基于视觉分析的农作物叶面虫情分析模块及方法与流程
本发明涉及农作物叶面虫情视觉分析,尤其是涉及基于视觉分析的农作物叶面虫情分析模块及方法。
背景技术:
1、农作物害虫是造成农作物损失的罪魁祸首。针对不同的害虫有不同的防治策略,精确识别害虫已成为害虫防治的关键,也是农业的一大难点。
2、现有的农作物虫情视觉监测主要是采用灯光诱捕的方式,对诱捕后的各种不同的虫体进行视觉拍摄,根据拍摄的视觉画面采用视觉算法来进行虫情分析,再根据分析结果来制定防治策略。
3、公开号为cn115005172a的中国发明专利申请公开了一种智慧农业植保防控系统,包括诱杀单元、视觉识别单元和通信定位单元;诱杀单元,包括不少于三组呈辐射性布置的挡虫板,相邻两组挡虫板的相邻面分别反射不同频谱区域的光线;还包括用于击杀昆虫的电击网,和处于底部用于承接虫尸的采集板;诱杀单元外部设置有高度可调且能够改变光源出射高度或阻挡对应高度区域内飞虫进入的遮蔽罩;视觉识别单元,包括用于对采集板上表面虫尸进行种类识别和数量统计的摄像头;有效扩大诱杀范围,且能够对不同方向和高度的虫情进行分类统计分析,并与执行喷洒药物的无人机进行联动,从而对特定区域进行针对性作业,降低农药使用量,保证食品安全。
4、然而,目前这种虫情分析结果受到诱捕结果的影响,例如某种害虫如果不受诱捕,那么就不会被视觉分析到,从而在后续的防治策略中也不会被考虑到,因此要开发一种基于农作物叶面直接进行视觉拍摄,并基于拍摄结果进行虫情分析的方案,解决诱捕式虫情监测系统的技术问题。
技术实现思路
1、为了解决上述技术问题,本发明提供基于视觉分析的农作物叶面虫情分析模块及方法。采用如下的技术方案:
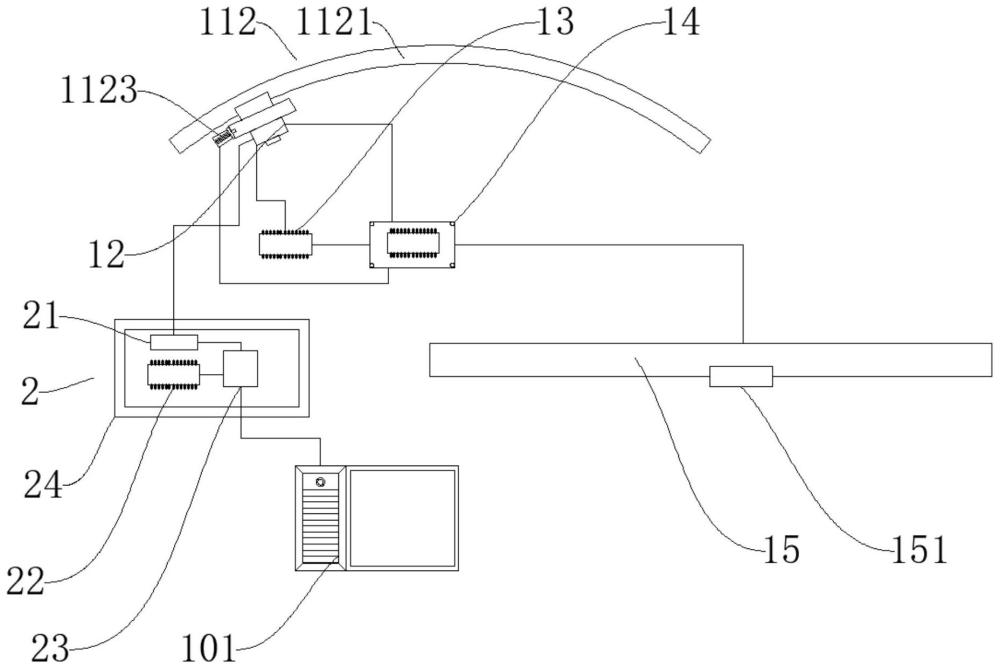
2、基于视觉分析的农作物叶面虫情分析模块,包括至少一个农作物叶面视觉采集单元和虫情视觉分析模块,所述农作物叶面视觉采集单元包括视觉角度调节机构、视觉相机、第一视觉分析芯片和控制芯片,所述视觉角度调节机构安装在待检测农作物上方,视觉角度调节机构设有旋转活动块,所述旋转活动块环绕待检测农作物活动,所述视觉相机安装在旋转活动块下表面,用于拍摄待检测农作物的视觉画面,并与第一视觉分析芯片通信连接,所述第一视觉分析芯片与控制芯片通信连接,控制芯片根据第一视觉分析芯片的叶面特征分析结果控制视觉角度调节机构的旋转活动块执行动作,并控制视觉相机的执行动作,使视觉相机至少拍摄到待检测农作物的设定数量的完整叶面,所述视觉相机的数据输出端与虫情视觉分析模块通信连接,虫情视觉分析模块根据视觉相机的拍摄画面,采用视觉特征识别算法对完整叶面进行框选,并基于框选区域进行虫情视觉分析。
3、通过采用上述技术方案,由于传统的视觉检测,都是采用相机对待检测农作物正上方或固定角度进行拍摄,基于拍摄的画面可以进行虫情分析等,会导致虫情分析结果过于片面,且不能保证能获取足够多的完整叶面用于视觉分析,农作物叶面视觉采集单元的设计思路是需要对待检测农作物上方进行不同角度的拍摄,可以在控制芯片的控制下,通过旋转活动块的位置变化,从而实现安装在其上的视觉相机对待检测农作物不同角度进行拍摄,对于每次拍摄的画面均传输给第一视觉分析芯片,第一视觉分析芯片对拍摄的画面进行叶面特征分析,当分析得到的完整叶面数量大于设定的完整叶面数量阈值时,意味着这个角度的拍摄画面可以用于后续的虫情分析,就将拍摄的画面传输给虫情视觉分析模块,虫情视觉分析模块先采用视觉特征识别算法对完整叶面进行框选,并基于框选区域进行虫情视觉分析,虫情分析可以基于设置的害虫特征数据库的比对来进行。
