一种在不确定工业环境中优化拆卸顺序规划的高效元启发式算法的制作方法
本发明涉及工业设备维护,具体为一种在不确定工业环境中优化拆卸顺序规划的高效元启发式算法。
背景技术:
1、工业设备维护对生产连续性和设备寿命至关重要。拆卸顺序规划(dsp)是一个关键环节,重点是确定拆卸部件的最佳顺序。
2、现有技术中在dsp挑战研究方面已经取得了重大进展。然而,针对与设备维护相关的折卸难题的研究相对较少。在解决不确定的dsp问题时,模糊逻辑因其在解决dsp挑战方面的便利性和潜力而成为一种有效的探索途径。不过,模糊逻辑在探索能力方面具有一定的局限性。元启发式算法一直是解决dsp难题的有力工具
3、高效的设备维护在很大程度上依赖于合理的dsp,因为只有在这一过程结束后才能开始实质性的维护工作。然而,工业设备维护充满了不确定性,如复杂的设备结构、多样的维护组件和不同的维护条件。这些不确定性使dsp问题变得更加复杂,使传统方法的效果大打折扣。因此,迫切需要一种新的方法来解决这些不确定性,并提高维护效率和质量,本发明提供一种在不确定工业环境中优化拆卸顺序规划的高效元启发式算法。
技术实现思路
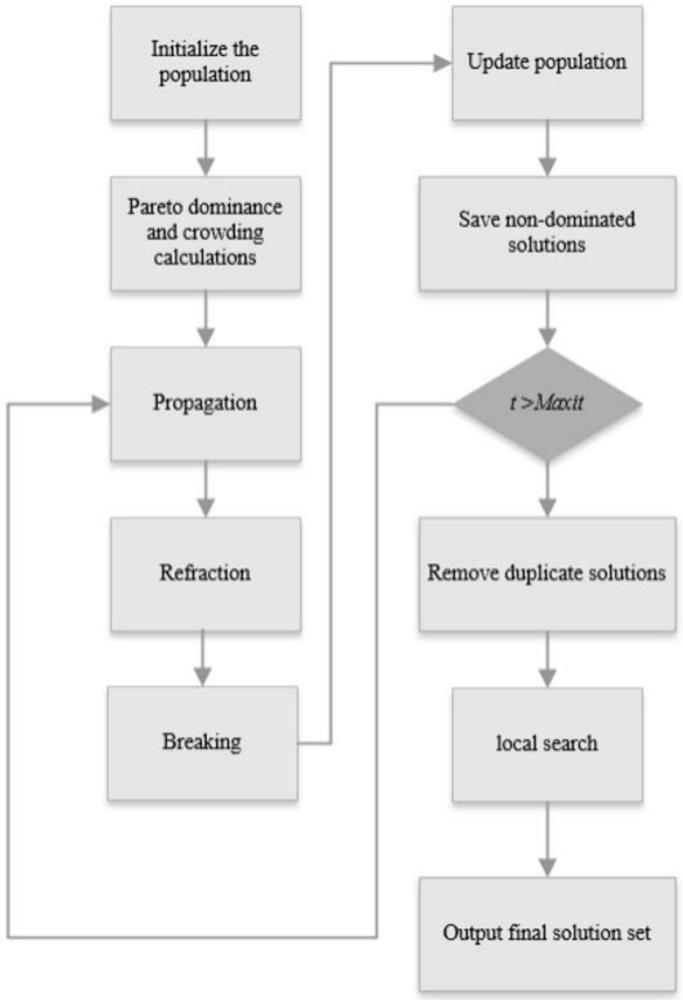
1、针对现有技术存在的不足,本发明目的是提供一种在不确定工业环境中优化拆卸顺序规划的高效元启发式算法,以解决上述背景技术中提出的问题,本发明引入了新颖的ewwo算法,该算法通过重新定义传播、反射和分解算子,并结合创新的局部搜索策略,有效地解决了dsp问题。
2、为了实现上述目的,本发明是通过如下的技术方案来实现:一种在不确定工业环境中优化拆卸顺序规划的高效元启发式算法,包括以下步骤:
3、步骤1、构建多目标dsp的数学模型,该过程中包括以下主要流程:
4、步骤1.1、选择建模方法,所述建模方法选择分解混合图;
5、步骤1.2、采用三角模糊数来表示拆卸的不确定性;
6、三角模糊数通常由三个关键值组成:最小值、最大值和峰值,这些值共同定义了随机变量的潜在范围,其中峰值代表最可能的值,而最小值和最大值则确定了可能值范围的边界,三角形模糊数的形状类似三角形,峰值位于三角形的顶点,通过公式(1)中的成员函数进一步解释该表示方法。
7、
8、下面是三角形模糊数的一般表示方法:
9、a=(a,b,c) (2)
10、其中,a代表三角形模糊数的最小值:代表三角形模糊数的最大值:c代表三角形模糊数的峰值,即最有可能的值,三角模糊数具有确定的运算规则和成员函数,模型中利用这些规则和函数进行计算;接下来提供包括运算规则和评分函数的定义并利用这些定义在模型中进行计算:
11、假设两个三角形模糊数a=(a1,b1,c1)b=(a2,b2,c2)它们的运算规则定义如公式(3)至(7)所示。
12、
13、
14、
15、λa=(λa1,λb1,λc1) (6)
16、aq=(a1q,b1q,c1q) (7)
17、将三角形模糊数转换成评分函数,通过比较得分函数的大小来确定两个三角形模糊数之间的排序:
18、
19、步骤1.3、建立了所提问题的数学模型,所述数学模型中使用的符号包括指数、参数、决策变量,且数学模型中使用下列gon公式:
20、
21、
22、
23、f3=tn+dn (12)
24、
25、
26、f3=tn+dn (15)
27、步骤2、定制一种元启发式算法来获得可行的解决方案,该过程选择wwo算法作为主要的解决方法,然后根据当前问题的独特性对其进行定制,主要包括以下内容:
28、步骤2.1、利用帕累托优势和拥挤距离计算来平衡三个目标,这是多目标优化问题中常用的概念,用于比较和选择解决方案;
29、步骤2.2、wwo算法主要以连续方式运行,为了使其符合问题的离散性,应将其搜索空间离散化,并将拆卸序列表示为字符串;
30、步骤2.3、使用传播算子并将其应用于传统的wwo更新规则中;
