基于扩展卡尔曼粒子滤波的电网动态状态估计方法与系统
本发明属于电网状态估计领域,特别涉及一种基于扩展卡尔曼粒子滤波的电网动态状态估计方法与系统。
背景技术:
1、状态估计是为电网各项业务提供可靠、准确、完整的系统运行状态的重要工具,其主要分为静态状态估计和动态状态估计两大类。静态状态估计仅考虑某一时刻的量测数据,并根据描述量测与状态关系的量测方程来估计该时刻的系统状态。动态状态估计不仅考虑了量测数据和量测方程,还考虑了系统的动态特性,即系统状态转移方程,从而估计出系统状态。随着间歇的、随机的和电力电子接口的非同步可再生发电和分布式能源在电网占比的增加,电网运行状态的变化更加频繁和更加迅速,动态状态估计将在未来电网的监测、控制和保护中发挥重要作用。
2、动态状态估计的常用方法包括扩展卡尔曼滤波,无迹卡尔曼滤波和粒子滤波等。扩展卡尔曼滤波将非线性函数在估计点附近进行泰勒级数展开,保留一次项,当电网运行在强非线性区间时,其近似线性化估计效果并不好;无迹卡尔曼滤波涉及矩阵求根,当矩阵不为正定对称矩阵时,无法对矩阵求根,从而无法输出状态估计结果,使其无法应用于实际电网动态状态估计;粒子滤波基于蒙特卡洛采样,在状态估计过程中采样出大量粒子用于表征状态量概率,但该方法普遍存在严重的样本权值退化问题,即粒子退化问题,导致其运用受限。
3、《基于扩展卡尔曼滤波状态估计值的在线优化设计方法》提到了基于扩展卡尔曼滤波状态估计方法,该方法将非线性函数在估计点附近进行泰勒级数展开,保留一次项,当系统运行在强非线性区间时,其近似线性化估计效果并不好,导致最终的状态估计效果较差(cn110119588a)。
技术实现思路
1、本发明的主要目的在于为解决扩展卡尔曼滤波线性化方法带来误差和粒子滤波普通存在的粒子退化问题,提供一种基于扩展卡尔曼粒子滤波的电网动态状态估计方法。
2、本发明的目的至少通过以下技术方案之一实现。
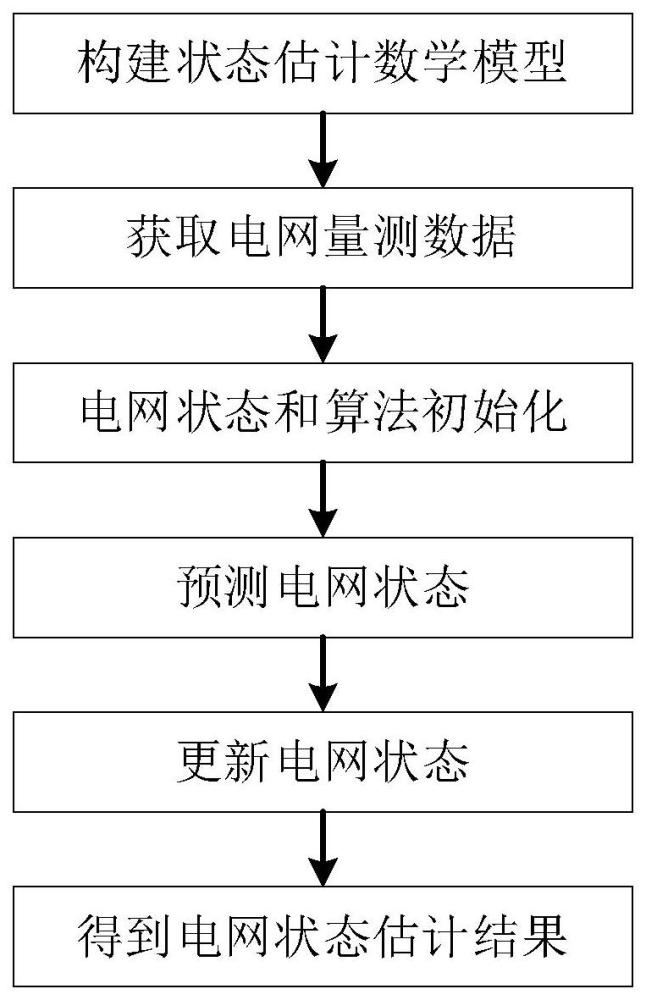
3、基于扩展卡尔曼粒子滤波的电网动态状态估计方法,包括以下步骤:
4、s1、根据电网量测数据和状态数据构建电网动态状态估计的数学模型;
5、s2、获取时刻1到时刻t的电网的量测数据z1:t,并获取电网的网络拓扑和模型参数;
6、s3、对电网状态和扩展卡尔曼粒子滤波算法进行初始化,令时标k=1;
7、s4、利用扩展卡尔曼粒子滤波算法对电网状态进行预测和更新;
8、s5、判断时标k是否小于时刻t,若是,则令k=k+1并返回步骤s4,否则进行s6;
9、s6、根据步骤s4-s5的迭代计算得到电网动态状态估计结果。
10、进一步地,步骤s1中,电网动态状态估计的数学模型由两组方程组成,第一组方程描述了状态量与量测量之间的关系,即电网量测方程g,第二组方程描述了当前时刻的状态量与上一时刻的状态量之间的关系,即电网状态转移方程f,具体如下:
11、sk=f(sk-1)+ωk
12、zk=g(sk)+vk
