横坡车位坐标的确定方法、装置、计算机设备及存储介质与流程
本发明涉及计算机,具体涉及横坡车位坐标的确定方法、装置、计算机设备及存储介质。
背景技术:
1、车位检测可以为无人驾驶提供路标信息,辅助无人驾驶车辆定位、构建语义地图。另一方面,在自动泊车功能的寻库以及泊车阶段,车位检测的稳定性将直接关系到自动泊车的成功率。稳定可靠的车位检测是无人驾驶中的重要任务之一,尤其是在泊车方案中,车位是最主要的语义特征之一,也是泊车最终的目标点。
2、现有车位检测方式主要是基于地面是水平的假设进行,对于有一定坡度的车位,这种检测方式造成的误差较大,不利于顺利泊车。
技术实现思路
1、有鉴于此,本发明提供了一种横坡车位坐标的确定方法、装置、计算机设备及存储介质,以解决横坡车位坐标确定不准确的问题。
2、第一方面,本发明提供了一种横坡车位坐标的确定方法,包括:
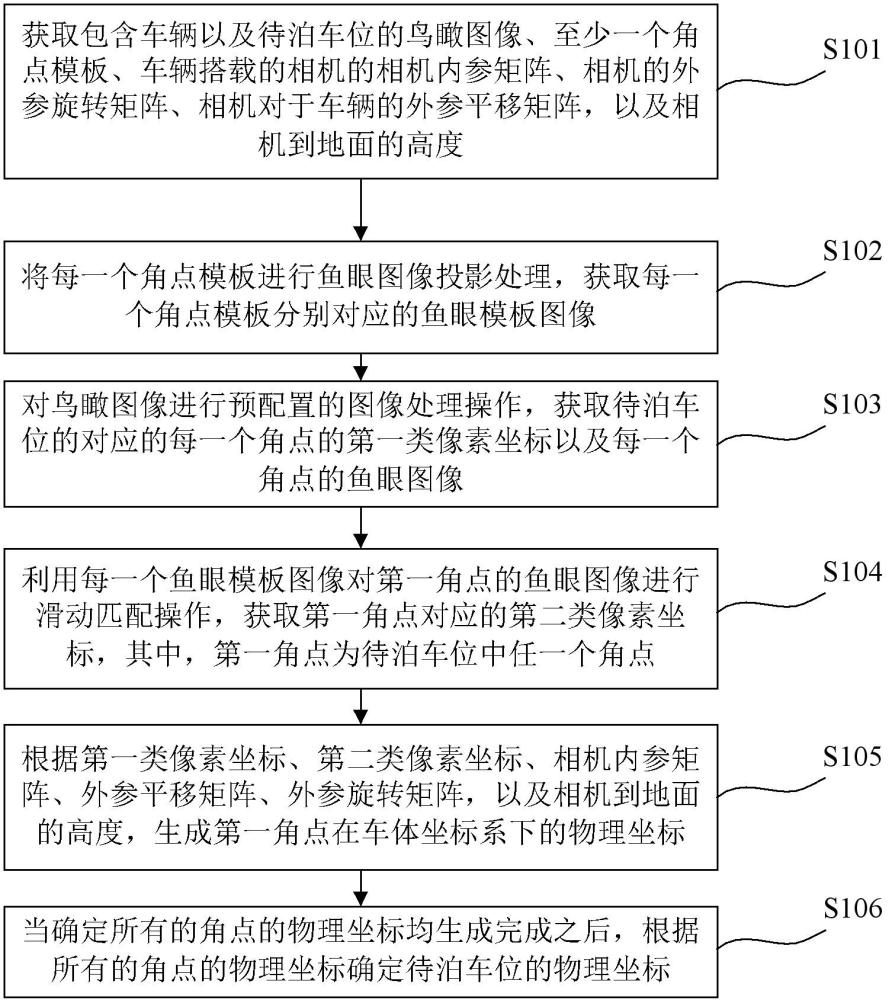
3、获取包含车辆以及待泊车位的鸟瞰图像、至少一个角点模板、车辆搭载的相机的相机内参矩阵、相机的外参旋转矩阵、相机对于车辆的外参平移矩阵,以及相机到地面的高度;
4、将每一个角点模板进行鱼眼图像投影处理,获取每一个角点模板分别对应的鱼眼模板图像;
5、对鸟瞰图像进行预配置的图像处理操作,获取待泊车位对应的每一个角点的第一类像素坐标以及每一个角点的鱼眼图像;
6、利用每一个鱼眼模板图像对第一角点的鱼眼图像进行滑动匹配操作,获取第一角点对应的第二类像素坐标,其中,第一角点为待泊车位中任一个角点;
7、根据第一类像素坐标、第二类像素坐标、相机内参矩阵、外参平移矩阵、外参旋转矩阵,以及相机到地面的高度,生成第一角点在车体坐标系下的物理坐标;
8、当确定所有的角点的物理坐标均生成完成之后,根据所有的角点的物理坐标确定待泊车位的物理坐标。
