一种特高含水油水两相流油泡识别方法
:本发明属于石油工程,具体涉及一种特高含水油水两相流油泡识别方法。
背景技术
0、
背景技术:
1、目前我国油田已经进入可特高含水期,油水两相流的流动特性发生了很大的变化。油水两相流的特性与油泡的大小、形状和分布密切相关。piv/ptv是一种有效的油水两相流流动特性研究方法,而采用piv/ptv研究流动特性的关键是油泡的准确识别。
2、目前各国学者提出了各种各样的油泡识别方法,解决了一部分问题,但现有油泡识别方法主要存在以下两个问题:
3、(1)油泡识别速度慢,现有方法需要进行全图油泡的匹配是造成速度慢的主要因素,现有对油泡的位置研究集中在通过仪器测量和相关理论来计算出油泡的当前位置,很少对油泡的位置进行预测,油泡匹配区域为全图像,致使油泡匹配速度慢,导致油泡识别速度慢。
4、(2)现有油泡的识别方法多将油泡看成固定不变的,但是由于液滴碰撞等原因,相邻图像中的油泡也已经有微小形变,现有方法难以识别已经发生微小形变的油泡,故准确率不高。
技术实现思路
0、
技术实现要素:
1、本发明的目的是为克服现有特高含水油水两相流油泡方法中油泡匹配区域为全图像造成的识别速度慢和油泡变形导致的识别率低的缺陷,提供一种特高含水油水两相流油泡识别方法。
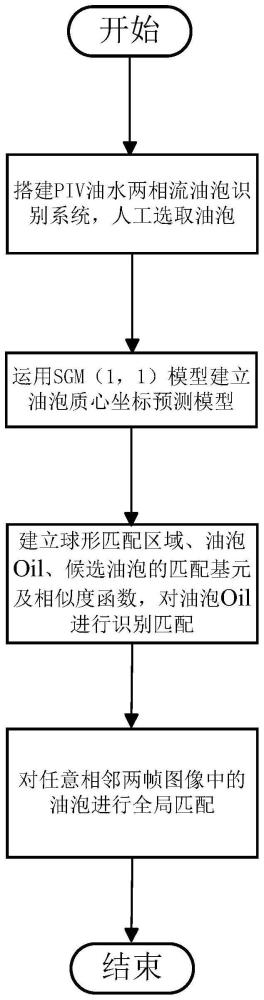
2、本发明采用的技术方案为:一种特高含水油水两相流油泡识别方法,所述特高含水油水两相流油泡识别方法包括以下步骤:
3、步骤一:搭建piv油水两相流油泡识别系统,选取初始油泡;
4、步骤二:运用灰色系统理论sgm(1,1)模型,对油泡oil质心坐标的位置进行预测;
5、步骤三:对油泡oil进行识别匹配;
6、步骤四:对任意相邻两帧图像中的油泡进行全局匹配。
7、进一步地,所述步骤一中搭建piv油水两相流油泡识别系统和选取初始油泡的方法如下:
8、piv油水两相流油泡识别系统包含两台参数一致的高速摄像机、两个相同规格可调节高速摄像机高度的摄像机支架、透明的玻璃管道和一台控制计算机。两台摄像机分别命名为1号高速摄像机和2号高速摄像机,1号和2号高速摄像机由计算机连接,使其保持拍摄同步性。调整1号和2号高速摄像机与透明玻璃管道至同一高度,待透明玻璃管道中的油水两相流稳定后,对油水两相流进行同步拍摄。
9、同步的任取2台高速摄像机相邻五帧的图片,记第chushinumber1帧、chushinumber1+1帧、chushinumber1+2帧、chushinumber1+3帧、chushinumber1+4帧为1号高速摄像机任取5帧相邻图像,chushinumber1是1号高速摄像机拍摄的第一帧图像的序号;记为chushinumber2+1帧、chushinumber2+2帧、chushinumber2+3帧、chushinumber2+4帧,chushinumber2为2号高速摄像机任取5帧相邻图像,chushinumber2是2号高速摄像机拍摄的第一帧图像的序号;chushinumber表示油泡所在的图像的帧数,分别从第chushinumber1帧、chushinumber1+1帧、chushinumber1+2帧、chushinumber1+3帧、chushinumber1+4帧这五帧图片中,选取每帧图片中油泡面积最大的油泡作为初始油泡,同步的从第chushinumber2帧、chushinumber2+1帧、chushinumber2+2帧、chushinumber2+3帧、chushinumber2+4帧中同样人工选取到油泡oil。通过1号、2号高速摄像机拍到油泡oil的图片,利用双目视觉原理来获取油泡oil的三维质心坐标,方法如下:
10、1号高速摄像机的空间坐标系为o-xyz,与世界坐标系重合(原点o是1号高速摄像机的光心,且空间坐标系o-xyz无旋转),有效焦距为fl,1号高速摄像机光心o与其图像平面的交点为ol,以ol为原点,建立1号高速摄像机的图像坐标系为ol-xlyl;2号高速摄像机的空间坐标系为or-xryrzr,or是2号高速摄像机的光心,2号高速摄像机光心or与其图像坐标系交点为orr,以orr为原点建立2号高速摄像机的图像坐标系为orr-xryr;通过油泡oil在1号高速摄像机图像坐标系ol-xlyl和在2号高速摄像机图像坐标系orr-xryr呈现的图像,计算出油泡oil在两个图像坐标系中质心的坐标,结合标定参数r、t,第chushinumber+i帧图像中油泡oil的三维质心坐标zhixinpi(xp(0)(i),yp(0)(i),zp(0)(i)),表示方法如下:
11、
12、式中,xp(0)(i)、yp(0)(i)、zp(0)(i)分别为选取油泡oil在第chushinumber+i帧图像中的质心坐标的x向、y向、z向分量,i为任选5帧图像的帧序号,i从chushinumber帧到chushinumber+4帧,chushinumber帧是第一帧图像,每帧中包含ol-xlyl图像坐标系和orr-xryr图像坐标系下两幅人工选取的油泡oil的图片;fl是1号高速摄像机的有效焦距,fr是2号高速摄像机的有效焦距;x'l(i)、y'l(i)分别代表第chushinumber+i帧图像中1号高速摄像机图像坐标系ol-xlyl下,油泡oil的x向、y向的质心坐标;x'r(i)、y'r(i)分别代表第chushinumber+i帧图像中2号高速摄像机图像坐标系orr-xryr下,油泡oil的x向、y向的质心坐标。
13、x'l(i)、y'l(i)、x'r(i)、y'r(i)表达式如下:
14、
15、式中,sl代表油泡oil在1号高速摄像机图像平面上的投影面积,为油泡oil区域所覆盖的像素点数之和;sr代表油泡oil在2号高速摄像机图像平面上的投影面积,为油泡oil区域所覆盖的像素点数之和;mlx、mly分别代表1号高速摄像机图像坐标系ol-xlyl下油泡oil区域内像素点x坐标、y坐标的总和;mrx、mry分别代表2号高速摄像机图像坐标系or-xryr下油泡oil区域内像素点x坐标、y坐标的总和。
16、1号高速摄像机向2号摄像机空间坐标系的空间转换关系如下:
17、
18、式中,r为1号高速摄像机和2号摄像机空间坐标系间的旋转矩阵;t为1号高速摄像机和2号摄像机空间坐标系原点之间的平移矩阵。
19、式中,θ表示1号摄像机的空间坐标系和2号空间坐标系y轴方向旋转角度;tx表示当1、2号高速摄像机的空间坐标系的重合时,2号高速摄像机的空间坐标系or-xryrzr的原点or向世界坐标系o-xyz的原点o平移时x方向的平移量;tz表示当1、2号高速摄像机的空间坐标系的重合时,2号高速摄像机的空间坐标系or-xryrzr的原点or向世界坐标系o-xyz的原点o平移时z方向的平移量。
20、进一步地,所述步骤二中,运用sgm(1,1)模型,对油泡oil质心坐标进行预测,第chushinumber+i帧图像中油泡oil的三维质心坐标预测值表示如下:
21、
22、式中,分别表示第chushinumber+i帧油泡oil质心坐标的预测值的x向、y向、z向分量;xp(0)(1)、yp(0)(1)、zp(0)(1)表示第chushinumber帧,油泡oil的三维质心坐标;a、b分别表示为发展系数、灰色作用量,a、b表示方法如下:
23、
24、式中,a(0)(i)表示的是第chushinumber+i帧中油泡oil三维质心坐标,i为任选5帧图像的帧序号,i从chushinumber帧到chushinumber+4帧,chushinumber帧是第一帧图像,每帧中包含两幅人工选取的油泡oil图片,这两幅油泡oil图片分别由1号、2号高速摄像机拍摄得到。
25、a(0)(i)表达式如下:
26、a(0)(i)=(xp(0)(i),yp(0)(i),zp(0)(i)),i=1,2,3,4,5
27、q(1)(i)是a(0)(i)一次累加序列a(1)(i)的紧邻生成序列;
28、q(1)(i)表示方法如下:
29、q(1)(i)=(1-α)a(1)(i)+αa(1)(i-1),i=2,3,4,5
