一种基于听觉感知的重卡换电机构关键设备故障诊断方法与流程
本技术涉及新能源电动重卡换电,具体涉及一种基于听觉感知的重卡换电机构关键设备故障诊断方法。
背景技术:
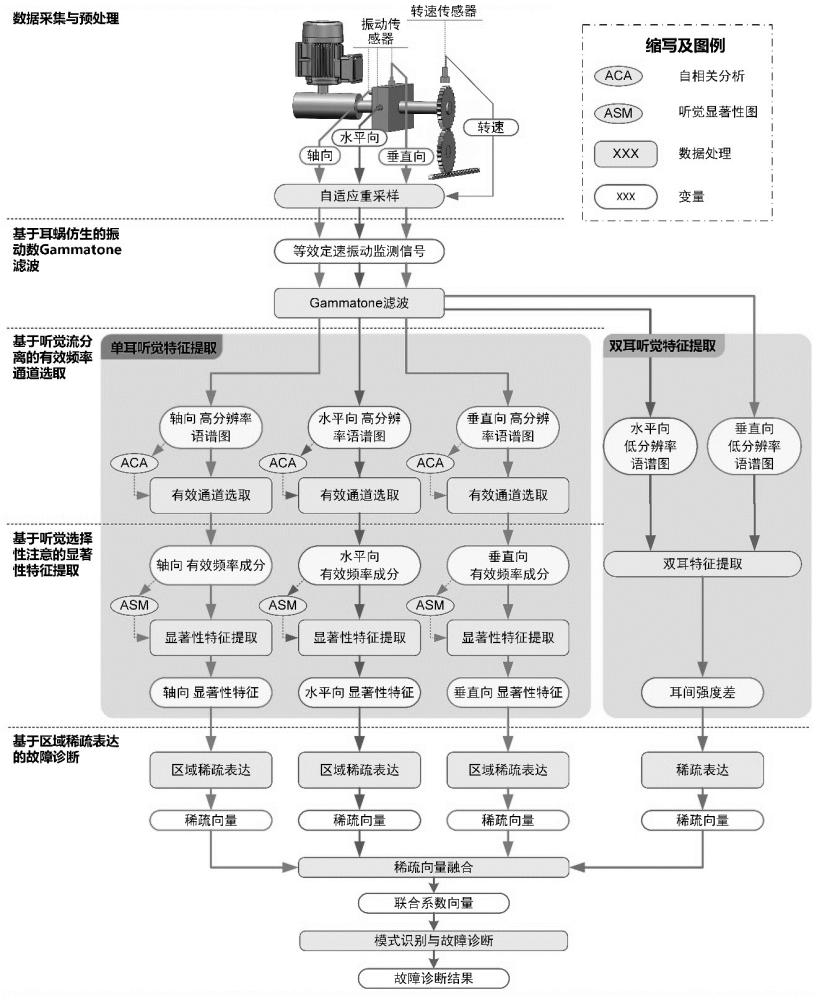
1、如图1所示,在电动重卡换电系统中,通常使用齿轮齿条驱动系统协助更换电动重卡的电池箱,所述齿轮齿条驱动系统中通过伺服电机控制驱动齿轮,驱动齿轮和齿条之间通过中间齿轮啮合。由于换电系统不可避免的处于带电状态,电蚀会导致齿轮齿条驱动系统故障频发,常见故障模式包括齿面磨损、齿面变形、疲劳损伤,甚至出现断齿等情况。作为动力传输枢纽,驱动齿轮故障易引发换电作业定位误差,导致电池触点接触不良,进而埋下局部发热乃至热失控风险;另一方面,严重情况下还会导致换电作业中断,极大影响了电动重卡营运效率,故需要对齿轮齿条驱动系统进行故障诊断,但驱动齿轮振动数据存在低转速、噪声复杂、转速波动的特点,给故障诊断带来了极大挑战。
2、现有的通过双级压缩感知针对齿轮齿条结构进行故障诊断的方法,由于涉及到较大比例的数据压缩,且未对转速波动进行针对性处理,因此故障诊断准确率较低。另外,现有技术中也有采用基于多尺度局部二值模式针对齿轮齿条结构故障诊断,该方法中虽然使用自适应降采样方法为处理转速波动下的振动信号提出了可行解决方案,然而,由于针对复杂噪声干扰的降噪能力有限,且对低转速造成的微弱故障特征提取能力不足,故障诊断准确率有待进一步提升。
技术实现思路
1、本发明的目的在于,提供一种基于听觉感知的重卡换电机构关键设备故障诊断方法,为低速往复运行、速度随机波动、复杂噪声干扰条件下的重卡换电机械设备故障诊断提供了解决方案,有效缩短电动重卡换电系统维护维修时间,提高整个车队的运营效率,保障车辆安全、可靠运营。
2、本发明采取的技术方案是:一种基于听觉感知的重卡换电机构关键设备故障诊断方法,包括如下步骤:
3、s1:自适应重采样:在每个转速采集周期内,采集换电机构中齿轮的水平向振动加速度、垂直向振动加速度、轴向振动加速度和齿轮实际转速,并确认齿轮基准转速;基于齿轮实际转速和齿轮基准转速对各个转速周期内的振动加速度进行自适应重采样,将自适应重采样后的振动加速度按顺序相互连接,获取等效定速振动监测信号;
4、s2:gammatone滤波:将所述等效定速振动监测信号输入gammatone滤波器组进行处理,获取垂直向高分辨率语谱图、水平向高分辨率语谱图、轴向高分辨率语谱图、垂直向低分辨率语谱图和水平向低分辨率语谱图;
5、s3:有效频率通道选取及显著性特征提取:选取垂直向高分辨率语谱图、水平向高分辨率语谱图和轴向高分辨率语谱图中的有效通道进行单耳听觉特征提取,生成垂直显著性特征矩阵、水平显著性特征矩阵和轴向显著性特征矩阵;
6、s4:双耳特征提取:使用垂直向低分辨率语谱图和水平向低分辨率语谱图进行双耳听觉特征提取,生成耳间强度差特征;
