空间目标监视星上自主规划方法、电子设备及存储介质与流程
本发明涉及天基空间目标监视,尤其涉及一种空间目标监视星上自主规划方法、电子设备及存储介质。
背景技术:
1、空间目标监视是对空间目标进行探测跟踪、定轨预报、识别编目、侦收分析的情报获取系统,其目的是确定可能对航天系统构成威胁的航天器尺寸、形状、轨道参数等重要目标特性,进而对目标特性数据进行归类和分发。空间目标监视的首端主要分为地基空间目标监视和天基空间目标监视两种。
2、近年来,随着星链等低轨互联网星座的发射,在轨卫星、火箭残骸、空间碎片等空间目标的数目迅速增加,对空间目标的监视和数据管理对于卫星的在轨安全至关重要。天基空间目标监视是空间目标监视领域的重要发展方向,与地基空间目标监视相比,具有探测频次高、不受气象条件影响的优势。随着空间目标数量的增加,合理安排空间目标监视卫星的观测计划,降低地面中心的任务管控压力,需要解决空间目标监视卫星星上任务规划的问题。
技术实现思路
1、为解决上述现有技术中存在的技术问题,本发明的目的在于提供一种的空间目标监视星上自主规划方法、电子设备及存储介质,具有算法简单、确定性强、容易在星上计算机应用的特点,有利于缓解空间目标监视卫星地面运控的压力,充分发挥卫星的自主任务能力。
2、为实现上述发明目的,本发明提供一种空间目标监视星上自主规划方法,包括以下步骤:
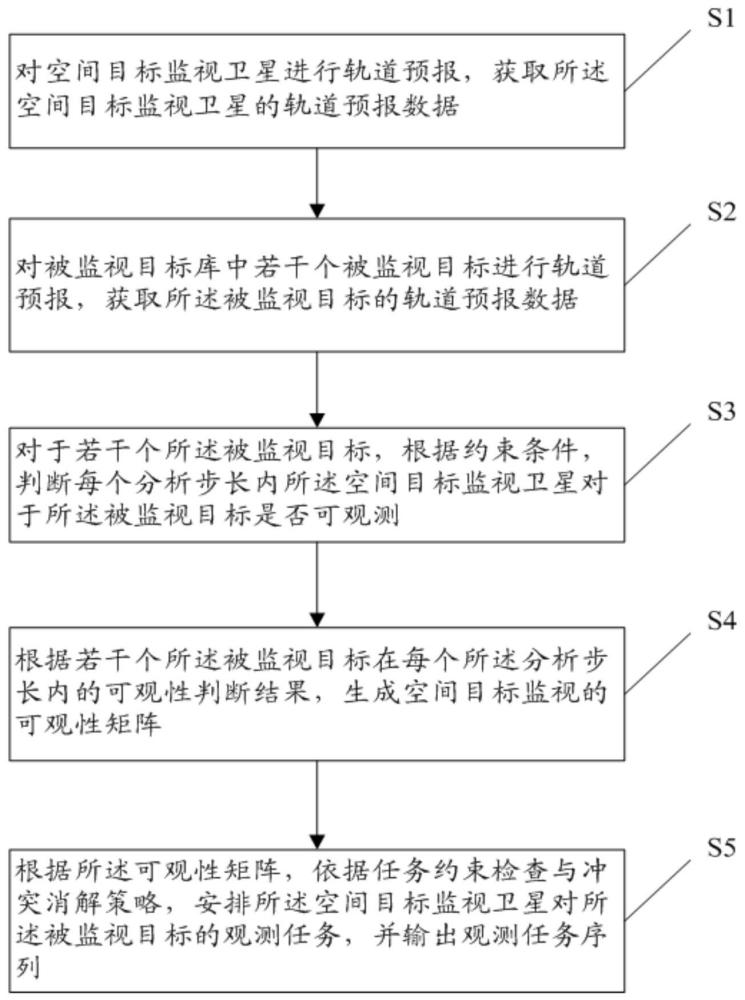
3、步骤s1、对空间目标监视卫星进行轨道预报,获取所述空间目标监视卫星的轨道预报数据;
4、步骤s2、对被监视目标库中若干个被监视目标进行轨道预报,获取所述被监视目标的轨道预报数据;
5、步骤s3、对于若干个所述被监视目标,根据约束条件,判断每个分析步长内所述空间目标监视卫星对于所述被监视目标是否可观测;
6、步骤s4、根据若干个所述被监视目标在每个所述分析步长内的可观性判断结果,生成空间目标监视的可观性矩阵;
7、步骤s5、根据所述可观性矩阵,依据任务约束检查与冲突消解策略,安排所述空间目标监视卫星对所述被监视目标的观测任务,并输出观测任务序列。
8、根据本发明的一个技术方案,在所述步骤s1中,具体包括:
9、步骤s11、确定所述空间目标监视卫星的初始化轨道参数,所述空间目标监视卫星的初始化轨道参数包括所述空间目标监视卫星的轨道纪元时刻t0、惯性坐标系位置rs0、惯性坐标系速度vs0;
10、步骤s12、确定本次任务中所述空间目标监视卫星的持续时间△t和分析计算的时间步长δt;
11、步骤s13、选择解析法的轨道预报器;
12、步骤s14、计算所述空间目标监视卫星在分析步长i的历元时刻ti、惯性系位置rsi、惯性系速度vsi;其中,i=1,2...q,q为分析步长的总个数。
13、根据本发明的一个技术方案,在所述步骤s2中,具体包括:
14、步骤s21、从所述被监视目标库里面选择一个被监视目标j,j=1,2,...p,p为所述被监视目标库中被监视目标的总数;取出所述被监视目标j的轨道参数,所述被监视目标j的轨道参数包括轨道纪元时刻t0j、轨道半长轴aj、偏心率eccj、轨道倾角inclj、升交点赤经ωj、近地点幅角ωj、真近点角θj;
