地图矢量化生成方法、装置和服务器与流程
本技术涉及人工智能领域,尤其涉及一种地图矢量化生成方法、装置和服务器。
背景技术:
1、随着网络的不断发展,用户在出行时使用地图进行导航,已经成为用户寻路的主流方法。
2、现有技术中,高精地图主要依赖人工标注。技术人员通常需要在获取道路图像后,对该道路图像中的要素进行人工标注。
3、然而,高精地图的数据量巨大,人工标注存在地图标注效率慢的问题。
技术实现思路
1、本技术提供一种地图矢量化生成方法、装置和服务器,用以解决地图标注效率慢问题。
2、第一方面,本技术提供一种地图矢量化生成方法,包括:
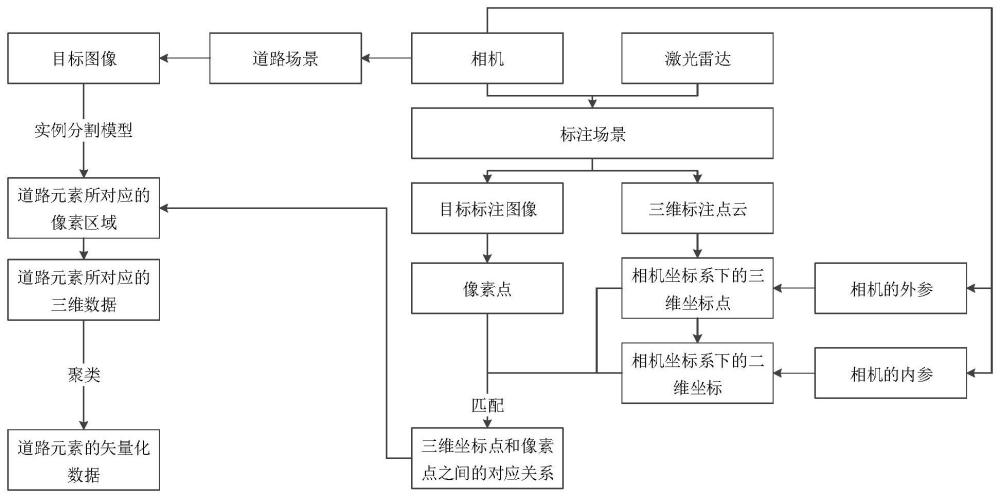
3、获取在同一时刻相机对标注场景进行拍摄时的目标标注图像和激光雷达对所述标注场景进行采集时的三维标注点云;
4、根据所述三维标注点云和所述相机的外参,获得相机坐标系下的三维坐标点;根据所述相机坐标系下的三维坐标点和所述相机的内参获得所述相机坐标系下的二维坐标点;
5、将所述相机坐标系下的二维坐标点和所述目标标注图像中像素点进行匹配,所述相机坐标系下的二维坐标点和所述目标标注图像中像素之间对应关系;
6、根据所述相机坐标系下的二维坐标点和所述目标标注图像中像素点之间对应关系,获得三维空间中各个三维坐标点和图像中像素点之间的对应关系;
7、获取采集车辆采集的道路场景的目标图像,将所述目标图像输入实例分割模型,得到所述道路场景中的道路元素所对应的像素区域;
8、针对每个道路元素所对应的像素区域,使用所述道路元素所对应的像素区域和三维空间中各个三维坐标点和图像中像素点之间的对应关系获得道路元素所对应的像素区域的三维数据;
9、根据各个道路元素所对应的像素区域的三维数据进行聚类,获得道路场景中道路元素的矢量化数据。
10、可选地,根据各个道路元素所对应的像素区域的三维数据进行聚类,获得道路场景中道路元素的矢量化数据,具体包括:
11、对各个道路元素所对应的像素区域的三维数据进行拼接,获得道路场景的三维数据;
12、使用聚类算法对所述道路场景的三维数据进行聚类获得聚类后的道路场景的三维数据;
13、对所述聚类后的道路场景的三维数据进行抽稀处理,获得道路场景中道路元素的矢量化数据。
14、可选地,所述实例分割模型基于语义分割模型和对比损失构建;所述聚类算法为密度聚类算法。
15、可选地,对所述聚类后的道路场景的三维数据进行抽稀处理,获得道路场景中道路元素的矢量化数据,具体包括:
16、当所述道路场景中道路元素的曲率大于预设阈值,使用第一抽稀算法对所述聚类后的道路元素的三维数据进行抽稀处理,获得道路元素的矢量化数据;
17、当所述道路场景中道路元素的曲率小于或等于预设阈值,使用第二抽稀算法对所述聚类后的道路元素的三维数据进行抽稀处理,获得道路元素的矢量化数据;
18、其中,所述第一抽稀算法和所述第二抽稀算法的参数不同。
19、可选地,根据所述三维标注点云和所述相机的外参,获得相机坐标系下的三维坐标点,具体包括:
20、将所述三维标注点云向量和所述相机的外参矩阵进行矢量乘法计算,获得所述相机坐标系下的三维坐标点向量;
21、可选地,根据所述相机坐标系下的三维坐标点和所述相机的内参获得所述相机坐标系下的二维坐标,具体包括:
22、将所述相机坐标系下的三维坐标点向量和所述相机的内参矩阵进行矢量乘法计算,获得所述相机坐标系下的二维坐标向量。
23、第二方面,本技术提供一种地图矢量化生成装置,包括:
24、获取模块,用于获取在同一时刻相机对标注场景进行拍摄时的目标标注图像和激光雷达对所述标注场景进行采集时的三维标注点云;
