基于接触干涉算法的水电站叠梁门入槽干涉判断方法与流程
本发明涉及起重机作业安全管理,具体涉及一种基于接触干涉算法的水电站叠梁门入槽干涉判断方法。
背景技术:
1、为解决江河湖泊流域生态安全问题,需要开展在流域的流量、水温、防洪等多因素条件下的水电站生态调度工作,通过启闭叠梁门,调整取水高度,实现生态调度分层取水。在起重机大车、小车运行过程中,叠梁门会因惯性进行摆动,使叠梁门无法精确入槽产生干涉,增加人力与时间成本。
2、中国专利“一种用于平面叠梁闸门门叶节间临时连接的结构”(授权公告cn208251028u),它包括叠梁门门叶,所述叠梁门门叶之间通过连接装置逐节锁定相连;所述连接装置包括下节门叶边梁和上节门叶边梁,所述下节门叶边梁上加工有手孔,所述下节门叶边梁和上节门叶边梁都采用工字钢材料,在上节门叶边梁的两侧通过第一销轴固定安装有外侧节间连接板和内侧节间连接板;所述外侧节间连接板和内侧节间连接板的底部通过第二销轴与下节门叶边梁相连。通过改变闸门拼装入槽方式,可采用较小吨位的起吊设备将闸门逐节入槽,在门槽内进行节间连接,使闸门实现临时下闸挡水,待坝顶门机或启闭机等吊装设备安装完成后,利用吊装设备将闸门整体起吊至孔口锁锭,再按设计恢复闸门节间连接。
3、通过采用上述的连接结构,能够用于叠梁闸门门叶的节间连接,提高了其效率,解决了现有施工条件下叠梁门安装不便的问题。但是该结构依然不能克服叠梁门因惯性摆动,叠梁门依然无法精确入槽产生干涉。
技术实现思路
1、为现有技术的不足,本发明提供一种基于接触干涉算法的水电站叠梁门入槽干涉判断方法,通过将数学模型与物理模型结合,接收安装在门式起重机上的陀螺仪数据,反映门式起重机的运行状况,使叠梁门准确入槽。
2、本发明采取的技术方案为:
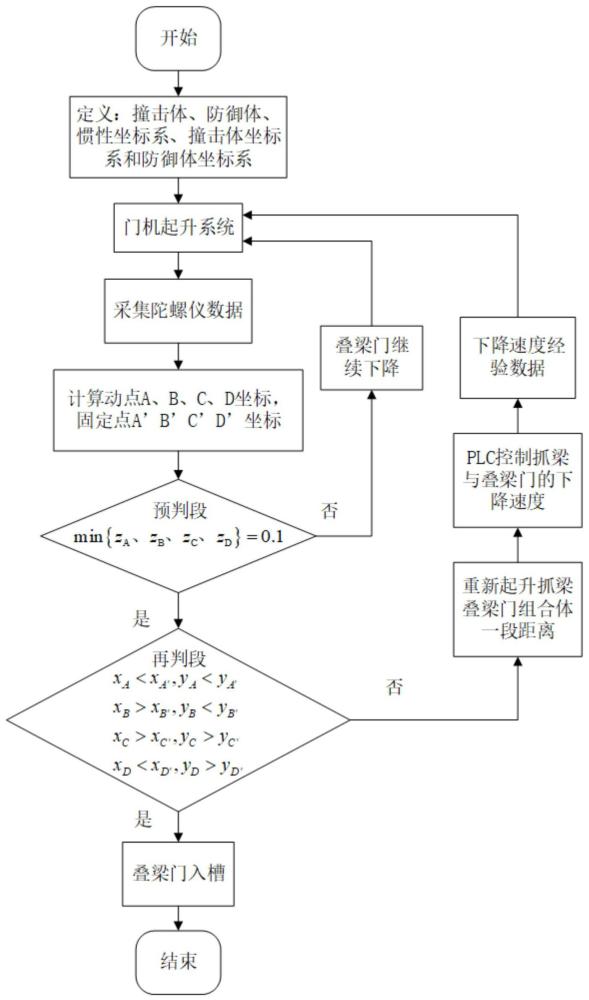
3、基于接触干涉算法的水电站叠梁门入槽干涉判断方法,包括以下步骤:
4、步骤1:基于现场操作门机建立数学模型,定义叠梁门为撞击体,门槽为防御体;
5、步骤2:建立惯性参考系o(x,y,z)、撞击体参考系o1(x1,y1,z1)和防御体参考系o2(x2,y2,z2);
6、步骤3:根据步骤2建立的三个坐标系的位置关系,判断叠梁门入槽状况。
7、所述步骤2中,惯性参考系o(x,y,z)位于水工结构表面,大车轨道末端;
8、撞击体参考系o1(x1,y1,z1)位于抓梁上表面几何中心;
9、防御体参考系o2(x2,y2,z2)位于门槽表面几何中心;
10、参考系x方向为大车运动方向,y方向为小车运动方向,z方向垂直向上。
11、所述步骤3中,根据抓梁、叠梁门的几何形状,几何形状指抓梁、叠梁门的几何长度,通过几何形状的长度确定叠梁门上a、b、c、d的坐标,得到叠梁门上a、b、c、d四个干涉点在撞击体参考系o1(x1,y1,z1)下的齐次坐标分别为
12、所述步骤3中,通过步骤1建立的数学模型得到防御体参考系o2(x2,y2,z2)相对惯性参考系o(x,y,z)之间的位置关系,所述数学模型指操作门机坐标系以及相关撞击体、防御体的定义,如图2所示,得到门槽表面几何中心o2在惯性参考系o(x,y,z)下的直角坐标,进而得到门槽上固定点a'、b'、c'、d'在惯性参考系o(x,y,z)下的直角坐标。
13、通过安装在抓梁上o1点的陀螺仪,得到抓梁、叠梁门与x轴、y轴、z轴的摆角α、β、γ。
14、所述步骤3包括以下步骤:
15、s3.1:根据大车运动距离x大、小车运动距离y小、起升机构下放抓梁与叠梁门距离z起、门机高度h和陀螺仪所测摆角,建立齐次变换矩阵
16、
17、式中:cα=cosα;sα=sinα,cβ,sβ和cγ,sγ依此类推
18、s3.2:通过齐次变换矩阵能够得到叠梁门上a、b、c、d四个干涉点在惯性参考系o(x,y,z)下的齐次坐标;
19、齐次变换矩阵与叠梁门上a、b、c、d四点在撞击体参考系o1(x1,y1,z1)下的齐次坐标相乘得a、b、c、d四点在惯性参考系o(x,y,z)下的齐次坐标(4×1的列矢量),取前三项得直角坐标(3×1的列矢量);
