一种直升机外吊挂系统动稳定性判别方法和装置与流程
本技术属于直升机飞行动力学,尤其涉及一种直升机外吊挂系统动稳定性判别方法和装置。
背景技术:
1、外吊挂运输是直升机重要的任务能力之一,由于不受吊运货物的尺寸限制,外吊挂运输应用广泛。然而许多钝体外形的吊挂货物容易受到气动上的不稳定扰动,尤其是在大速度前飞时易发生偏航振荡或旋转,同时伴随着横向的摆动振荡。
2、从目前多种型号直升机吊挂试飞情况看,均存在前飞吊挂体摆动问题,严重降低直升机吊挂飞行的飞行品质,增加飞行员的操纵负荷,影响直升机的任务效能和飞行安全。
3、外吊挂货物种类多样,若建立直升机与吊挂系统耦合的运动方程分析动稳定性需要大量的气动数据,并且难以为吊挂系统增稳提供直接指导;若以孤立吊挂系统运动方程为基础,通过简化得到动稳定性判别方程,可对不同种类吊挂货物、不同长度吊索配置的吊挂系统稳定性进行快速估计,便于探究增稳方式。
技术实现思路
1、本发明的目的:本技术提供一种直升机外吊挂系统动稳定性判别方法,通过吊挂货物的转动惯量、阻力系数、气动导数、吊索长度和前飞速度等参数解析得到外吊挂系统动稳定性判别式,以快速评估外吊挂飞行动稳定性及参数敏感性,为吊挂系统增稳提供指导。
2、第一方面,本技术提供了一种直升机外吊挂系统动稳定性判别方法,所述判别方法包括:
3、基于直升机外吊挂系统平衡方程组,得到吊挂系统横航向平衡方程组;
4、基于所述吊挂系统横航向平衡方程组,得到吊挂系统小扰动运动方程;
5、基于所述吊挂系统小扰动运动方程,得到吊挂系统的系统矩阵;
6、基于所述系统矩阵,得到系统特征方程,处理所述系统特征方程,得到简化方程;
7、基于所述简化方程,确定吊挂系统横航向稳定的判别条件;
8、基于所述判别条件,确定直升机外吊挂系统的动稳定性。
9、优选地,所述基于直升机外吊挂系统平衡方程组,得到吊挂系统横航向平衡方程组,包括:
10、假设吊运货物的质量关于三个主轴平面对称分布且气动上纵向和横航向分离,得到所述吊挂系统横航向平衡方程组,见公式(1)。
11、
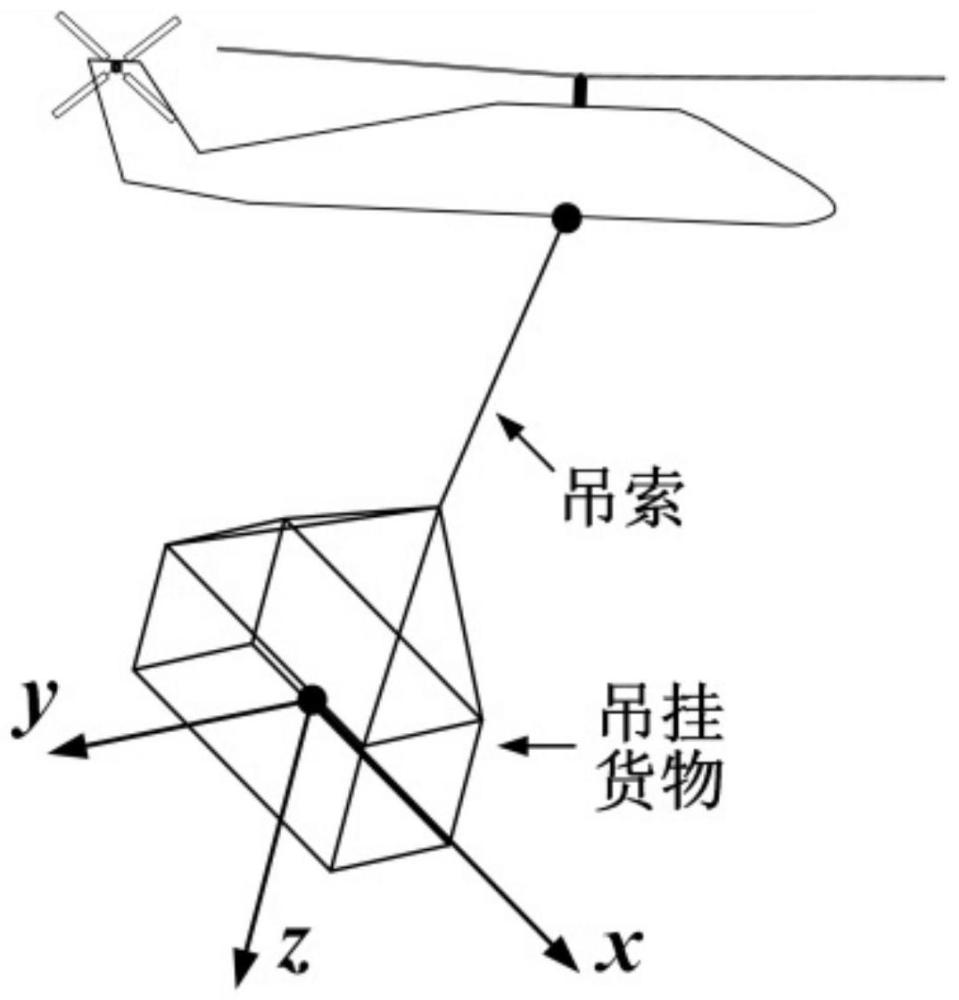
12、其中,y表示吊挂货物的侧向力,l、n分别表示x轴、z轴方向的力矩,ty表示吊索拉力在y轴方向的分量,mtx、mtz分别表示吊索拉力对吊挂体产生的力矩的x轴和z轴方向分量,u、v、w分别表示吊挂货物速度在x轴、y轴、z轴方向的三个分量,为吊挂货物在y轴方向的加速度,p、r分别表示角速度的x轴、z轴方向的分量,表示相应的角加速度,ix、iz分别表示吊挂货物对x轴、z轴的转动惯量,ψ、θ、φ分别表示吊挂货物的偏航角、俯仰角、滚转角,分别表示吊挂货物的偏航角速度、俯仰角速度、滚转角速度,表示吊挂货物在直升机机体坐标系下的侧向速度。
13、优选地,所述基于所述吊挂系统横航向平衡方程组,得到吊挂系统小扰动运动方程,包括:
14、假设不考虑直升机带吊挂侧飞或垂向运动,则v、w等于0;假设吊挂货物平衡状态姿态角变化不大,则ψ、θ、φ近似为0;假设吊索拉力通过吊挂货物质心,则mtx、mtz等于0,再经对状态量的小扰动线化假设,得到线化的吊挂系统运动方程,见公式(2)
15、
