一种基于改进Yolov5网络的水稻穴播排种性能检测方法
本发明属于机器视觉和目标识别,具体涉及一种基于改进yolov5网络的水稻穴播排种性能检测方法。
背景技术:
1、随着农业技术的不断发展,精准获取水稻穴播排种性能对农业生产的管理和决策具有重要意义。然而,传统的人工统计方法存在效率低、劳动强度大、主观性高、统计误差大等问题。近年来,基于计算机视觉的图像识别技术得到了广泛应用,但在小目标的识别技术及穴播排种性能自动统计等方面仍存在一定的挑战。针对这个问题,现有文件"a deeplearning-based method for rice seed counting"提出了一种基于深度学习方法的自动化计数水稻种子的方法。该方法利用卷积神经网络(cnn)对水稻种子图像进行训练和识别,实现了高精度的种子计数。然而,这种方法目前还无法应用于连续穴播排种工况下包含穴径、穴距等穴播排种性能的检测与统计。
技术实现思路
1、本发明的目的是针对现有自动化种子数检测方法无法应用于连续穴播排种工况下穴播性能的检测与统计的问题,提供了一种基于改进yolov5网络的水稻穴播排种性能检测方法。
2、本发明是通过以下技术方案实现的:一种基于改进yolov5网络的水稻穴播排种性能检测方法,包括以下步骤:
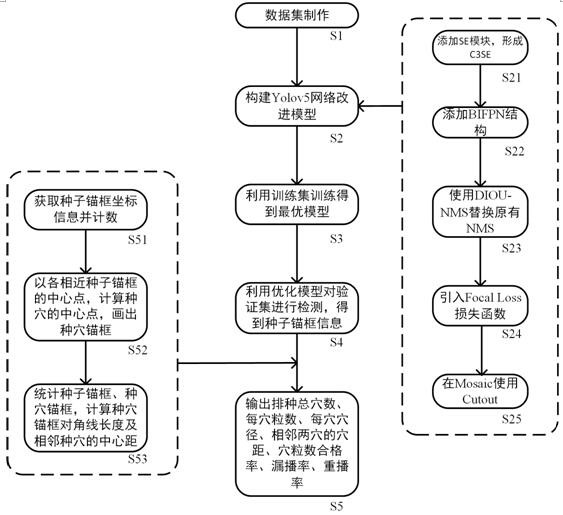
3、s1:数据集制作,采集穴播排种过程中的视频图像,对视频图像预处理后得到预处理图像,采用labelimg工具对预处理图像中的检测目标进行分类、标注,得到数据集;
4、所述检测目标为种子及成穴种子形成的种穴;
5、所述数据集里包括3%的背景图片以提高模型泛化能力,所述数据集按照数量8:2的比例划分为训练集、验证集;
6、s2:基于yolov5网络基础模型,构造添加se模块、bifpn结构,使用diou-nms替换原模型中nms,引入focal loss损失函数,在mosaic上使用cutout,得到yolov5网络改进模型;
7、s3:利用训练集对yolov5网络改进模型进行训练迭代,得到最优模型;
8、s4:利用优化模型对验证集进行目标检测,得到检测结果;所述检测结果包括种子锚框和种穴锚框及其位置信息;
9、s5:对s4中检测结果进行计算,输出排种性能参数;
10、所述排种性能参数包括总穴数、每穴粒数、每穴穴径以及相邻两穴之间的穴距。
11、为了丰富数据集,模拟真实场景,消除干扰因素,平衡类别分布,所述视频图像包括室内采集和室外采集,所述视频图像包括室内采集和室外采集,室外采集方法为,利用高速摄像机对水稻穴播排种过程的穴播效果进行视频录制,具体包括平行太阳光运动拍摄、垂直太阳光运动拍摄以及阴天拍摄;
12、所述室内采集方法为,通过传送带模拟田间排种的过程,在不同速度和光线下进行拍摄。
13、采集不同环境下的照片可以用于训练目标检测模型,使得模型能够在不同环境下识别目标物体。例如,在室内和室外环境下,目标物体的光照、背景、角度等都可能有所不同,如果模型只在某一种环境下训练,就可能无法准确识别其他环境下的目标物体。因此,采集不同环境下的照片可以提高模型的鲁棒性和泛化能力,使得模型在实际应用中更加可靠和有效。
14、具体的,所述s1中标注的内容包括种子及种穴边界框的坐标和种子类别标签信息,针对标注的内容生成对应的txt文件。
15、具体的,预处理图像为满足yolov5网络基础模型输入要求的图像,预处理过程包括图像的缩放、裁剪、归一化等操作,以满足yolov5网络基础模型的输入要求;yolov5网络基础模型接受的输入是一张图像,通常是以张量的形式表示。
16、具体的,所述diou的公式如下:
17、
18、其中,b,bgt分别代表预测框与真实框的中心点,ρ代表两个中心点间的欧氏距离,c代表能够同时包含预测框和真实框的最小闭包区域的对角线距离;
19、应用于diou-nms,增设中心点距离d,公式如下:
20、d=ρ2(b,bgt)
21、
22、其中,m表示最高置信度的框,bi为遍历各个框跟置信度高的重合情况,si是分类置信度,ε为nms阈值。
23、具体的,所述focal loss损失函数包含二分类交叉熵公式:
24、
25、focal loss损失函数的公式为:
26、fl(pt)=-αt(1-pt)γlog(pt)
27、loss=-(1-p)γlogp,(γ=1)
28、loss=-pγlog(1-p),(γ=0)
29、式中,p是y=1时的估计概率,αt为权重因子,(1-pt)γ为调节因子,γ为可调节聚焦参数;当γ很小时,调节因子趋近于1,focal loss损失函数中样本的权重不受影响;
30、当γ很大时,调节因子趋近于0,focal loss损失函数中样本的权重也不受影响。
31、具体的,s5中计算方法包括以下内容:
32、s51:对每粒种子进行锚框标记得到种子锚框,获取种子锚框的坐标、种子类别标签、排序和计数;
33、s52:根据相近的各种子锚框的中心点坐标确定种穴中心点,以种穴中心点为几何中心,画出包含多个相近种子锚框的矩形框为种穴锚框,并使种穴锚框的各边分别接近对应位置种子锚框的外侧边;
34、s53:统计种穴锚框的数量作为总穴数,每个种穴锚框内种子锚框的数量作为该种穴的穴粒数,设置种穴锚框对角线的边长作为种穴的穴径,两个相邻种穴中心点之间的距离作为穴距。
35、具体的,所述种穴中心点的计算方式为,假设有n粒种子其中心点坐标为(x1,y1),(x2,y2),...,(xn,yn);
36、种穴中心点x坐标公式为:center_x=σ(xi)*(1/n);
37、种穴中心点y坐标公式为:center_y=σ(yi)*(1/n)。
38、为了方便统计漏播率和重播率,需要测定漏播次数和重播次数,预设单个种穴内的种子数n在n1-n2范围内时为合格,预设穴距l为l时为合格;
39、当n<n1时为漏播穴,设第一漏播次数为a1;当n>n2时为重播穴,设第一重播次数为b1;
40、当l≤0.5l时,设第二重播次数为b2,检测区段的频数记为n1';
41、当l>1.5l时,设第二漏播次数为a2;当1.5l<l≤2.5l时,记一次漏播,检测区段的频数记为n2';当2.5l<l≤3.5l时,记两次漏播,检测区段的频数记为n3';当3.5l<l≤4.5l时,记三次漏播,检测区段的频数记为n4';当l>4.5l时,系统停止检测,提示故障;
42、漏播次数a=a1+a2;
43、a2=n2'+2n3'+3n4';
44、重播次数b=b1+b2;
45、b2=n1'。
46、se模块通过学习建模特征通道之间的相互依赖关系,通过学习的方式获得每个channel的重要程度,然后依照这个重要程度来对各个通道上的特征进行加权,从而突出重要特征,抑制不重要特征。
47、本质上,se模块是在channel维度上做attention和gating操作,这种注意力机制让模型可以更加关注channel特征;将通道注意力、上下文注意力和空间注意力的权重相乘,得到最终的加权特征图作为c3se模块的输出;通过在通道、上下文和空间三个维度上对特征进行加权调整,c3se模块能够提高目标检测任务中的特征表达能力,从而提高准确性和召回率。
48、与现有技术相比,本发明具有以下有益效果:
49、(1)在mosaic数据增强上使用cutout,通过缩放、随机剪裁等操作,丰富了水稻穴播排种的背景和目标形态,一定程度上增加了检测速度与精度,提高了模型泛化能力,实现了水稻穴播排种穴粒数与种穴的高效识别与计数;
50、(2)对于检测尺度过大的问题,通过增加se注意力机制,增加感受野,通过自适应网络增强特征表述能力,并减少计算量,提升对小目标的检测精度;
51、(3)添加bifpn结构,可以构建在不同的特征金字塔层级之间的信息传递融合,更好的捕捉特征,提高目标检测的准确性,提高了小目标的ap值;
52、(4)通过引入focal loss损失函数,从梯度角度出发,根据加权理论,对高质量锚框进行充分优化;
53、(5)通过在yolov5改进模型中引入种子锚框和种穴锚框的定义,以便根据种子的种植农艺要求和实际聚集状态确定种总穴数、每穴粒数、合格率、每穴穴径以及相邻两穴的穴距、漏播率、重播率、平均穴距合格率等数据,实现对连续穴播排种工况下各穴播性能的准确检测与自动统计。
- 还没有人留言评论。精彩留言会获得点赞!