7、s5:稀疏表达:分别对垂直显著性特征矩阵、水平显著性特征矩阵、轴向显著性特征矩阵进行区域稀疏表达处理,即先对垂直显著性特征矩阵、水平显著性特征矩阵和轴向显著性特征矩阵进行有效区域提取,再对有效区域进行稀疏表达处理,得到垂直稀疏向量、水平稀疏向量和轴向稀疏向量;对耳间强度差特征则直接进行稀疏表达处理,生成关联稀疏向量;将四种稀疏向量进行融合生成联合系数向量,并以联合系数向量的权重分布向量中最大权重值所对应的模式作为故障诊断结果。
8、进一步地,所述步骤s1的具体步骤为:
9、s101:使用传感器检测水平向振动加速度、垂直向振动加速度、轴向振动加速度和齿轮实际转速;
10、s102:确定齿轮基准转速vb,vb≥max(vstp_i),i=1,2,…,nstp,其中,vstp_i表示准匀速阶段通过传感器的第i个单齿的实际转速,nstp表示准匀速阶段通过传感器的齿轮齿数;
11、假设任意通道的振动加速度记为xt,其中,xstp_i表示准匀速阶段通过传感器的第i个单齿的振动加速度信号序列;
12、s103:根据实际转速vstp_i和基准转速vb计算第i个单齿的重采样率ratioi,具体计算方法为:其中,ratioi∈(0,1);
13、s104:利用重采样函数对第i个单齿的振动加速度xstp_i进行自适应重采样,获取第i个单齿重采样后的振动加速度xrs_i:
14、xrs_i=resample(xstp_i,ratioi);
15、其中,resample()表示重采样函数;
16、s105:将自适应重采样后的振动加速度按顺序相互连接,获取等效定速振动监测信号xrs,长度为n,其中,n=tstp×sr×nstp,tstp表示单齿通过传感器的时间,sr表示信号采样率:
17、
18、进一步地,所述步骤s2的具体步骤为:
19、s201:采用重叠滑窗处理所述等效定速振动监测信号xrs,生成垂直向高分辨率语谱图、水平向高分辨率语谱图、轴向高分辨率语谱图;所述重叠滑窗的滑窗宽度tw1小于单齿通过传感器的时间tstp,滑窗步长ts1小于滑窗宽度tw1;
20、单齿通过传感器的时间其中,ndgt为齿轮的齿数;
21、生成的高分辨率语谱图的大小为nc1×nf1,nc1表示高分辨率语谱图的频率通道数,每个频率通道中,时间帧数为nf1,其中,n为等效定速振动监测信号的长度,sr为信号采样率;
22、s202:采用常规滑窗对处理所述等效定速振动监测信号xrs,生成垂直向低分辨率语谱图和水平向低分辨率语谱图;所述常规滑窗的滑窗宽度tw2和滑窗步长ts2均等于单齿通过传感器的时间tstp;
23、生成的低分辨率语谱图的大小为nc2×nf2,nc2表示低分辨率语谱图的频率通道数,每个频率通道中,时间帧数为nf2,
24、进一步地,所述步骤s3的具体步骤为:
25、s301:提取高分辨率语谱图的每个自相关序列,并将所有频率通道的自相关序列构成自相关矩阵,记为mac,矩阵大小为nc1×(2nf1-1):
26、
27、其中,rj(m)表示高分辨率语谱图第j个频率通道cj的自相关序列,j=1,2,…,nc1,m表示自相关序列的偏移量,cj,(n+m)表示高分辨率语谱图中第j个通道的第(n+m)帧,cj,n表示高分辨率语谱图中第j个通道的第n帧;