20、
21、
22、
23、
24、进而得到a、b、c、d四点在惯性参考系o(x,y,z)下的直角坐标:
25、xa=x大-h•sβ+sβ•z起+a•cβ•cγ-b•cβ•sγ
26、ya=y小+z起·sα+a•(cα·sγ+cγ•sα·sβ)+b•(cα•cγ-sα•sβ•sγ)+h·cβ·sα
27、za=h-z起·cβ+a·(sα·sγ-cα·cγ·sβ)+b·(cγ·sα+cα·sβ·sγ)-cα·cβ·h
28、xb=x大-h·sβ+sβ·z起-a·cβ·cγ-b·cβ·sγ
29、yb=y小+z起·sα-a·(cα·sγ+cγ·sα·sβ)+b·(cα·cγ-sα·sβ·sγ)+h·cβ·sα
30、zb=h-z起·cβ-a·(sα·sγ-cα·cγ·sβ)+b·(cγ·sα+cα·sβ·sγ)-cα·cβ·h
31、xc=x大-h·sβ+sβ·z起-a·cβ·cγ+b·cβ·sγ
32、yc=y小+z起·sα-a·(cα·sγ+cγ·sα·sβ)-b·(cα·cγ-sα·sβ·sγ)+h·cβ·sα
33、zc=h-z起·cβ-a·(sα·sγ-cα·cγ·sβ)-b·(cγ·sα+cα·sβ·sγ)-cα·cβ·h
34、xd=x大-h·sβ+sβ·z起+a·cβ·cγ+b·cβ·sγ
35、yd=y小+z起·sα+a·(cα·sγ+cγ·sα·sβ)-b·(cα·cγ-sα·sβ·sγ)+h·cβ·sα
36、zd=h-z起·cβ+a·(sα·sγ-cα·cγ·sβ)-b·(cγ·sα+cα·sβ·sγ)-cα·cβ·h
37、s3.3:预判断叠梁门上a、b、c、d四点是否接近门槽平面,发现即将干涉点,留0.1m调整空间,预判段条件为:
38、min{za、zb、zc、zd}=0.1;
39、za、zb、zc、zd分别表示a、b、c、d在惯性参考系下z方向坐标;
40、s3.4:根据门槽几何条件再判断a、b、c、d四点在门槽平面的投影是否在门槽内,是即可入槽;反之则干涉;
41、门槽几何条件指门槽上a’、b’、c’、d’与叠梁门上a、b、c、d的坐标关系,在入槽时门槽与叠梁门的形状边缘不能产生干涉,即坐标之间的大小关系;
42、再判断条件为:
43、xa<xa',ya<ya'
44、xb>xb',yb<yb'
45、xc>xc',yc>yc'
46、xd<xd',yd>yd'。
47、xa、xb、xc、xd指a、b、c、d在惯性参考系下x方向坐标;
48、xa'、xb'、xc'、xd'指a’、b’、c’、d’在惯性参考系下x方向坐标;
49、ya、yb、yc、yd指a、b、c、d在惯性参考系下y方向坐标;
50、ya'、yb'、yc'、yd'指a’、b’、c’、d’在惯性参考系下y方向坐标。
51、起重机电机由plc控制,发生干涉时系统收到反馈,起升系统重新起升抓梁叠梁门组合体一段距离,根据经验数据,插值调整下放速度。
52、本发明一种基于接触干涉算法的水电站叠梁门入槽干涉判断方法,技术效果如下:
53、1)本发明通过数学模型得到门槽上固定点与惯性坐标系之间的位置关系,并将门式起重机上的陀螺仪数据反馈到数学模型中得到叠梁门上动点与惯性坐标系之间的位置关系。可得到门槽上固定点与叠梁门上动点在惯性参考系下的坐标,通过比较坐标大小能更准确判断叠梁门能否入槽。
54、2)本发明通过叠梁门上动点与门槽上固定点的位置,判断叠梁门入槽是否干涉。将叠梁门入槽是否干涉转换成门槽上固定点与叠梁门上动点坐标之间的比较,更加准确判断叠梁门入槽是否干涉。
55、3)该方法可反映起重机的运行状况,提高叠梁门入槽准确度,节约人力与时间成本。
56、4)通过plc将干涉信息及时反馈给系统,保障作业安全。该方法将接触干涉数据与现场操作门机结合,用于监测门机运行状态,反馈门机的运动数据,很好的满足当前无人化升级的要求。
- 还没有人留言评论。精彩留言会获得点赞!