4、通过虫情分析就可以对区域内的多个待检测农作物的虫害情况全面地了解,避免采用诱捕后视觉分析导致的虫情分析结果受诱捕结果影响的缺陷,使虫情分析更加全面。
5、可选的,农作物叶面视觉采集单元还包括农作物随机选择装置,所述农作物随机选择装置是电动十字滑台,农作物随机选择装置的轨道通过支架安装在待检测农作物上方,所述视觉角度调节机构安装在农作物随机选择装置的滑块上,并跟随滑块在待检测农作物上方移动,控制芯片控制农作物随机选择装置的执行动作,通过滑块的移动实现不同待检测农作物之间的移动。
6、通过采用上述技术方案,农作物随机选择装置的作用是可以实现在多个待检测农作物上方进行随机的移动,具体的控制方法可以是先将多个待检测农作物进行编号,编号代表着固定的位置,控制芯片采用随机数生成算法来随机产生一个编号数,再控制电动十字滑台的滑块移动到该编号待检测农作物的上方,从而可以实现对多个待检测农作物的随机抽样虫情分析。
7、可选的,视觉角度调节机构包括连接块、弧形电动滑台和活动块,所述连接块的顶面可拆卸安装在农作物随机选择装置的滑块底面上,并跟随滑块移动,所述弧形电动滑台的弧形轨道外弧面的顶部通过螺栓可拆卸安装在连接块的底面,所述活动块可拆卸安装在弧形电动滑台的弧形滑块上,并跟随弧形滑块在待检测农作物上方作弧形运动,控制芯片与弧形电动滑台通信连接,控制弧形电动滑台的执行动作,使视觉相机至少拍摄到待检测农作物的设定数量的完整叶面。
8、可选的,弧形电动滑台包括弧形轨道、弧形滑块和驱动电机,所述弧形轨道为的形状为弧形段,弧形段的外弧面顶部通过螺栓可拆卸安装在连接块的底面,弧形段的两端设有限位块,弧形滑块位于弧形轨道上移动,所述驱动电机安装在弧形滑块一侧,通过驱动轮驱动弧形滑块沿着弧形轨道移动。
9、通过采用上述技术方案,视觉角度调节机构当然还可以采用一个弧形板下方均布相机的模式实现,但是上述方案只能实现固定角度的拍摄,无法实现范围内的角度随意变化,视觉角度调节机构的设计思路是采用一段弧形的电动滑台来实现,能满足待检测农作物上方一定角度的移动覆盖,从而使视觉相机能拍摄到更加符合虫情分析的角度画面。
10、可选的,虫情视觉分析模块包括数据输入模块、第二视觉分析芯片和存储器,农作物叶面视觉采集单元的视觉相机通过数据输入模块与存储器通信连接,第二视觉分析芯片读取存储器的视觉拍摄数据,基于拍摄数据进行虫情视觉分析,存储在存储器中,存储器与远端服务器通信发送虫情视觉分析结果。
11、通过采用上述技术方案,虫情视觉分析模块主要基于第二视觉分析芯片来实现,数据输入模块可以将视觉相机视觉拍摄数据录入到存储器,第二视觉分析芯片可以调用存储器内的视觉拍摄数据进行虫情分析,存储器内存储了不同害虫特征的害虫特征数据库,第二视觉分析芯片可以基于特征比对结果来进行害虫的识别分析。
12、可选的,农作物叶面视觉采集单元和虫情视觉分析模块均包括无线通信模块,数据输入模块通过无线通信模块与农作物叶面视觉采集单元的视觉相机无线通信连接。
13、通过采用上述技术方案,采用无线通信模块,例如4g/5g无线通信模块,可以减少布线,满足数据传输需求。
14、可选的,虫情视觉分析模块还包括壳体,虫情视觉分析模块的各个电器件均安装在壳体内,壳体设置在待检测农作物的一侧。