13、其中,f为描述此时刻电网状态量与上一时刻电网状态量关系的函数;g为描述电网状态量与电网量测量关系的函数;sk为k时刻的电网状态向量;zk为k时刻的电网量测向量;ωk为k时刻的电网转移误差向量;vk为k时刻的电网量测误差向量;
14、所述电网状态转移函数f、电网状态向量sk和电网转移误差向量ωk是d维的向量,d为大于1的整数;
15、所述电网量测函数g、电网量测向量zk和电网量测误差向量vk是m维的向量,m为大于1的整数。
16、进一步地,所述电网量测方程g包括:
17、节点电压相量幅值的量测量与节点电压相量幅值的状态量之间的关系,即
18、
19、其中,为电网中节点i电压相量幅值的量测量,ui为电网中节点i电压相量幅值的状态量;
20、节点电压相量与节点有功功率、无功功率的关系,即
21、
22、
23、其中,ui为节点i的电压幅值,δi是节点i的相角,δj是节点i的相角,δij=δi-δj为节点i与节点j的相角差,pi和qi分别为节点i的有功功率和无功功率,流入节点的有功功率为正,流出节点的有功功率为负;gij和bij分别为节点导纳矩阵第i行第j列元素的实部和虚部;n为电网节点的数量;
24、节点电压相量与线路有功功率、无功功率的关系,即
25、
26、其中,j为虚数单位,为节点i的电压相量;为的共轭;为节点i的线路对地导纳的共轭;为节点i和节点j之间线路导纳的共轭;pij和qij分别为连接节点i与节点j的线路的始端有功功率和无功功率,由节点i流向节点j为正方向。
27、g(sk)是状态估计中量测方程的抽象集合,上述公式是电网状态估计中具体的量测方程。
28、进一步地,所述电网状态转移方程f具体如下:
29、
30、
31、bk=β(ak-ak-1)+(1-β)bk-1
32、其中,为k时刻第l个电网状态量的预测值,为k-1时刻第l个电网状态量的估计值,ak为k时刻平滑后的状态,bk为k时刻平滑后的趋势,α和β为平滑参数,所述平滑参数α和β是大于0小于1的实数。
33、f(sk-1)是状态估计中状态转移方程的抽象集合,上述公式是电网状态估计中具体的状态转移方程。
34、进一步地,步骤s3中,所述对系统状态和扩展卡尔曼粒子滤波算法进行初始化,包括:
35、根据电网初始状态设置初始时刻的电网状态s0的概率密度函数是均值为s’0,协方差为g0的高斯分布;
36、根据电网初始状态设置初始时刻的电网转移误差的概率密度函数是均值为0,协方差为q0的高斯分布;
37、根据电网初始状态设置初始时刻的电网量测误差的概率密度函数是均值为0,协方差为r0的高斯分布;
38、根据精度要求设置扩展卡尔曼粒子滤波算法的粒子数为ns,一般情况下,精度要求越高,ns越大。
39、进一步地,步骤s4中,所述利用扩展卡尔曼粒子滤波算法对电网状态进行预测,包括:
40、(1)给定k-1时刻电网的粒子集为其中,表示k-1时刻第r个粒子的权值,ns为扩展卡尔曼粒子滤波算法的粒子数;
41、(2)令粒子序号r为1;
42、(3)根据k-1时刻第r个粒子的估计值计算k时刻第r个粒子的预测值公式为:
43、
44、(4)根据k时刻第r个粒子的预测值k-1时刻第r个粒子的状态协方差和k时刻的电网转移误差qk得到k时刻第r个粒子的状态协方差的预测值公式为
45、
46、其中,是函数f在处的雅可比矩阵;
47、(5)根据k时刻第r个粒子的状态协方差的预测值和k时刻电网量测误差的协方差rk计算k时刻第r个粒子的卡尔曼增益kr k,公式为
48、
49、其中,是函数g在处的雅可比矩阵。
50、(6)根据k时刻第r个粒子的卡尔曼增益kr k和k时刻的量测量zk计算k时刻第r个粒子的估计值sr k,公式为
51、
52、(7)根据k时刻第r个粒子的卡尔曼增益kr k和k时刻第r个粒子的预测值计算k时刻第r个粒子的协方差矩阵gr k,公式为
53、
54、(8)令r=r+1,判断r是否大于ns,若大于则进行步骤(9),否则返回步骤(3);
55、(9)得到k时刻电网的粒子集为
56、进一步地,步骤s4中,所述利用扩展卡尔曼粒子滤波算法对电网状态进行更新,包括:
57、(1)根据k时刻第r个粒子的估计值sr k和k时刻的量测量zk计算k时刻第r个粒子的未归一化权值公式为
58、
59、其中,pv是量测误差的概率密度函数。
60、(2)计算k时刻第r个粒子的归一化权值,公式为
61、
62、(3)得到k时刻权值更新后的电网粒子集为{sr k,wr k},r=1,…,ns。
63、基于扩展卡尔曼粒子滤波的电网动态状态估计系统,所述系统包括:
64、模型建立模块:根据电网量测数据和状态数据构建电网动态状态估计的数学模型;
65、数据获取模块:获取一段时间内的电网的量测数据和电网的网络拓扑及模型参数;
66、算法初始化模块:对电网状态和扩展卡尔曼粒子滤波算法进行初始化;
67、状态估计模块:利用扩展卡尔曼粒子滤波算法对电网状态进行预测和更新步骤,最终得到电网动态状态估计结果。
68、一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现权利要求1至10任一项所述基于扩展卡尔曼粒子滤波的电网动态状态估计方法。
69、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现权利要求1至10任一项所述基于扩展卡尔曼粒子滤波的电网动态状态估计方法。
70、本发明与现有技术相比,具有如下优点和有益效果:
71、本发明针对扩展卡尔曼滤波线性化方法带来误差和粒子滤波普通存在的粒子退化问题,提出了一种基于扩展卡尔曼粒子滤波的电网动态状态估计方法。首先,根据电网量测数据和状态数据构建电网动态状态估计的数学模型;其次,获取一段时间内的电网的量测数据,并获取电网的网络拓扑及模型参数;然后,对电网状态和扩展卡尔曼粒子滤波算法进行初始化;最后,利用扩展卡尔曼粒子滤波算法对电网状态进行预测和更新步骤,最终得到电网动态状态估计结果,实现了适用于电网的高精度动态状态估计。
- 还没有人留言评论。精彩留言会获得点赞!