一种相机的漫游飞行方法、装置、电子设备及存储介质与流程
本发明涉及三维场景领域,特别涉及一种相机的漫游飞行方法、装置、电子设备及存储介质。
背景技术:
1、一般的漫游飞行方法会根据当前场景中相机的初始位置和姿态开始位置,以某种方式插值计算相机初始情况下与目标场景之间的相机位置和姿态差别,从而计算随着时间的流逝某时刻对应的场景相机的位置和姿态,以此来模拟三维漫游飞行。但是,在三维漫游中,用户主要是以第一视角观看的,这种插值计算相机位置和姿态差别的方式仅仅着眼于相机自身的位置变化和姿态变化,并没有考虑到目标场景的具体位置情况,会导致在飞行过程中,无法快速的让用户观察到目的地也即目标场景的位置,大部分时间看到的都是无关紧要的内容,不符合人类的主观反应。特别是在转变角度较大时,这种情况会更加加剧,对于用户体验来说非常不太友好。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种相机的漫游飞行方法、装置、电子设备及存储介质,对相机的飞行速度控制更舒服,相机的飞行速度是先加速再减速的方式变化,可减少突然变化导致的眩晕感觉;同时使得相机能快速的把视点也即观察中心点摆向目的地,保证用户更快的观察到目的地,且大部分飞行时间是能看到目的地,从多方面进一步提高了用户体验,有利于整个三维场景的应用推广。其具体方案如下:
2、为解决上述技术问题,本发明提供了一种相机的漫游飞行方法,包括:
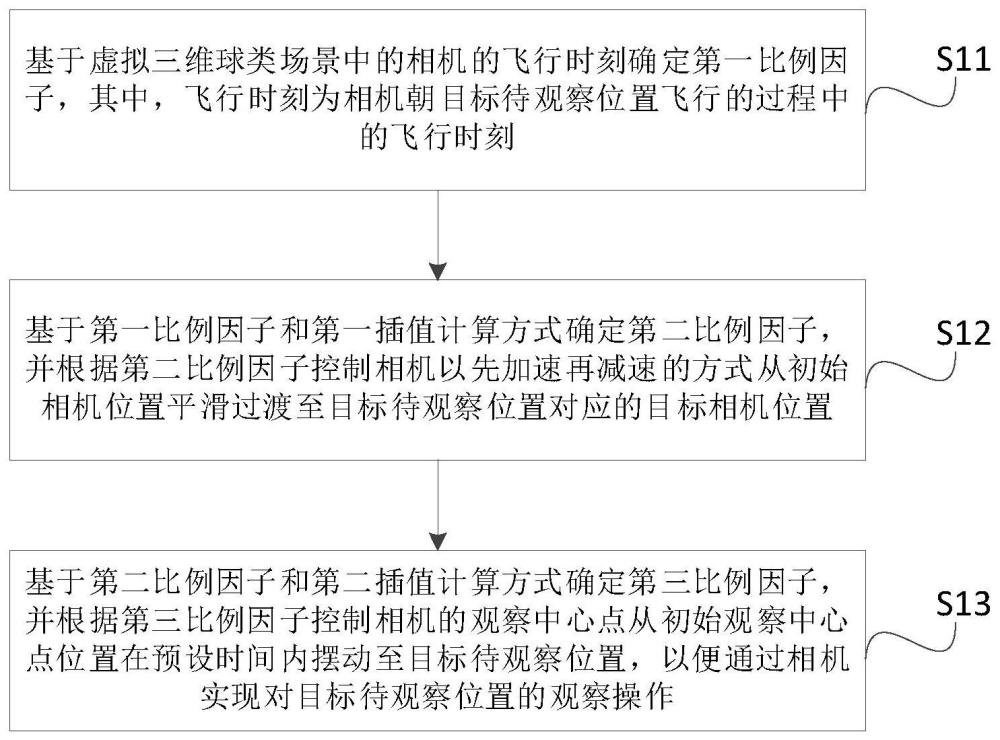
3、基于虚拟三维球类场景中的相机的飞行时刻确定第一比例因子,其中,所述飞行时刻为所述相机朝目标待观察位置飞行的过程中的飞行时刻;
4、基于所述第一比例因子和第一插值计算方式确定第二比例因子,并根据所述第二比例因子控制所述相机以先加速再减速的方式从初始相机位置平滑过渡至所述目标待观察位置对应的目标相机位置;
5、基于所述第二比例因子和第二插值计算方式确定第三比例因子,并根据所述第三比例因子控制所述相机的观察中心点从初始观察中心点位置在预设时间内摆动至所述目标待观察位置,以便通过所述相机实现对所述目标待观察位置的观察操作。
6、可选地,所述基于虚拟三维球类场景中的相机的飞行时刻确定第一比例因子,包括:
7、确定虚拟三维球类场景中的相机的当前飞行时刻和所述相机飞行至所述目标待观察位置对应的目标相机位置所需的整个飞行时间;
8、基于所述相机的当前飞行时刻、所述整个飞行时间和预设关系式计算第一比例因子;
9、所述预设关系式为:
10、
11、其中,st为第一比例因子,t为所述相机的当前飞行时刻,t为所述整个飞行时间。
12、可选地,所述基于所述第一比例因子和第一插值计算方式确定第二比例因子,并根据所述第二比例因子控制所述相机以先加速再减速的方式从初始相机位置平滑过渡至所述目标待观察位置对应的目标相机位置,包括:
13、基于所述第一比例因子和第一贝塞尔曲线计算第二比例因子,其中,所述第一贝塞尔曲线的斜率随所述第一比例因子的增大呈先增大后减小的趋势;
14、根据所述相机的初始相机位置、目标相机位置和所述第二比例因子进行线性插值以确定所述相机的相机位置与所述飞行时刻之间的第一对应关系;
15、基于所述第一对应关系控制所述相机以先加速再减速的方式从初始相机位置平滑过渡至所述目标待观察位置对应的目标相机位置。