16、其中,δ表示小扰动量,yv,nv为气动导数,分别表示侧向力和偏航力矩对侧向速度的偏导数,d表示平衡状态下的阻力,a表示吊挂货物在后摆时相对于x轴的位移。
17、优选地,所述基于所述吊挂系统小扰动运动方程,得到吊挂系统的系统矩阵,包括:
18、在吊挂系统小扰动运动方程中包含吊挂系统的系统矩阵,用a表示,见公式(3)
19、
20、优选地,所述基于所述系统矩阵,得到系统特征方程,包括:
21、吊挂系统的动稳定性可由系统矩阵的特征根表示,系统矩阵a的特征方程见公式(4)
22、
23、其中,λ表示系统矩阵的特征根。
24、优选地,所述处理所述系统特征方程,得到简化方程,包括:
25、吊挂系统的特征方程可降为4阶,展开为一元四次方程,见公式(5)
26、izmλ4-izyvλ3+(nvum+diz/a)λ2+nvdλ+nvdu/a=0 (5)
27、式中,
28、a=lsin(arctan(d/mg))≈ld/mg (6)
29、d=0.5ρu2scd (7)
30、
31、
32、其中,l表示吊索长度,ρ表示大气密度,g表示重力加速度s表示参考面积,b表示参考长度,前飞速度u为参考速度,β表示吊挂体侧滑角,cd为阻力系数,cyβ为侧向力对侧滑角的无量纲气动导数,cnβ为侧向力矩对侧滑角的无量纲气动导数。
33、优选地,所述基于所述简化方程,确定吊挂系统横航向稳定的判别条件,包括:
34、将公式(6)-(9)带入公式(5),公式(5)的解即为吊挂系统动稳定性特征根;公式(5)为四阶系统特征方程,带入四阶系统判别式,得到吊挂系统横航向稳定的充分必要条件为:
35、(1)cyβ小于0,cnβ大于0;
36、(2)式中,iz*=iz/0.5ρsb3,g*=gb/u2,l*=l/b;由此可知,判别吊挂系统是否稳定的主要参数有吊挂货物气动导数cyβ和cnβ,阻力系数cd,转动惯量iz,吊索长度l和前飞速度u。
37、优选地,所述基于所述判别条件,确定直升机外吊挂系统的动稳定性,包括:
38、当吊挂系统同时满足cyβ小于0,cnβ大于0,时,吊挂系统横航向稳定;若吊挂系统不满足cyβ小于0,cnβ大于0或其中之一时,吊挂系统横航向不稳定。
39、第二方面,本技术还提供了一种直升机外吊挂系统动稳定性判别装置,所述判别装置包括:
40、第一确定模块,用于基于直升机外吊挂系统平衡方程组,得到吊挂系统横航向平衡方程组;
41、第一确定模块,用于基于所述吊挂系统横航向平衡方程组,得到吊挂系统小扰动运动方程;
42、第一确定模块,用于基于所述吊挂系统小扰动运动方程,得到吊挂系统的系统矩阵;
43、处理模块,用于基于所述系统矩阵,得到系统特征方程,处理所述系统特征方程,得到简化方程;
44、判别模块,用于基于所述简化方程,确定吊挂系统横航向稳定的判别条件;
45、分析模块,用于基于所述判别条件,确定直升机外吊挂系统的动稳定性。
46、本发明的有益技术效果:
47、本发明中的简化判别方法可快速简便地估算出直升机外吊挂飞行的稳定性,且仅需吊挂货物气动导数cyβ和cnβ,阻力系数cd,转动惯量iz,吊索长度l和前飞速度u六个参数,便于在设计阶段分析参数敏感性,研究吊挂系统增稳方式,对吊挂飞行试验、飞行手册编制过程中起到定量的指导作用。
- 还没有人留言评论。精彩留言会获得点赞!