28、s302:对自相关矩阵mac进行二值化处理,生成二值矩阵mbi:mbi=fbi(mac,th1),其中,fbi()表示二值化函数,th1表示全局图像阈值;所述二值化函数将自相关矩阵mac中数值大于全局图像阈值的位置像素标记为1,反之标记为0;
29、s303:对二值矩阵mbi按行求和,即将每个通道上的布尔量求和,得到和值向量sbi,使用和值向量sbi对高分辨率语谱图频率通道的有效性进行标记,将和值向量sbi中数值为0的元素对应的频率通道置为0,从而获取有效频率通道组成的有效通道矩阵mec;
30、s304:将所述有效通道矩阵mec向量化,其中,vec表示有效通道向量,f1()是矩阵转换函数,将有效通道矩阵mec按列转换为向量;
31、s305:对有效通道向量vec进行非零元素筛选,获得非零元素向量vnz和非零元素所对应的位置索引向量pnz:[vnz,pnz]=f2(vec),其中,f2()表示非零元素搜索函数,ak表示第k个非零元素,pk表示第k个非零元素的位置,k=1,2,…,nnz,nnz表示非零元素向量vnz中的元素总数;将显著性向量vsal进行初始化,即vsal=(0 0 … 0)t,显著性向量vsal的长度为nc1×nf1;计算非零元素向量vnz中每个元素对应的显著性值,并将所述显著性值填入显著性向量vsal的对应位置,具体公式为:
32、
33、其中,vsal(pk)表示显著性向量vsal中第pk个位置的数值,ak表示非零元素向量vnz中的第k个元素,al表示非零元素向量vnz中的第l个元素;l=1,2,…,nnz,nnz表示非零元素向量vnz中的元素总数;
34、s306:使用矩阵转换函数f1()的反函数f1-1()将显著性向量vsal转化成显著性图masm,
35、s307:对显著性向量vsal进行非零元素筛选,得到筛选后的显著性向量其中,θk表示筛选后的显著性向量vsalnz中的第k个元素,即非零元素向量vnz中第k个元素所对应的显著性值;将筛选后的显著性向量vsalnz中的元素按照降序排列,获得排列后的显著性向量其中,θk′表示排列后的显著性向量vsalnz′中的第k个元素;计算kth=round(nnz·thsal),将排列后的显著性向量vsal′中第kth个元素作为稀疏性阈值,其中,thsal是显著性级别阈值,kth是按照从高到低排列的显著度值的序号,round()表示四舍五入函数;
36、s308:基于稀疏性阈值获取有效通道矩阵mec对应的显著性特征矩阵msal,其中,sjr表示显著性特征矩阵msal中第j行第r列的元素,cjr表示有效通道矩阵mec中第j行第r列的元素,ξjr表示显著性图masm中第j行第r列的元素,r=1,2,…,nf1。
37、进一步地,所述耳间强度差特征vild的计算公式为:
38、
39、
40、其中,βo表示第o个通道的耳间强度差,cv,o表示垂直向低分辨率语谱图mlcg_v中的第o个通道,ch,o表示水平向低分辨率语谱图mlcg_h中的第o个通道,o=1,2,…,nc2。
41、进一步地,所述步骤s5中有效区域提取的具体步骤为:
42、s501:确定测试样本的显著性特征矩阵的非零元素边界,将非零边界内的部分记为有效区域;