30、式中,α是背景构造参数,α∈(0,1),a(1)(i)是质心坐标a(0)(i)的一次累加值,a(1)(i)表示方法如下:
31、
32、进一步地,所述步骤三中对目标油泡oil进行识别匹配的方法如下:
33、以chushinumber+4帧中人工选取的油泡oil为目标油泡,在第chushinumber+5帧中,在球形匹配区域中识别匹配出目标油泡oil。识别方法中包括了球形匹配区域的选取和油泡的匹配两个部分。
34、球形匹配区域的选取方法如下:
35、以chushinumber+5帧中油泡oil的质心预测坐标为圆心,半径为roil建立球形匹配区域,球形匹配区域必须包含完整的油泡,若球形区域包含了油泡的一部分,则扩大球形区域,直到包含完整的油泡。球形匹配区域内的油泡是油泡oil的候选油泡,β表示候选油泡中第β个油泡,nnumber为候选油泡中包含的油泡总数量。球形匹配区域表达式如下:
36、
37、式中,ux(β)、uy(β)、uz(β)分别代表候选油泡中第β个候选匹配油泡质心的三维坐标。
38、油泡的匹配方法如下:
39、油泡的匹配是根据油泡的特征来进行的,表示第β个候选油泡特征的匹配基元有面积形变度δs(β)、最高高度变化度δh(β)、周长变化度δc(β)、在1号摄像机ol-xlyl平面投影面积sl(β)、在2号摄像机orr-xrryrr平面投影面积sr(β)。建立如下油泡相似度函数f(λs,λh,λc,λlrs,δs(β),δh(β),δc(β),flrs(β),fsoboil):
40、
41、式中,λs为油泡面积形变度系数,λh为油泡最高高度变化度系数,λc为油泡周长变化度系数,λlrs为油泡投影面积系数;
42、λs、λh、λc、λlrs可通过人工选择多幅图片,人工匹配油泡,从而通过标定的方法获得。
43、第β个候选油泡面积形变度δs(β)可表示如下:
44、δs(β)=|sl(β)-sr(β)|
45、第β个候选油泡最高高度变化度δh(β)可表示如下:
46、δh(β)=|hl(β)-hr(β)|
47、式中,hl(β)表示第β个候选油泡在1号摄像机ol-xlyl平面投影最高高度,hr(β)表示第β个候选油泡在2号摄像机orr-xrryrr平面投影最高高度。
48、第β个候选油泡周长变化度δc(β)可表示如下:
49、δc(β)=|cl(β)-cr(β)|
50、式中,cl(β)表示第β个候选油泡在1号摄像机ol-xlyl平面投影周长,cr(β)表示第β个候选油泡在2号摄像机orr-xrryrr平面投影周长。
51、第β个候选油泡投影面积flrs(β)可表示如下:
52、flrs(β)=sl(β)+sr(β)
53、式中,sl(β)表示第β个候选油泡在1号摄像机ol-xlyl平面的投影面积,sr(β)表示第β个候选油泡在2号摄像机在orr-xrryrr平面投影面积。
54、表示目标油泡oil特征的匹配基元包括:目标油泡oil的面积形变度oboils,目标油泡oil的最高高度变化度oboilh,目标油泡oil的周长变化度oboilc,目标油泡oil的投影面积fsoboil。
55、目标油泡oil的面积形变度oboils可表示如下:
56、oboils=|soboill-soboilr|
57、式中,soboill表示目标油泡oil在1号摄像机在ol-xlyl平面投影的面积,soboilr表示目标油泡oil在2号摄像机在orr-xrryrr平面投影的面积。
58、目标油泡oil的最高高度变化度oboilh可表示如下:
59、oboilh=|loboilh-roboilh|
60、式中,loboilh表示目标油泡oil在1号摄像机ol-xlyl平面投影最高高度,roboilh表示目标油泡oil在2号摄像机orr-xrryrr平面投影最高高度。
61、目标油泡oil的周长变化度oboilc可表示如下:
62、oboilc=|loboilc-roboilc|
63、式中,loboilc表示目标油泡oil在1号摄像机ol-xlyl平面投影周长,roboilc表示目标油泡oil在2号摄像机orr-xrryrr平面投影周长。