16、可选地,所述基于所述第二比例因子和第二插值计算方式确定第三比例因子,并根据所述第三比例因子控制所述相机的观察中心点从初始观察中心点位置在预设时间内摆动至所述目标待观察位置,包括:
17、基于所述第二比例因子和第二贝塞尔曲线计算第三比例因子,其中,所述第二贝塞尔曲线的斜率随所述第二比例因子的增大而增大,且在预设时间内达到预设斜率值;
18、根据所述相机的观察中心点的初始观察中心点位置、所述目标待观察位置和所述第三比例因子进行线性插值以确定所述相机的观察中心点的观察中心点位置与所述飞行时刻之间的第二对应关系;
19、基于所述第二对应关系控制所述相机的观察中心点从初始观察中心点位置在预设时间内摆动至所述目标待观察位置。
20、可选地,所述根据所述第二比例因子控制所述相机以先加速再减速的方式从初始相机位置平滑过渡至所述目标待观察位置对应的目标相机位置之前,还包括:
21、对所述相机的当前相机位置进行抬高处理。
22、可选地,所述对所述相机的当前相机位置进行抬高处理,包括:
23、计算所述相机从初始相机位置飞行至所述目标相机位置所需移动的直线距离;
24、基于所述第一比例因子和第三贝塞尔曲线计算第四比例因子,并基于所述第四比例因子和所述直线距离对所述相机的当前相机位置进行抬高处理。
25、可选地,所述基于所述第四比例因子和所述直线距离对所述相机的当前相机位置进行抬高处理,包括:
26、基于所述第四比例因子和所述直线距离确定视点需要抬高的高度;
27、在与地面方向垂直的方向上将所述需要抬高的高度与所述相机的当前相机位置相加,以对所述相机的当前相机位置进行抬高处理。
28、为解决上述技术问题,本发明还提供了一种相机的漫游飞行装置,包括:
29、第一比例因子确定单元,用于基于虚拟三维球类场景中的相机的飞行时刻确定第一比例因子,其中,所述飞行时刻为所述相机朝目标待观察位置飞行的过程中的飞行时刻;
30、相机位置确定单元,用于基于所述第一比例因子和第一插值计算方式确定第二比例因子,并根据所述第二比例因子控制所述相机以先加速再减速的方式从初始相机位置平滑过渡至所述目标待观察位置对应的目标相机位置;
31、观察中心点位置确定单元,用于基于所述第二比例因子和第二插值计算方式确定第三比例因子,并根据所述第三比例因子控制所述相机的观察中心点从初始观察中心点位置在预设时间内摆动至所述目标待观察位置,以便通过所述相机实现对所述目标待观察位置的观察操作。
32、为解决上述技术问题,本发明还提供了一种电子设备,所述电子设备包括处理器和存储器;其中,所述存储器用于存储计算机程序,所述计算机程序由所述处理器加载并执行以实现如前述所述的相机的漫游飞行方法。
33、为解决上述技术问题,本发明还提供了一种计算机可读存储介质,用于保存计算机程序,所述计算机程序被处理器执行时实现如前述所述的相机的漫游飞行方法。
34、本发明公开了一种相机的漫游飞行方法、装置、电子设备及存储介质,基于插值计算的方式分别控制相机的相机位置和观察中心点位置的平滑过渡过程,根据第二比例因子控制相机以先加速再减速的方式从初始相机位置平滑过渡至目标相机位置,对相机的飞行速度控制更舒服,相机的飞行速度是先加速再减速的方式变化,可减少突然变化导致的眩晕感觉;根据第三比例因子控制相机的观察中心点位置在预设时间内摆动至目标待观察位置,使得相机能快速的把视点也即观察中心点摆向目的地,保证用户更快的观察到目的地,且大部分飞行时间是能看到目的地,从多方面进一步提高了用户体验,有利于整个三维场景的应用推广。
- 还没有人留言评论。精彩留言会获得点赞!