一种汽车悬置系统稳健性优化方法与流程
本技术涉及计算机系统,尤其涉及一种汽车悬置系统稳健性优化方法。
背景技术:
1、汽车悬置系统是车辆动力学中至关重要的组成部分,对行驶舒适性、稳定性以及整车性能有着直接的影响。
2、随着计算机仿真系统技术的发展,对汽车悬置系统的仿真已经成为设计和优化的重要手段。然而,目前的仿真效果存在一些不尽人意的问题,例如对复杂工况的适应性不足,无法准确模拟汽车在实际道路上的振动和冲击,导致汽车悬置系统的性能无法得到有效评估和优化。
3、针对上述问题,目前业界暂未提出较佳的技术解决方案。
技术实现思路
1、本技术提供一种汽车悬置系统稳健性优化方法,用以至少解决现有技术中的仿真系统无法较佳地对汽车悬置系统的性能进行评估和优化的问题问题。
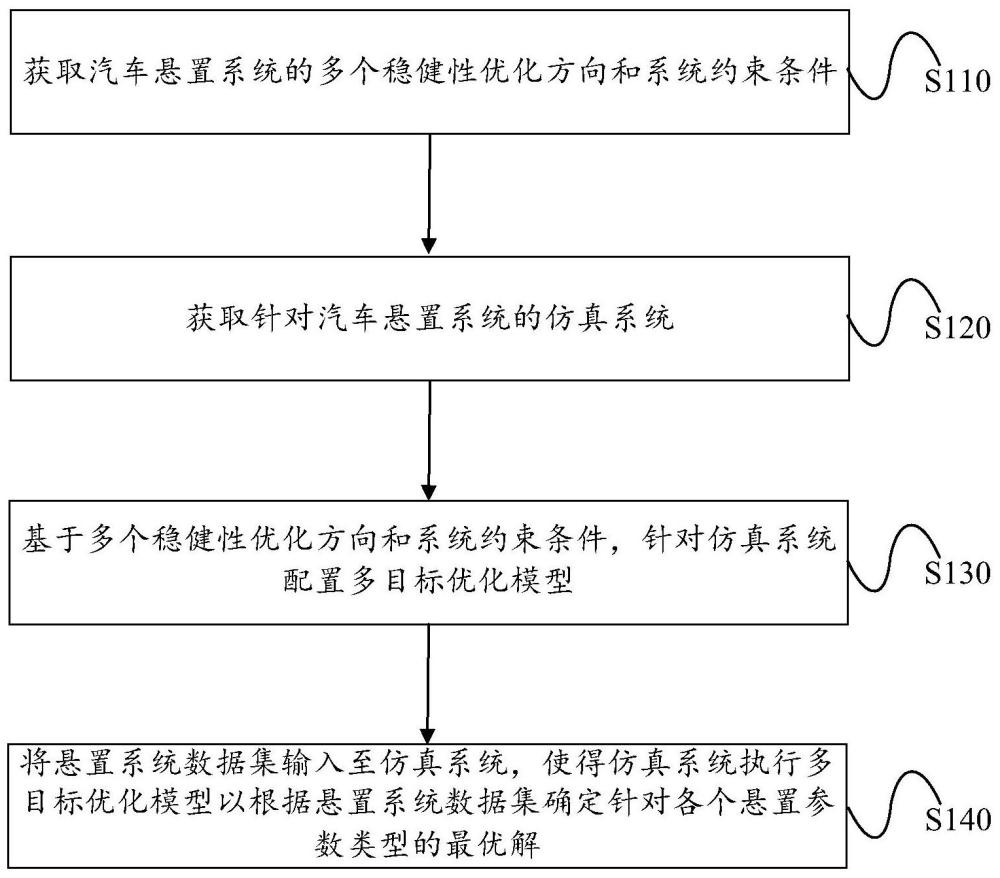
2、本技术提供一种汽车悬置系统稳健性优化方法,包括:获取汽车悬置系统的多个稳健性优化方向和系统约束条件;获取针对所述汽车悬置系统的仿真系统;所述仿真系统定义了所述汽车悬置系统的各个悬置参数类型;基于多个所述稳健性优化方向和所述系统约束条件,针对所述仿真系统配置多目标优化模型;所述多目标优化模型的决策变量是根据各个所述悬置参数类型定义的,所述多目标优化模型的目标函数是根据所述多个稳健性优化方向定义的,以及所述多目标优化模型的优化路径是根据所述系统约束条件定义的;将悬置系统数据集输入至所述仿真系统,使得所述仿真系统执行所述多目标优化模型以根据所述悬置系统数据集确定针对各个所述悬置参数类型的最优解;所述悬置系统数据集中的每一所述悬置系统数据分别源于相应的汽车实况行驶场景,所述悬置系统数据包含多个悬置系统参数,每一所述悬置系统参数分别具有相应的悬置参数类型。
3、可选地,所述稳健性优化方向包含以下中的至少一者:最小化振动幅度、最小化车辆侧倾角和最大化悬置系统的响应频率;所述系统约束条件包含以下中的至少一者:悬置高度不小于预设的最小悬置高度,悬置系统行程不小于预设的最小行程,以及车辆在加速过程中的最大垂直加速度小于预设的加速度阈值。
4、可选地,所述悬置参数类型包括以下中的任意一者:弹簧刚度、阻尼系数、悬置系统高度、防倾杆刚度、悬置系统行程和减振器配置参数。
5、可选地,所述多目标优化模型采用混合多目标优化模型,所述混合多目标优化模型包含级联的粒子群优化模型模块和nsga-ii模型模块。