64、目标油泡oil的投影面积fsoboil可表示如下:
65、fsoboil=soboill+soboilr
66、计算所有候选油泡的相似度函数值,找出候选油泡中相似度函数值最小的油泡,即为目标油泡oil,完成目标油泡oil的识别匹配。
67、进一步地,所述步骤四中,对任意相邻两帧图像chushinumberioptional帧、chushinumberioptional+1帧中的油泡进行全局匹配,ioptional为任选帧图像的帧序号。全局匹配包括建立球形匹配区域和对油泡进行匹配两部分。具体方法如下:
68、对chushinumberioptional、chushinumberioptional+1相邻两帧图像进行灰度化、背景灰度化、差影检测、canny算子边缘检测处理,提取图像中油泡的特征信息。
69、对处理过后的chushinumberioptional帧的图像中的油泡按照从上到下,从左到右的顺序依次进行编号,chushinumberioptional帧中油泡的质心坐标表示为zhixinpoptional(xp(0)(ω),yp(0)(ω),zp(0)(ω)),ω=1,2,3,4,5,......mnumber
70、式中,xp(0)(ω)、yp(0)(ω)、zp(0)(ω)分别表示chushinumberioptional帧中第ω号油泡质心坐标的x向、y向、z向分量,ω是编号,mnumber是chushinumberioptional帧中油泡的总数。
71、任取第ω号油泡作为目标油泡,对其进行匹配,方法如下:
72、第ω号油泡在第chushinumberioptional+1帧中质心坐标的预测值为以为圆心,半径为roptional建立球形匹配区域,球形匹配区域必须包含完整的油泡,若球形区域包含了油泡的一部分,则扩大球形区域,直到包含完整的油泡。球形匹配区域内的油泡是第ω号油泡的候选油泡,ε表示候选油泡中第ε个油泡,enumber表示候选油泡中油泡的总个数。
73、球形匹配区域,其表达式如下:
74、
75、ux(ε)、uy(ε)、uz(ε)分别是候选油泡中第ε个候选油泡质心的三维坐标。
76、油泡进行匹配,方法如下:
77、候选油泡中第ε个候选油泡相似度函数f(λs,λh,λc,λlrs,δs(ε),δh(ε),δc(ε),flrs(ε),fsobω):
78、
79、式中,δs(ε)、δh(ε)、δc(ε)、sl(ε)、sr(ε)、flrs(ε)分别表示第ε个候选油泡的面积形变度、最高高度变化度、周长变化度、在1号摄像机ol-xlyl平面投影面积、在2号摄像机orr-xrryrr平面投影面积;obωs、obωh、obωc、sobωl、sobωr、fsobω分别表示第ω号油泡的面积形变度、最高高度变化度、周长变化度、在1号摄像机ol-xlyl平面投影面积、在2号摄像机orr-xrryrr平面投影面积、投影面积。
80、计算候选油泡油泡的相似度函数值,找出候选油泡中相似度函数值最小的油泡,且满足:
81、min|f(λs,λh,λc,λlrs,δs(ε),δh(ε),δc(ε),flrs(ε),fsobω)|≥tescape
82、式中,tescape是油泡逃逸阈值,是判断chushinumberioptional帧中的油泡在chushinumberioptional+1帧中发生油泡逃逸的参数,tescape可从发生油泡逃逸的相邻帧图片中,人工标定而来。
83、通过上述方法,即可完成任意相邻两帧chushinumberioptional帧、chushinumberioptional+1帧中油泡的全局匹配。
84、本发明的有益效果:
85、(1)采用灰色系统理论sgm(1,1)模型对油泡的质心坐标进行预测,并在油泡质心位置的邻域内对目标油泡进行匹配,克服了油泡全图匹配造成耗时较长,匹配速度慢的缺陷,加快了油泡识别匹配的速度;
86、(2)建立油泡的特征向量,克服了因油泡运动过程中,发生形变导致的识别匹配准确率低的缺陷,使油泡匹配的准确率大大增加。
- 还没有人留言评论。精彩留言会获得点赞!