15、步骤s22、设置所述被监视目标的持续时间和分析步长与所述空间目标监视卫星的持续时间△t和分析计算的时间步长δt相同,并选择解析法的轨道预报器;
16、步骤s23、计算所述被监视目标j在所述分析步长i的历元时刻tij、惯性系位置rtij、惯性系速度vtij;其中,i=1,2...q,q为分析步长的总个数;
17、步骤s24、循环执行步骤s21至步骤s23,直至完成所有p个被监视目标的轨道预报。
18、根据本发明的一个技术方案,在所述步骤s3中,具体包括:
19、步骤s31、根据行星星历和历元时刻计算所述分析步长i内的太阳入射光线矢量rsuni和月球方向矢量rluni;
20、步骤s32、根据所述空间目标监视卫星的轨道预报数据和所述被监视目标j的轨道预报数据,计算观测矢量robsij,robsij=rtij-rsi;
21、步骤s33、根据关系式(1)判断所述空间目标监视卫星对所述被监视目标j是否满足观测顺光约束:
22、
23、其中,表示两个矢量之间的夹角;
24、如果所述观测顺光约束不满足,则直接进入步骤s37;
25、步骤s34、根据关系式(2)判断所述空间目标监视卫星对所述被监视目标j是否满足月球规避约束:
26、
27、如果所述月球规避约束不满足,则直接进入步骤s37;
28、步骤s35、根据所述空间目标监视卫星的惯性系位置rs0和所述被监视目标j的惯性系位置rsi,计算所述空间目标监视卫星对所述被监视目标j的观测方位角φij和俯仰角并根据关系式(3)判断所述空间目标监视卫星对所述被监视目标j是否满足平台转角约束条件:
29、
30、如果所述平台转角约束不满足,则直接进入步骤s37;
31、步骤s35、根据所述空间目标监视卫星的惯性系位置rs0和所述被监视目标j的惯性系位置rsi,计算所述空间目标监视卫星对所述被监视目标j的观测方位角φij和俯仰角并根据关系式(4)判断所述空间目标监视卫星对所述被监视目标j是否满足平台转角约束条件:
32、
33、如果所述平台转角约束不满足,则直接进入步骤s37;
34、步骤s36、根据所述空间目标监视卫星的惯性坐标系速度vs0和所述被监视目标j的惯性系速度vsi,计算所述空间目标监视卫星对所述被监视目标j的持续观测方位角速度和俯仰角速度并根据关系式(5)判断所述空间目标监视卫星对所述被监视目标j方位角速度和俯仰角速度是否满足平台转动角速度束条件:
35、
36、如果所述平台转动角速度约束不满足,则直接进入步骤s37;
37、步骤s37、步骤s33至s36四个约束条件全满足,表示所述分析步长i内所述空间目标监视卫星对所述被监视目标j可观测,并对于所述被监视目标j赋值mij=1;否则,所述分析步长i内所述空间目标监视卫星对所述被监视目标j不可观测,并对于所述被监视目标j赋值mij=0。
38、根据本发明的一个技术方案,在所述步骤s4中,具体包括:
39、根据若干个所述被监视目标的在每个所述分析步长内可观性的判断结果,以所述被监视目标的编号j为行号,以分析步长的编号i为列号,形成空间目标监视的可观性矩阵mp×q,其中,p为被监视目标数目,q为计算总步数,mij即为所述可观性矩阵中第j行第i列的元素。
40、根据本发明的一个技术方案,在所述步骤s5中,具体包括:
41、步骤s51、对所述可观性矩阵mp×q的各列的元素的数值累加,得到一个单行的一维数组l1×q,所述一维数组l1×q中各元素数值均为介于0~q之间的整数;
