一种领域泛化跌倒检测方法、电子设备及存储介质与流程
本发明涉及医疗设备及跌倒检测领域,尤其涉及一种领域泛化跌倒检测方法、电子设备及存储介质。
背景技术:
1、老年人跌倒是一个重要的公共卫生问题,它会导致人体的骨折或者昏迷等严重的后果。跌倒后躺在地板上的时间也是决定跌倒严重程度的关键因素之一。跌倒后的长时间卧地可能导致人体体温过低、肺炎和褥疮。越早检测并救治跌倒的人,其发病率和死亡率越低。因此,跌倒后的及时发现和救治是非常有必要的。
2、传统的跌倒检测方法通常采用基于可穿戴设备或者基于相机的解决方案。尽管这些方法取得了一些令人深刻的性能,但是它们的监测方式限制了它们在日常生活中的使用。基于穿戴式设备的解决方案需要用户佩戴传感器,这通常会影响用户的日常生活舒适度。此外,这类设备会因为用户忘记佩戴或者电池没电导致设备失效。基于相机的解决方案的性能受到光照强度的影响。此外,由于涉及到隐私问题,用户可能担忧其隐私泄露而拒绝安装相机。
3、为了解决传统方法的缺陷,研究人员提出基于无线信号的方法来进行跌倒检测。虽然基于毫米波雷达的跌倒检测研究已经取得了很大的进展,但是仍有一些基本问题需要讨论和解决,比如,不同用户的体型和动作模式不同,这导致了雷达数据上的分布差异,再如,雷达接收信号是环境中反射的集合,不同的环境布置也会影响雷达信号。由于训练数据和测试数据存在偏差,模型往往不能很好的推广到新用户和新环境中使用。
4、因此,如何提高跌倒检测系统在新领域中的泛化性,以适应不同用户的体型和动作模式,是一个需要解决的技术问题。
技术实现思路
1、本发明的目的是提供一种领域泛化跌倒检测方法,解决了现有技术中即使面对新用户、新环境、面对不同用户的体型和动作模式,也可有效的检测跌倒的问题。
2、为解决上述技术问题,根据一些实施例,第一方面,本发明提供了一种领域泛化跌倒检测方法,其特征在于,包括:
3、根据提取的雷达信号,获得雷达矩阵,对所述雷达矩阵进行数据处理,获得距离-速度热图;
4、数据预处理,将持续时间大于等于1s的所述距离-速度热图保存为一个样本,对一个样本中所有的所述距离-速度热图,使用归一化方法将雷达信号的值映射到0-1之间;
5、建立特征提取器fe,所述特征提取器fe采用3d卷积层构建的resnet结构的神经网络架构,将所述距离-速度热图序列作为3d信号,利用所述3d卷积提取3d信号的时空特征;
6、构建主分类器fc和子分类器所述主分类器fc和所述子分类器均为多层感知机架构的模型,以所述特征提取器的输出特征作为输出,用于预测动作类别;所述主分类器使用所有样本训练,所述子分类器使用所述子分类器对应领域的样本训练;
7、领域不变学习,所述特征提取器fe和所述主分类器fc作为跌倒检测模型的主干架构,通过最小化交叉熵损失函数,优化所述特征提取器和所述主分类器的参数;所述子分类器,用于优化子分类器的参数,和/或,优化特征提取器的参数,使得所述特征提取器提取的其它域的特征被该域的分类器准确识别;
8、数据增强,包括距离-速度翻转(rvf),时间-速度翻转(tvf)和距离移动(rs)。
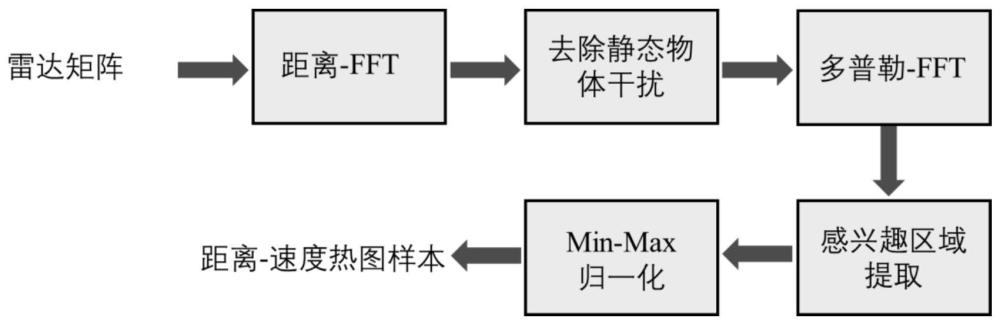
9、在一些实施例中,所述根据提取的雷达信号,获得雷达矩阵,对所述雷达矩阵进行数据处理,获得距离-速度热图,具体包括:
10、在一个雷达帧中,每个发射天线连续发射多个雷达信号,对每个所述雷达信号,进行fft变换,计算目标距离信息;
11、对每个所述雷达信号,将所述雷达信号减去一帧中所有信号的均值,以去除静态物体的干扰;
12、对所述多个雷达信号沿着信号数量的维度进行fft,获得距离-速度热图。
13、在一些实施例中,所述对一个样本中所有的所述距离-速度热图,使用归一化方法将雷达信号的值映射到0-1之间,具体包括:
14、对一个样本中的每个所述距离-速度热图,对速度维度求均值;
15、对每个样本,选择能量最大的距离坐标值;
16、将一帧中的所有距离坐标值求中值,作为锚点;
17、对一个样本中所有的信号,提取锚点前后1米的信号;
