导线树障的检测方法、装置、计算机设备及存储介质与流程
本技术涉及输电线路安全,尤其涉及一种导线树障的检测方法、装置、计算机设备及存储介质。
背景技术:
1、树障是野外输电线路系统安全稳定运行的重大隐患之一,是电力系统日常运维巡检工作的重点任务。目前在电力系统运维中检测树障方法有:
2、1、通过激光雷达设备对电力系统进行扫描,获取到输电线路各部件及附近树木的三维点云数据。根据人为或自动的方法分类出点云中的导线点和树木点,再搜索导线类点云到树木点之间的最近距离进而给出树障预警。
3、2、通过双目图像立体视觉算法,利用左右视图视差重建出输电线路和导线点云,根据图像识别技术分类出导线点云和树木点云,搜索导线类点云到树木点之间的最近距离进而给出树障预警。
4、在使用激光点云数据判断树障预警的方法中,需要通过无人机等设备搭载激光雷达对输电线路通道进行扫描然后进行点云分类,该方法存在的问题有:(1)激光雷达设备昂贵,获取点云的方法过程操作复杂,(2)点云分类过程需要人为干预,无法实现点云自动精确分类,(3)激光点云数据无法多次复用。
5、在双目图像立体视觉树障预警方法中,由于该算法要求左右相机的主光轴平行,左右视图位于一个平面上,故该算法的实施过程需要按照严格操作规范,这些因素使该算法适应性大为下降。综上,双目图像立体视觉树障预警算法不能适用于大场景下输电线路树障预警,且该方法对设备安装条件要求严格,实施过程操作复杂,适用性较低。
技术实现思路
1、本技术的主要目的在于提供一种导线树障的检测方法、装置、计算机设备及存储介质,可以解决现有技术中对输电线路树障判断所需设备昂贵,操作复杂,适用性低的技术问题。
2、为实现上述目的,本技术第一方面提供一种导线树障的检测方法,该方法包括:
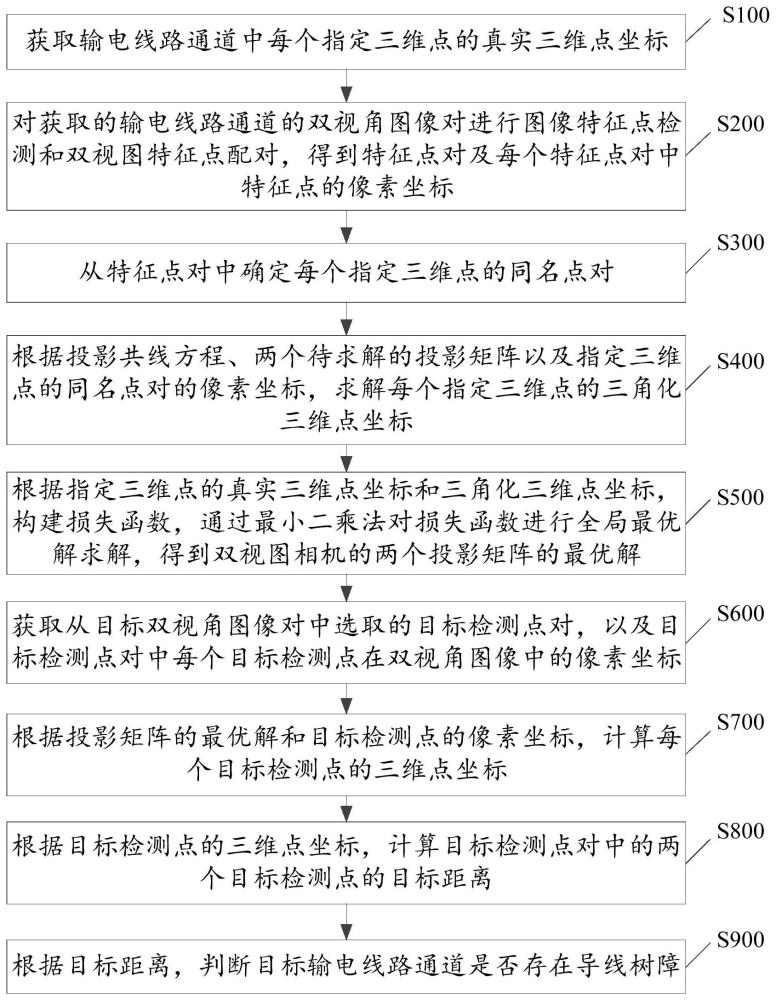
3、获取输电线路通道中每个指定三维点的真实三维点坐标;
4、对获取的输电线路通道的双视角图像对进行图像特征点检测和双视图特征点配对,得到特征点对及每个特征点对中特征点的像素坐标;
5、从特征点对中确定每个指定三维点的同名点对;
6、根据投影共线方程、两个待求解的投影矩阵以及指定三维点的同名点对的像素坐标,求解每个指定三维点的三角化三维点坐标;
7、根据指定三维点的真实三维点坐标和三角化三维点坐标,构建损失函数,通过最小二乘法对损失函数进行全局最优解求解,得到双视图相机的两个投影矩阵的最优解;
8、获取从目标双视角图像对中选取的目标检测点对,以及目标检测点对中每个目标检测点在双视角图像中的像素坐标;
9、根据投影矩阵的最优解和目标检测点的像素坐标,计算每个目标检测点的三维点坐标;
10、根据目标检测点的三维点坐标,计算目标检测点对中的两个目标检测点的目标距离;
11、根据目标距离,判断对应的目标输电线路通道是否存在导线树障。
12、为实现上述目的,本技术第二方面提供一种导线树障的检测装置,该装置包括:
13、真实坐标获取模块块,用于获取输电线路通道中每个指定三维点的真实三维点坐标;
14、特征点匹配模块,用于对获取的输电线路通道的双视角图像对进行图像特征点检测和双视图特征点配对,得到特征点对及每个特征点对中特征点的像素坐标;
15、同名点匹配模块,用于从特征点对中确定每个指定三维点的同名点对;
16、三角化模块,用于根据投影共线方程、两个待求解的投影矩阵以及指定三维点的同名点对的像素坐标,求解每个指定三维点的三角化三维点坐标;
17、优化模块,用于根据指定三维点的真实三维点坐标和三角化三维点坐标,构建损失函数,通过最小二乘法对损失函数进行全局最优解求解,得到双视图相机的两个投影矩阵的最优解;
