目标检测方法、交通标志检测方法、装置及计算设备与流程
本发明涉及目标检测,尤其涉及一种目标检测方法、交通标志检测方法、装置及计算设备。
背景技术:
1、感知定位是自动驾驶系统的重要一环,在没有高清地图辅助的情况下,自动驾驶系统进行感知定位可以帮助无人车准确定位到自己的位置,而高精度的感知定位是决定自动驾驶系统能否良好运行的关键。近年来,随着深度学习的发展,视觉感知成为自动驾驶系统的关键应用。具体来讲是利用传感器的数据识别物理对象,其中包括对象的种类、位置和属性,这些信息可以为下游控制系统提供先验的知识,从而实现车辆的控制。其中,定位感知就是视觉感知的重要体现,它可以在图像数据中准确识别出车辆周围物体的关键点,并将这些关键点信息提供给下游控制模块,实现车辆的定位和路径规划等功能。
2、目前,大多数的感知定位是从图像数据中预测目标的目标框和目标类别,并将这些信息提供给下游控制系统。但对于目标大小类别多样、背景目标和前景目标交替混杂的场景,由于车辆在行驶过程中,混杂的目标会出现扭曲变形,这使得大多数感知定位算法的稳定性较差,容易出现误识别的情况。
技术实现思路
1、为此,本发明提出了一种目标检测方法,还提出了一种交通标志检测方法、一种目标检测装置、一种交通标志检测装置、一种计算设备和一种计算机可读存储介质,旨在至少在一定程度上解决相关技术中目标识别准确性低的技术问题。
2、为达到上述目的,本发明第一方面实施例提出了一种目标检测方法,该方法包括:
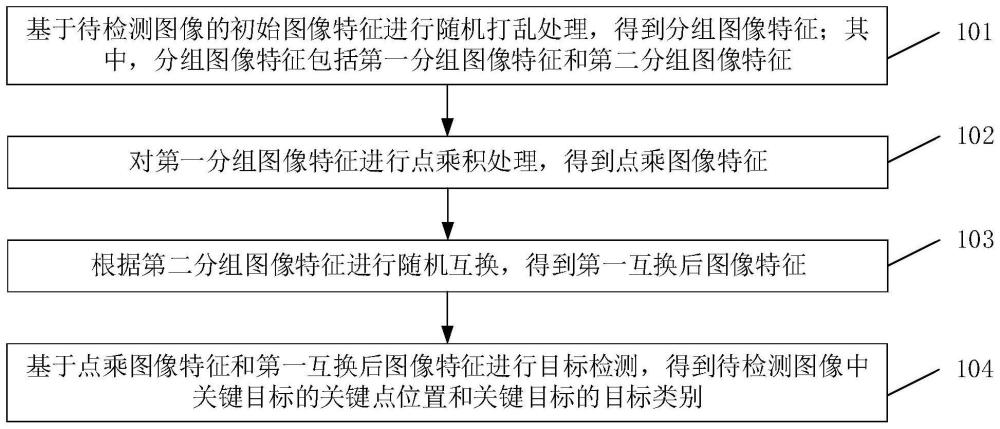
3、基于待检测图像的初始图像特征进行随机打乱处理,得到分组图像特征;其中,分组图像特征包括第一分组图像特征和第二分组图像特征;
4、对第一分组图像特征进行点乘积处理,得到点乘图像特征;
5、根据第二分组图像特征进行随机互换,得到第一互换后图像特征;
6、基于点乘图像特征和第一互换后图像特征进行目标检测,得到待检测图像中关键目标的关键点位置和关键目标的目标类别。
7、根据本发明的一个实施例,初始图像特征是对待检测图像的图像特征进行降维处理得到的降维图像特征;基于点乘图像特征和第一互换后图像特征进行目标检测,得到待检测图像中关键目标的关键点位置和关键目标的目标类别,包括:
8、对点乘图像特征和第一互换后图像特征进行升维处理,得到升维图像特征;
9、将升维图像特征与待检测图像的图像特征进行拼接,得到第一拼接图像特征;
10、基于第一拼接图像特征进行目标检测,得到待检测图像中关键目标的关键点位置和关键目标的目标类别。
11、根据本发明的一个实施例,基于第一拼接图像特征进行目标检测,得到待检测图像中关键目标的关键点位置和关键目标的目标类别,包括:
12、基于第一拼接图像特征进行点乘积处理和随机互换,得到第二互换后图像特征;
13、将第二互换后图像特征与第一拼接图像特征进行拼接,得到第二拼接图像特征;
14、基于第一拼接图像特征和第二拼接图像特征进行多尺度特征融合和跳跃连接处理,得到融合图像特征;
15、基于融合图像特征确定待检测图像中关键目标的关键点位置和关键目标的目标类别。
16、根据本发明的一个实施例,基于第一拼接图像特征和第二拼接图像特征进行多尺度特征融合和跳跃连接处理,得到融合图像特征,包括:
17、对第二拼接图像特征进行尺度不变的采样处理,得到采样后图像特征;
18、将采样后图像特征与第一拼接图像特征进行拼接,得到第三拼接图像特征;
19、基于第三拼接图像特征进行点乘积和随机互换,得到融合图像特征。
20、根据本发明的一个实施例,在基于融合图像特征确定待检测图像中关键目标的关键点位置和关键目标的目标类别之前,还包括:
21、将多帧待检测图像的融合图像特征与预设图像特征进行跨模态交互,得到目标图像特征,其中,目标图像特征包括待检测图像中目标的时空特征;
22、相应地,基于融合图像特征确定待检测图像中关键目标的关键点位置和关键目标的目标类别,包括:
23、基于目标图像特征确定待检测图像中关键目标的关键点位置和关键目标的目标类别。
24、根据本发明的一个实施例,基于融合图像特征确定待检测图像中关键目标的关键点位置和关键目标的目标类别,包括:
25、通过卷积层对融合图像特征进行属性提取处理,得到待检测图像中目标的属性信息;
26、基于属性信息确定待检测图像中关键目标的关键点位置和关键目标的目标类别。
27、根据本发明的一个实施例,属性信息包括各目标的目标框和目标类别、以及各目标中角点的角点类别、角点位置和角点置信度;基于属性信息确定待检测图像中关键目标的关键点位置和关键目标的目标类别,包括:
28、根据各目标的目标框、各目标中角点的角点类别和角点置信度,确定关键目标和关键目标中的关键点;
29、根据各目标中角点的角点位置,确定关键目标的关键点位置;
30、根据各目标的目标类别,确定关键目标的目标类别。
31、为达到上述目的,本发明第二方面实施例提供了一种交通标志检测方法,方法包括:
32、基于指定场景图像的初始图像特征进行随机打乱处理,得到分组图像特征;其中,分组图像特征包括第一分组图像特征和第二分组图像特征;指定场景图像为泊车场景图像或者行车场景图像;
33、对第一分组图像特征进行点乘积处理,得到点乘图像特征;
34、根据第二分组图像特征进行随机互换,得到第一互换后图像特征;
35、基于点乘图像特征和第一互换后图像特征进行目标检测,得到指定场景图像中交通标志的关键点位置和交通标志的目标类别。
36、为达到上述目的,本发明第三方面实施例提供了一种目标检测装置,该装置包括:
37、第一处理模块,被配置为基于待检测图像的初始图像特征进行随机打乱处理,得到分组图像特征;其中,分组图像特征包括第一分组图像特征和第二分组图像特征;
38、第二处理模块,被配置为对第一分组图像特征进行点乘积处理,得到点乘图像特征;
39、第三处理模块,被配置为根据第二分组图像特征进行随机互换,得到第一互换后图像特征;
40、目标检测模块,被配置为基于点乘图像特征和第一互换后图像特征进行目标检测,得到待检测图像中关键目标的关键点位置和关键目标的目标类别。
41、为达到上述目的,本发明第四方面实施例提供了一种交通标志检测装置,装置包括:
42、第四处理模块,被配置为基于指定场景图像的初始图像特征进行随机打乱处理,得到分组图像特征;其中,分组图像特征包括第一分组图像特征和第二分组图像特征;指定场景图像为泊车场景图像或者行车场景图像;
43、第五处理模块,被配置为对第一分组图像特征进行点乘积处理,得到点乘图像特征;
44、第六处理模块,被配置为根据第二分组图像特征进行随机互换,得到第一互换后图像特征;
45、交通标志检测模块,被配置为基于点乘图像特征和第一互换后图像特征进行目标检测,得到指定场景图像中交通标志的关键点位置和交通标志的目标类别。
46、为达到上述目的,本发明第五方面实施例提供了一种计算设备,该计算设备包括:存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,该处理器执行计算机程序时,实现如上述第一方面任一项所述的目标检测方法,或实现如上述第二方面任一项所述的交通标志检测方法。
47、为达到上述目的,本发明第六方面实施例提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如上述第一方面任一项所述的目标检测方法,或实现如上述第二方面任一项所述的交通标志检测方法。
48、本发明实施例提供的目标检测方法,基于待检测图像的初始图像特征进行随机打乱处理,得到分组图像特征;其中,分组图像特征包括第一分组图像特征和第二分组图像特征;对第一分组图像特征进行点乘积处理,得到点乘图像特征;根据第二分组图像特征进行随机互换,得到第一互换后图像特征;基于点乘图像特征和第一互换后图像特征进行目标检测,得到待检测图像中关键目标的关键点位置和关键目标的目标类别。上述方法对初始图像特征中部分图像特征进行点乘积处理,而对部分图像特征进行随机互换,不仅提取了有效的深度图像特征,而且保留了待检测图像的部分浅层图像特征,减少了特征冗余,有效地保证了特征的连续性和规则性,加快了特征提取的速度,提高了特征提取的准确性,则基于该提取的特征进行目标检测,提高了目标检测的效率和准确性。
49、本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!