18、对一个样本中所有的距离-速度热图,使用min-max归一化方法将雷达信号的值映射到0-1之间。
19、在一些实施例中,所述使用min-max归一化方法将雷达信号的值映射到0-1之间,采用如下公式:
20、
21、其中,srv是一帧雷达信号的兴趣区域信号,sr′v是归一化后的信号。
22、在一些实施例中,所述特征提取器采用3d卷积层构建的resnet结构的神经网络架构,具体包括:
23、所述特征提取器包含4个残差块,共八个3d卷积层,所述卷积层的卷积核大小为3*3*3,其中,所述4个残差块的输出通道数分别为32,64,128,256。
24、在一些实施例中,所述4个残差块中的前3个残差块的步长为2*2*2。
25、在一些实施例中,所述子分类器对应了数据集中的领域,具体包括:每个领域均设置有一个对应的所述子分类器。
26、在一些实施例中,所述最小化交叉熵损失函数,表示为:
27、
28、其中和分别代表第i个域中的第j个样本和对应的标签,ni表示第i个域的样本量,"·"表示点积计算。
29、在一些实施例中,所述优化子分类器的参数,具体包括:
30、分别从k个训练域中采样,并训练每个域对应的所述子分类器,训练函数如下:
31、
32、其中,表示第i个训练域样本在子分类器下的条件分布,使得在所述子分类器的训练过程中,固定了所述特征提取器fe的参数,仅优化所述子分类器的参数。
33、在一些实施例中,所述优化特征提取器的参数,具体包括:
34、对于每个所述子分类器,将度量在其它域的数据在所述子分类器上的交叉熵作为熵正则化损失函数,并根据所述损失函数,优化所述特征提取器的参数,所述损失函数公式如下:
35、
36、在熵正则化损失ler训练模型的过程中,固定所述子分类器的参数,仅优化所述特征提取器的参数,使得所述特征提取器提取的其它域的特征可以被该域的所述分类器准确识别。
37、在一些实施例中,还包括,所述模型的总体优化目标如下:
38、l=lcls+α1lsub+α2ler
39、其中α1和α2是权重系数,lcls是分类损失,lsub是子分类器分类损失,ler是熵正则化损失。
40、在一些实施例中,所述距离-速度翻转(rvf),具体包括:
41、通过翻转信号的距离轴,改变信号图中的距离信息,并反转速度轴。
42、在一些实施例中,所述时间-速度翻转(tvf),具体包括:
43、同时翻转信号的时间轴和速度轴,模拟倒带的时间信号。
44、在一些实施例中,所述距离移动(rs),具体包括:
45、根据所述距离-速度热图的时间序列信号,对该段信号的所有所述距离-速度热图在所述距离轴上移动相同的距离。
46、第二方面,本发明实施例还提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现上述第一方面任一项所述方法的步骤。
47、第三方面,本发明实施例还提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述第一方面任一项所述方法的步骤。
48、本发明的上述技术方案至少具有如下有益的技术效果:
49、本发明使用毫米波雷达发射无线电信号,计算人体距离-速度热图,提出了一种领域泛化跌倒检测架构,包含一个特征提取器,一个主分类器和多个领域子分类器,本发明实施例的领域泛化跌倒检测方法所构建的模型,根据多个领域子分类器来度量特征的跨领域不变性,并结合交叉熵损失来提取任务相关的领域不变特征,模型以距离-速度热图作为输入,使用特征提取器提取特征,使用主分类器检测跌倒,因此,本发明的技术方案,可提高跌倒检测系统在新领域中的泛化性,以适应不同用户的体型和动作模式,且,本技术结合交叉熵损失来提取任务相关的领域不变特征,即使不同的环境布置也会影响雷达信号,可以很好的推广到新用户和新环境中使用,即使面对新用户、新环境、面对不同用户的体型和动作模式,也可有效的检测跌倒。
50、此外,本发明提出的三种基于雷达距离-速度热图序列的数据增强技术,可有效提高模型的泛化性和准确度。
- 还没有人留言评论。精彩留言会获得点赞!