25、处理模块,用于根据所述三维标注点云和所述相机的外参,获得相机坐标系下的三维坐标点;根据所述相机坐标系下的三维坐标点和所述相机的内参获得所述相机坐标系下的二维坐标点;将所述相机坐标系下的二维坐标点和所述目标标注图像中像素点进行匹配,所述相机坐标系下的二维坐标点和所述目标标注图像中像素之间对应关系;根据所述相机坐标系下的二维坐标点和所述目标标注图像中像素点之间对应关系,获得三维空间中各个三维坐标点和图像中像素点之间的对应关系;获取采集车辆采集的道路场景的目标图像,将所述目标图像输入实例分割模型,得到所述道路场景中的道路元素所对应的像素区域;针对每个道路元素所对应的像素区域,使用所述道路元素所对应的像素区域和三维空间中各个三维坐标点和图像中像素点之间的对应关系获得道路元素所对应的像素区域的三维数据;根据各个道路元素所对应的像素区域的三维数据进行聚类,获得道路场景中道路元素的矢量化数据。
26、可选地,处理模块,具体用于:
27、对各个道路元素所对应的像素区域的三维数据进行拼接,获得道路场景的三维数据;
28、使用聚类算法对所述道路场景的三维数据进行聚类获得聚类后的道路场景的三维数据;
29、对所述聚类后的道路场景的三维数据进行抽稀处理,获得道路场景中道路元素的矢量化数据。
30、可选地,所述实例分割模型基于语义分割模型和对比损失构建;所述聚类算法为密度聚类算法。
31、可选地,处理模块,具体用于:
32、当所述道路场景中道路元素的曲率大于预设阈值,使用第一抽稀算法对所述聚类后的道路元素的三维数据进行抽稀处理,获得道路元素的矢量化数据;
33、当所述道路场景中道路元素的曲率小于或等于预设阈值,使用第二抽稀算法对所述聚类后的道路元素的三维数据进行抽稀处理,获得道路元素的矢量化数据;
34、其中,所述第一抽稀算法和所述第二抽稀算法的参数不同。
35、可选地,处理模块,具体用于:
36、将所述三维标注点云向量和所述相机的外参矩阵进行矢量乘法计算,获得所述相机坐标系下的三维坐标点向量;
37、可选地,处理模块,具体用于:
38、将所述相机坐标系下的三维坐标点向量和所述相机的内参矩阵进行矢量乘法计算,获得所述相机坐标系下的二维坐标向量。
39、第三方面,本技术提供一种服务器,包括:存储器和处理器;
40、所述存储器用于存储计算机程序;所述处理器用于根据所述存储器存储的计算机程序执行第一方面及第一方面任一种可能的设计中的地图矢量化生成方法。
41、第四方面,本技术提供一种计算机可读存储介质,计算机可读存储介质中存储有计算机程序,当服务器的至少一个处理器执行该计算机程序时,服务器执行第一方面及第一方面任一种可能的设计中的地图矢量化生成方法。
42、第五方面,本技术提供一种计算机程序产品,所述计算机程序产品包括计算机程序,当服务器的至少一个处理器执行该计算机程序时,服务器执行第一方面及第一方面任一种可能的设计中的地图矢量化生成方法。
43、本技术提供的地图矢量化生成方法、装置和服务器,通过获取相机和激光雷达在同一时刻对标注场景进行采集得到目标标注图像和三维标注点云;根据三维标注点云和相机的外参,获得相机坐标系下的三维坐标点;根据相机坐标系下的三维坐标点和相机的内参获得相机坐标系下的二维坐标点;将相机坐标系下的二维坐标点和目标标注图像中像素点进行匹配,得到相机坐标系下的二维坐标点和目标标注图像中像素之间对应关系;根据相机坐标系下的二维坐标点和目标标注图像中像素点之间对应关系,获得三维空间中各个三维坐标点和图像中像素点之间的对应关系;获取采集车辆采集的道路场景的目标图像,并将目标图像输入实例分割模型,得到道路场景中的道路元素所对应的像素区域;针对每个道路元素所对应的像素区域,使用道路元素所对应的像素区域和三维空间中各个三维坐标点和图像中像素点之间的对应关系获得道路元素所对应的像素区域的三维数据;根据各个道路元素所对应的像素区域的三维数据进行聚类,获得道路场景中道路元素的矢量化数据的手段,实现提升了该道路元素的标注效率和标注准确率效果。
- 还没有人留言评论。精彩留言会获得点赞!