信息,获取所述目标地理位置信息对应的大地坐标值;
12、通过高斯正算对所述目标地理位置信息对应的大地坐标值进行坐标系转换,获取所述目标地理位置信息对应的物方坐标值;
13、基于所述目标摄像头当前时刻的位置信息、所述目标摄像头的镜头当前时刻的姿态信息、所述目标摄像头的镜头参数信息和所述目标地理位置信息对应的物方坐标值,通过共线方程,获取所述目标地理位置信息对应的像方坐标值;
14、基于所述目标摄像头的镜头参数信息,对所述目标地理位置信息对应的像方坐标值进行坐标系转换,获取所述目标地理位置信息对应的像素坐标值。
15、根据本发明提供的一种区域监控方法,所述基于所述目标摄像头当前时刻的位置信息,在所述目标区域中监控目标所在区域的地理位置信息和数字高程模型数据中,确定所述目标区域当前时刻的影像对应的目标地理位置信息和目标数字高程模型数据,包括:
16、基于所述目标摄像头当前时刻的位置信息,在所述目标区域中所述目标摄像头的垂直投影点;
17、将以所述垂直投影点为圆心,以预设距离为半径的圆形区域,确定为所述目标摄像头的关联区域;
18、在所述目标区域中监控目标所在区域的地理位置信息和数字高程模型数据中,筛选所述目标摄像头的关联区域的地理位置信息和数字高程模型数据,作为所述目标地理位置信息和所述目标数字高程模型数据。
19、根据本发明提供的一种区域监控方法,所述基于所述目标地理位置信息对应的像素坐标值,在所述目标区域当前时刻的影像中标记所述监控目标所在区域,包括:
20、基于所述目标地理位置信息对应的像素坐标值,在空白影像中生成图斑,获得当前时刻目标摄像头对应的图斑影像;
21、在所述当前时刻目标摄像头对应的图斑影像中裁剪出所述目标区域当前时刻的影像对应的目标图斑影像;
22、将所述目标图斑影像与所述目标区域当前时刻的影像进行逐帧叠加,获得标记有所述监控目标所在区域的所述目标区域当前时刻的影像。
23、根据本发明提供的一种区域监控方法,所述获取目标区域当前时刻的影像、目标摄像头当前时刻的位置信息以及目标摄像头的镜头当前时刻的姿态信息之前,所述方法还包括:
24、控制所述目标摄像头的镜头按照预设规则在水平方向和/或竖直方向转动。
25、本发明还提供一种区域监控装置,包括:
26、数据获取模块,用于获取目标区域当前时刻的影像、目标摄像头当前时刻的位置信息以及目标摄像头的镜头当前时刻的姿态信息,所述目标区域当前时刻的影像是由所述目标摄像头拍摄得到的;
27、区域确定模块,用于基于所述目标区域中监控目标所在区域的地理位置信息和数字高程模型数据、所述目标摄像头当前时刻的位置信息、所述目标摄像头的镜头当前时刻的姿态信息以及所述目标摄像头的镜头参数信息,在所述目标区域当前时刻的影像中标记所述监控目标所在区域;
28、区域监控模块,用于对所述目标区域当前时刻的影像中所述监控目标所在区域进行可疑目标识别,在确定所述目标区域当前时刻的影像中所述监控目标所在区域内存在可疑对象的情况下,发出告警信号。
29、本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述区域监控方法。
30、本发明还提供一种电子围栏系统,包括:如上所述的电子设备以及目标摄像头;
31、所述目标摄像头用于获取目标区域的影像数据,并将所述影像数据发送至所述电子设备。
32、根据本发明提供的一种电子围栏系统,还包括:支架;所述支架设置于所述目标区域内的预设位置;所述支架用于固定所述目标摄像头。
33、根据本发明提供的一种电子围栏系统,还包括:无人机;所述无人机用于固定所述目标摄像头;
34、所述电子设备还用于控制所述无人机按照预设路线在所述目标区域内飞行;
35、所述无人机用于响应于所述电子设备的控制,带动所述目标摄像头按照所述预设路线在所述目标区域内飞行。
36、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述区域监控方法。
37、本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述区域监控方法。
38、本发明提供的区域监控方法、装置、电子设备及电子围栏系统,通过基于目标区域中监控目标所在区域的地理位置信息和数字高程模型数据、目标摄像头当前时刻的位置信息、目标摄像头的镜头当前时刻的姿态信息以及目标摄像头的镜头参数信息,在目标区域当前时刻的影像中标记监控目标所在区域,进而在确定目标区域当前时刻的影像中监控目标所在区域内存在可疑对象的情况下,发出告警信号,能更灵活、更低成本地对大面积区域中监控目标所在区域进行监控保护,能提高监控目标所在区域的管理能力,能更好地避免监控目标所在区域的破坏。
- 还没有人留言评论。精彩留言会获得点赞!