43、s502:利用所确定的非零元素边界,对构成字典原子的显著性特征矩阵做同区域划分,将带标签的模式已知的标签样本的显著性特征矩阵中在非零边界内的部分记为有效区域;
44、s503:将测试样本与标签样本的显著性特征矩阵的有效区域转换为向量,用于计算稀疏向量。
45、进一步地,所述步骤s5中,采用基于批次匹配追踪算法bmp计算稀疏向量,所述基于批次匹配追踪算法bmp是在正交匹配追踪算法omp的基础上,每次迭代选取nsv个数值,其中nsv≥2,其余步骤与正交匹配追踪算法omp相同。
46、进一步地,所述步骤s5中生成联合稀疏向量,并以联合稀疏向量的权重分布向量中最大权重值所对应的模式作为故障诊断结果的具体步骤为:
47、s504:将四种稀疏向量进行融合生成联合稀疏向量k1=a,h,v,ild,其中,表示轴向稀疏向量,表示水平向稀疏向量,表示垂直稀疏向量,表示关联稀疏向量:
48、
49、其中,αtu表示联合稀疏向量中第t种模式下第u个标签样本的元素,t=1,2,…,p,u=1,2,…,q,p表示模式总数量,q表示稀疏表达算法的字典矩阵中单模式标签样本数量;
50、s505:利用获取权重分布向量w=(w1 w2 … wt … wp)t;其中,w表示权重分布向量,wt表示第t种模式的权重,wt的大小等于稀疏向量中与第t种模式位置对应的所有非零元素的总和,即
51、s506:权重分布向量w中最大权重值所对应的模式作为故障诊断结果pattern,pattern=t,s.t.max(wt)。
52、本发明的有益效果在于:
53、(1)本发明针对电动重卡换电作业过程中,换电系统关键部件故障诊断时存在的低速往复运行、速度随机波动、复杂噪声干扰问题,基于听觉感知机制的基本流程,提出了完整的故障诊断框架,包括自适应重采样、gammatone滤波、有效频率通道选取、显著性特征提取、双耳特征提取、区域稀疏表达。本发明所提出的方法优势在于将人听觉机制的低频敏感性及抗干扰能力应用于换电过程中齿轮齿条驱动系统的故障诊断,在一定程度上解决了多种复杂工况耦合条件下关键部件故障诊断的问题;同时,结合语谱图的有效通道分布,改进了听觉显著性特征提取方法,及稀疏表达方法,提高了算法运算效率;
54、(2)为了实现低转速条件下的有效故障特征提取,本发明采用振动信号增强分析法,充分考虑信号的相对显著性特征,以及多传感器之间的关联特征;针对噪声具有频率不确定性及多源混合性特点,本发明采用从复杂信号中提取有效频段信号的方式进行降噪,而不是采用去除特定频段噪声的方式;为了避免转速波动对故障诊断的影响,本发明结合齿轮齿条监测信号特点,基于霍尔转速脉冲信号,对所采集的振动监测信号进行自适应重采样处理;
55、(3)本发明对现有稀疏表达算法进行改进,提出一种区域稀疏表达方法,并利用所述区域稀疏表达方法实现驱动齿轮的故障诊断;基于所构建的冗余字典矩阵,区域稀疏表达利用冗余字典矩阵中原子的线性组合来表达测试样本;结合单耳显著性特征和耳间强度差特征,采用区域稀疏表达进行故障诊断,实现异构特征下稀疏向量的融合,提高故障诊断的精度,同时无需训练过程,提高了模式识别的效率。
- 还没有人留言评论。精彩留言会获得点赞!