31、步骤2.4、如果一个解决方案在多次搜索后仍没有改进,即解决方案对应的h值为0,就对其执行折射操作,找出当前帕累托前沿第一层中拥挤距离最小的解,并将其部分解折射到需要更新的解中,对于当前解中未被折射的其余位置将其顺序颠倒过来;
32、步骤2.5、如果一个个体在经过传播操作后,产生了一个比当前最佳个体更好的个体,就对这个新个体进行破波操作,从中随机选取两个点,然后将它们互换,这个过程一直持续到预设的最大次数、kmax.如果新方案的得分小于旧方案的得分,即s(xnew)<s(xold)则更新解;否则,如果min(βs(xnew)/s(xold),1)<u则也会更新解;
33、步骤2.6、为了进一步提高ewwo所获非主导解集的质量,引入了一种局部搜索策略,所述局部搜索策略中,在当前解决方案中随机选择n个点(其中1<n<m/2),并在拆解序列中重新定位这n个点,并对每种方案执行搜索kmax次。
34、进一步的,典型的拆卸混合图包括两类关系:优先约束和直接接触关系。
35、进一步的,所指数符号包括m:表示拆卸组件的索引,m=1,2,..,m;
36、参数符号包括以下部分
37、m:拆卸部件总数
38、tm:与部件m相关的模糊拆卸时间
39、sm:拆除部件m的复杂程度
40、tt:更换工具所需的模糊时间
41、td:改变方向所需的模糊时间
42、im:部件m在拆卸序列中的位置
43、dn:拆卸顺序中方向变化的次数
44、tn:拆卸顺序中的工具更换次数;
45、决策变量包括以下部分:hm:部件m的优先级指标。
46、进一步的,如果部件m具有优先级,则hm=1;否则,hm=0。
47、进一步的,所述步骤1.3中,模型包括三个不同的目标函数,公式(9)是主要的优化方向;公式(10)专门用于量化总拆卸时间;公式(11)专门针对提高优先组件的响应速度,最终有助于提高维护效率;公式(12)通过考虑工具更换次数和方向改变等因素,对操作流程进行了优化。
48、进一步的,公式(13)和(14)概括了拆卸部件的前提条件,所述前提条件要求不受优先级更高的部件的干扰,并限制与目标部件接触的部件数量,所述前提条件在确保顺利拆卸过程中发挥了重要作用;公式(15)在模型中引入了二进制变量,为决策过程和约束条件提供了进一步的定义。
49、进一步的,所述步骤2.2中,将拆卸混合图转换成两个矩阵,分别命名为p和c。随后,在矩阵p中进行搜索,找出完全由零组成的行,以及矩阵c中小于或等于1的成对元素,在这些行中随机选择一行作为拆卸序列中一个元件的起点,在选择之后,被选中的行将被移除,然后重复上述步骤,直到所有组件都被分配到拆卸序列中的位置。
50、进一步的,通过步骤2.2初始化群体,使ewwo算法在解空间内开始搜索,最终找到最佳拆卸顺序。
51、进一步的,所述步骤2.1中,帕累托优势的条件包括以下部分:在至少一个目标上,解决方案a至少与解决方案b一样好;解决方案a至少在一个目标上严格优于解决方案b;如果满足上述两个条件,那么方案a就会在方案b中占据帕累托优势。
52、进一步的,所述步骤2.2中,搜索空间离散化通过采用整数编码来实现,并有效地将拆卸序列表示为字符串这一过程从生成初始种群开始,而初始种群与拆解混合图密切相关。
53、本发明的有益效果:
54、1.本发明采用多目标增强型水波优化(ewwo)算法。该算法中重新设计了传播、折射和破浪算子。此外还引入了创新的局部搜索策略。该算法在解决拆卸维护问题方面具有较大的潜力,还突出了其在生成高质量、高效解决方案方面的卓越性能,为不确定环境下的工业设备维护带来了大量潜在优势,最终将切实提高拆卸维护的效率和质量。
55、2.本发明引入了与设备维护相关的模糊多目标dsp拆卸模型,能够有效的减少拆卸时间,降低工具和方向更换频率,并提高关键维护组件的响应时间。利用三角模糊数来表示源于组件使用的不确定性,借助高效的元启发式算法解决该问题。
56、3.该在不确定工业环境中优化拆卸顺序规划的高效元启发式算法中,通过三角模糊数这种方法根据不确定性条件做出自适应决策,在节约计算资源的同时全面优化维护工作台。
- 还没有人留言评论。精彩留言会获得点赞!