42、步骤s52、找到所述一维数组l1×q中除0以外的最小值,根据所述最小值所在的列号,在所述可观性矩阵mp×q内找到对应的行号,从而确定本次观测任务目标;当所述最小值所在的列号对应的多个行号时,根据任务列表中的观测任务记录,选择观测次数最少的被监视目标进行观测;
43、步骤s53、根据确定的所述本次观测任务目标及所述一维数组l1×q中最小值所在的列在所述可观性矩阵mp×q中的对应位置,找到所述本次观测任务目标所在行中连续的若干个值为1的列,作为所述本次观测任务目标的观测持续步长,记为[m1,m2),所述本次观测任务目标的观测持续步长的长度等于空间目标观测的最小持续步长;根据所述本次观测任务目标及其观测持续步长生成观测任务并进行观测,观测任务编号记为
44、步骤s54、计算任务编号所需的观察方位角和俯仰角并检查在步长[m1,m2)附近的观测任务pij与观测任务pm1n之间的切换时间是否满足约束;如果切换时间满足约束,则安排第[m1,m2)个步长对第n个目标进行观测,将观测任务pm1n输出到空间目标监视卫星的任务列表p中;否则,删除观测任务pm1n。
45、根据本发明的一个技术方案,在所述步骤s5中,还包括:
46、s55、对所述可观性矩阵mp×q进行降维处理:安排完观测任务pm1n或删除观测任务pm1n后,将所述可观性矩阵mp×q的第n行的所有数值置为0。
47、根据本发明的一个技术方案,在所述步骤s5中,还包括:
48、重复执行步骤s51至步骤s55,直至完成对p个所述被监视目标的观测任务安排,且所述可观性矩阵mp×q为全零矩阵,输出观测任务到任务列表p中。
49、根据本发明的一个方面,提供了一种电子设备,包括:一个或多个处理器、一个或多个存储器、以及一个或多个计算机程序;其中,处理器与存储器连接,上述一个或多个计算机程序被存储在存储器中,当电子设备运行时,该处理器执行该存储器存储的一个或多个计算机程序,以使电子设备执行如上述技术方案中任一项所述的一种空间目标监视星上自主规划方法。
50、根据本发明的一个方面,提供了一种计算机可读存储介质,用于存储计算机指令,所述计算机指令被处理器执行时,实现如上述技术方案中任一项所述一种空间目标监视星上自主规划方法。
51、本发明与现有技术相比,具有如下有益效果:
52、本发明提出了一种空间目标监视星上自主规划方法、电子设备及存储介质,通过对空间目标监视卫星和被监视目标进行解析轨道预报,并根据轨道预报数据和约束条件判断每个分析步长内空间监视卫星对于被监视目标是否可观测,并根据判断结果生成可观性矩阵,根据可观性矩阵、依据任务约束检查与冲突消解策略安排空间目标监视卫星对被监视目标的观测任务并输出观测任务序列,实现空间目标监视任务的自主规划。本发明采用采用的规划算法全部解析,且采用的冲突消解与优化策略简单、确定性强,能在星载计算机实现,降低了空间目标监视卫星地面运控的压力,提升了卫星的自主性。
53、本发明,通过对可观性序列进行各列的累加处理获得一维数据,并通过在一维数据中查找最小值的方式锁定观测目标及其对应步长,生成观测任务,降低了生成观测任务时系统的数据处理量,提高了空间目标监规划系效率。
- 还没有人留言评论。精彩留言会获得点赞!