15、通过采用上述技术方案,可以将虫情视觉分析模块设置在待检测农作物的一侧,避免安装在农作物叶面视觉采集单元,在不断移动的情况下影响分析结果和使用寿命。
16、基于视觉分析的农作物叶面虫情分析方法,采用基于视觉分析的农作物叶面虫情分析模块对农作物叶面虫情进行分析,具体包括以下步骤:
17、步骤1,按照待检测农作物的数量进行编号,分别记为p1、p2、……、pn,控制芯片基于随机数生成算法,从1到n随机生成一个数字x,控制芯片控制农作物随机选择装置动作,将视觉角度调节机构移动到编号为px的待检测农作物上方;
18、步骤2,控制芯片控制视觉相机从px的正上方进行第一次拍照,记为fa,并传输给第一视觉分析芯片,第一视觉分析芯片基于待检测农作物的叶面特征进行完整叶面识别,设定完整叶面数量阈值s,当识别的完整叶面识别数量y≥s时,则判断fa符合虫情分析需求,将fa发送给虫情视觉分析模块的存储器;
19、步骤3,第二视觉分析芯片调用存储器的fa,先采用视觉特征识别算法对b个完整叶面分别进行框选,并分别记为c1、c2、……、cb,分别对c1、c2、……、cb基于害虫的特征运行视觉识别算法,输出具有害虫种类、数量和个体大小的分析结果,存储在存储器,存储器向远端服务器通信发送虫情视觉分析结果。
20、可选的,步骤2中,完整叶面数量阈值s为10到20的整数。
21、可选的,若步骤2中的正上方进行第一次拍照识别的完整叶面识别数量y<s时,设弧形轨道的总长为l,则控制芯片控制弧形电动滑台的驱动电机动作,每次向左或向右移动十分之一l,每次移动停止后,控制芯片控制视觉相机对px进行一次拍照,并进行完整叶面识别,直到完整叶面识别数量y≥s时,得到的拍摄画面传输给虫情视觉分析模块进行虫情分析。
22、通过采用上述技术方案,具体的在进行虫情分析时,采用以下方法来实现,先读取框选的完整叶面,转化为灰度图像,以便更容易的检测虫子,再使用高斯模糊来减少噪声,实用canny边缘检测来找到虫子的边缘,使用膨胀操作来扩大边缘,使其更容易检测到虫子,重新生成虫子的轮廓特征,并基于轮廓位置原来的色彩进行重新附色,最后得到识别的虫子特征,将虫子特征与害虫特征数据库进行对比,即可得到虫子的种类,对于不同的完整叶面分别执行上述操作即可得到虫子识别结果,并对虫情进行判断,设置基于完整叶面分析下的虫情阈值,例如以10个完整叶面为检测项,若虫子的种类超过2个,数量超过3个,则认为该农作物虫害严重。
23、综上所述,本发明包括以下至少一种有益技术效果:
24、本发明能提供基于视觉分析的农作物叶面虫情分析模块及方法,农作物叶面视觉采集单元的设计思路是需要对待检测农作物上方进行不同角度的拍摄,可以在控制芯片的控制下,通过旋转活动块的位置变化,实现安装在其上的视觉相机对待检测农作物不同角度进行拍摄,第一视觉分析芯片对拍摄的画面进行叶面特征分析,当分析得到的完整叶面数量大于设定的完整叶面数量阈值时,就将拍摄的画面传输给虫情视觉分析模块,虫情视觉分析模块先采用视觉特征识别算法对完整叶面进行框选,并基于框选区域进行虫情视觉分析,虫情分析可以基于设置的害虫特征数据库的比对来进行;
25、通过虫情分析就可以对区域内的多个待检测农作物的虫害情况全面地了解,避免采用诱捕后视觉分析导致的虫情分析结果受诱捕结果影响的缺陷,使虫情分析更加全面准确。
- 还没有人留言评论。精彩留言会获得点赞!