6、可选地,所述仿真系统执行所述多目标优化模型以根据所述悬置系统数据集确定针对各个所述悬置参数类型的最优解,包括:将所述悬置系统数据集输入至所述粒子群优化模型模块,以根据所述悬置系统数据集中的各个悬置系统参数初始化粒子群位置;基于所述粒子群优化模型模块更新粒子群的位置和速度,求解对应各个所述悬置参数类型的最优粒子组;将所述最优粒子组和所述悬置系统数据集输入至所述nsga-ii模型模块,以根据所述最优粒子组和所述悬置系统数据集初始化种群;基于所述nsga-ii模型模块执行遗传操作处理以更新所述种群,并计算对应各个所述目标函数的帕累托前沿;所述遗传操作处理包含:选择、交叉和变异;根据所述帕累托前沿更新所述最优粒子组中的至少一个粒子,并基于经更新后的最优粒子组确定针对各个所述悬置参数类型的最优解。
7、可选地,通过包括以下方式对粒子速度进行更新:
8、
9、通过包括以下方式对粒子位置进行更新:
10、
11、其中,对于第i个粒子(i=1,2,...,n),在d维搜寻参数空间(d=1,2,...,d);
12、其中,表示第i个粒子在时间t的第d维位置;表示第i个粒子在时间t的第d维速度;pid表示第i个粒子到目前为止遇到的最好位置的第d维坐标,即个体最优;gd表示到目前为止所有粒子遇到的最好位置的第d维坐标,即全局最优;w表示惯性权重,控制粒子的当前速度对其更新速度的影响;c1和c2分别表示个体学习权重和群体学习权重;r1和r2分别是区间[0,1]上的随机数,为每次迭代引入随机性;n表示粒子群的总粒子数量;d表示目标函数的数量。
13、可选地,所述基于所述nsga-ii模型模块执行遗传操作处理以更新所述种群,并计算对应各个所述目标函数的帕累托前沿,包括:针对经更新的种群中的各个个体,为所述个体分配支配等级;针对每一所述支配等级,确定支配等级下的每个个体相对于所述经更新的种群中其他个体的拥挤距离;根据所述支配等级和所述拥挤等级,确定帕累托前沿。
14、可选地,所述拥挤距离通过包括以下的方式而确定:
15、i(i)=(i(i+1)m-i(i-1)m)(fm,max-fm,min),
16、其中,i(i)是第i个个体的拥挤距离,fm表示第m个目标函数,fm,max和fm,min分别是整个种群在该目标函数上的最大值和最小值。
17、可选地,所述仿真系统包括多个物理仿真模型,所述物理仿真模型包含以下中的至少一者:质点模型、弹簧模型、阻尼模型、路面激励模型和多自由度模型。
18、可选地,所述质点模型通过包括以下的方式来确定:
19、
20、其中m表示质点质量,表示质点加速度,c表示悬置的阻尼系数,k表示悬置的弹簧刚度,y表示质点位移,表示质点速度,z表示路面激励的位移,以及表示路面激励的速度;
21、所述多自由度模型通过包括以下的方式来确定:
22、
23、其中,m表示车辆的质量矩阵,表示包含车辆各部分加速度的向量,c表示阻尼矩阵,k表示刚度矩阵,是包含车辆各部分速度的向量,y是包含车辆各部分位移的向量,以及r(t)是车辆各部分受到的路面激励向量;所述车辆各部分位移包含:车体竖直位移、悬挂振动、车轮位移以及车身倾斜。