18、目标检测点获取模块,用于获取从目标双视角图像对中选取的目标检测点对,以及目标检测点对中每个目标检测点在双视角图像中的像素坐标;
19、三维坐标计算模块,用于根据投影矩阵的最优解和目标检测点的像素坐标,计算每个目标检测点的三维点坐标;
20、距离计算模块,用于根据目标检测点的三维点坐标,计算目标检测点对中的两个目标检测点的目标距离;
21、判断模块,用于根据目标距离,判断对应的目标输电线路通道是否存在导线树障。
22、为实现上述目的,本技术第三方面提供一种计算机可读存储介质,存储有计算机程序,计算机程序被处理器执行时,使得处理器执行以下步骤:
23、获取输电线路通道中每个指定三维点的真实三维点坐标;
24、对获取的输电线路通道的双视角图像对进行图像特征点检测和双视图特征点配对,得到特征点对及每个特征点对中特征点的像素坐标;
25、从特征点对中确定每个指定三维点的同名点对;
26、根据投影共线方程、两个待求解的投影矩阵以及指定三维点的同名点对的像素坐标,求解每个指定三维点的三角化三维点坐标;
27、根据指定三维点的真实三维点坐标和三角化三维点坐标,构建损失函数,通过最小二乘法对损失函数进行全局最优解求解,得到双视图相机的两个投影矩阵的最优解;
28、获取从目标双视角图像对中选取的目标检测点对,以及目标检测点对中每个目标检测点在双视角图像中的像素坐标;
29、根据投影矩阵的最优解和目标检测点的像素坐标,计算每个目标检测点的三维点坐标;
30、根据目标检测点的三维点坐标,计算目标检测点对中的两个目标检测点的目标距离;
31、根据目标距离,判断对应的目标输电线路通道是否存在导线树障。
32、为实现上述目的,本技术第四方面提供一种计算机设备,包括存储器和处理器,存储器存储有计算机程序,计算机程序被处理器执行时,使得处理器执行以下步骤:
33、获取输电线路通道中每个指定三维点的真实三维点坐标;
34、对获取的输电线路通道的双视角图像对进行图像特征点检测和双视图特征点配对,得到特征点对及每个特征点对中特征点的像素坐标;
35、从特征点对中确定每个指定三维点的同名点对;
36、根据投影共线方程、两个待求解的投影矩阵以及指定三维点的同名点对的像素坐标,求解每个指定三维点的三角化三维点坐标;
37、根据指定三维点的真实三维点坐标和三角化三维点坐标,构建损失函数,通过最小二乘法对损失函数进行全局最优解求解,得到双视图相机的两个投影矩阵的最优解;
38、获取从目标双视角图像对中选取的目标检测点对,以及目标检测点对中每个目标检测点在双视角图像中的像素坐标;
39、根据投影矩阵的最优解和目标检测点的像素坐标,计算每个目标检测点的三维点坐标;
40、根据目标检测点的三维点坐标,计算目标检测点对中的两个目标检测点的目标距离;
41、根据目标距离,判断对应的目标输电线路通道是否存在导线树障。
42、采用本技术实施例,具有如下有益效果:
43、本技术利用场景中指定三维点的三维坐标和双视角图像中指定三维点的二维坐标,以三角化误差为代价构建损失函数,通过最小二乘法优化双视图相机的两个投影矩阵,求解的最优投影矩阵可以有效降低三角化坐标误差,进而减小下游测距任务中的误差,保证三角化坐标点测距精度,适用于大场景下输电线路树障预警,适用性高。本技术不需要通过激光点云技术进行树障判断和预警,因此,可以节省设备成本,也可以有效避免复杂操作和人为干预,实现树障判断的自动化。本实施例无需在两个图像之间进行密集匹配重建视差图,无需对相机安装位置和朝向进行严格要求,免去了现有技术中对双目图像视觉树障预警中的严格操作规范的约束,大大提高了双目图像视觉在树障预警中的适应性,降低了复杂性。
- 还没有人留言评论。精彩留言会获得点赞!