24、本技术还提供一种汽车悬置系统稳健性优化系统,包括:第一获取单元,用于获取汽车悬置系统的多个稳健性优化方向和系统约束条件;第二获取单元,用于获取针对所述汽车悬置系统的仿真系统;所述仿真系统定义了所述汽车悬置系统的各个悬置参数类型;优化模型配置单元,用于基于多个所述稳健性优化方向和所述系统约束条件,针对所述仿真系统配置多目标优化模型;所述多目标优化模型的决策变量是根据各个所述悬置参数类型定义的,所述多目标优化模型的目标函数是根据所述多个稳健性优化方向定义的,以及所述多目标优化模型的优化路径是根据所述系统约束条件定义的;仿真运行单元,用于将悬置系统数据集输入至所述仿真系统,使得所述仿真系统执行所述多目标优化模型以根据所述悬置系统数据集确定针对各个所述悬置参数类型的最优解;所述悬置系统数据集中的每一所述悬置系统数据分别源于相应的汽车实况行驶场景,所述悬置系统数据包含多个悬置系统参数,每一所述悬置系统参数分别具有相应的悬置参数类型。
25、本技术还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述汽车悬置系统稳健性优化方法。
26、本技术还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述汽车悬置系统稳健性优化方法。
27、本技术还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述汽车悬置系统稳健性优化方法。
28、本技术提供的一种汽车悬置系统稳健性优化方法、系统、电子设备及非暂态计算机可读存储介质,通过综合考虑多个稳健性优化方向和系统约束条件,使得优化模型的优化问题和目标函数更加全面、准确。基于仿真系统的建立和多目标优化模型的配置,有效解决了目前仿真效果不足的问题,特别是在复杂工况下的适应性得到显著提升。然后,通过定义决策变量、目标函数和优化路径,使得优化模型更加精准地反映了汽车悬置系统的实际特性,在实际道路振动和冲击的模拟方面,通过使用悬置系统数据集,确保了仿真系统能够充分考虑各种汽车实况行驶场景,从而更真实地模拟汽车在实际道路上的行驶情况。进而,通过仿真运行多目标优化模型,得到了针对各个悬置参数类型的最优解,为汽车悬置系统的性能评估和优化提供了有力的支持。由此,为汽车制造商和设计师提供了更可靠的优化仿真系统,实现对汽车悬置系统的仿真和稳健性验证及优化,给出针对悬置系统参数的最佳优化方案,使得汽车悬置系统在行驶舒适性、稳定性和整车性能方面取得了明显的改善,提升驾驶员的舒适感和行驶稳定性。
- 还没有人留言评论。精彩留言会获得点赞!