9、通过上述方式,获取包含车辆以及待泊车位的鸟瞰图像、至少一个角点模板、车辆搭载的相机的相机内参矩阵、相机的外参旋转矩阵、相机对于车辆的外参平移矩阵,以及相机到地面的高度;将每一个角点模板进行鱼眼图像投影处理,获取每一个角点模板分别对应的鱼眼模板图像;对鸟瞰图像进行预配置的图像处理操作,获取待泊车位对应的每一个角点的第一类像素坐标以及每一个角点的鱼眼图像;利用每一个鱼眼模板图像对第一角点的鱼眼图像进行滑动匹配操作,获取第一角点对应的第二类像素坐标;根据第一类像素坐标、第二类像素坐标、相机内参矩阵、外参平移矩阵、外参旋转矩阵,以及相机到地面的高度,生成第一角点在车体坐标系下的物理坐标;当确定所有的角点的物理坐标均生成完成之后,根据所有的角点的物理坐标确定待泊车位的物理坐标。可以先利用车位检测算法获取检测得到的车位坐标,基于该坐标,利用模板匹配的方式,得到车位实际角点的像素位置,再根据车载相机的内参矩阵、外参旋转矩阵等参数,确定车辆相对于车体坐标系的物理坐标,这样得到的车位坐标,即使车位不位于水平面,是有一定的坡度,也可以准确的确定车位每一个角点的坐标,有利于泊车的顺利进行。
10、在一种可选的实施方式中,对鸟瞰图像进行预配置的图像处理操作,获取待泊车位对应的每一个角点的第一类像素坐标以及每一个角点的鱼眼图像第一类像素坐标,包括:
11、对鸟瞰图像进行车位检测处理,获取待泊车位的每一个角点以及每一个角点分别对应的第一类像素坐标;
12、分别从鸟瞰图像中提取出包含每一个角点的预设大小的图像块;
13、对每一个角点对应的图像块分别进行鱼眼图像投影处理,生成该角点对应的鱼眼图像。
14、在一种可选的实施方式中,利用每一个鱼眼模板图像对第一角点的鱼眼图像进行滑动匹配操作,获取第一角点对应的第二类像素坐标,包括:
15、利用第一鱼眼模板图像对第一角点的鱼眼图像进行滑动匹配操作,获取每一次滑动匹配时第一鱼眼模板图像的位置坐标和第一鱼眼模板图像中每一个像素点的梯度,其中,第一鱼眼模板图像为鱼眼图像模板中任一个鱼眼图像模板;
16、根据第一鱼眼模板图像中每一个像素点的梯度和预获取的第一角点的鱼眼图像中每一个像素点的梯度,确定第一鱼眼模板图像与第一角点的代价值;
17、将数值最小的代价值作为第一鱼眼模板图像的目标代价值;
18、直至确定获取到所有模板的目标代价值之后,将所有的目标代价值中数值最小的目标代价值对应的模板作为第一角点对应的目标模板;
19、将目标模板的位置坐标作为第一角点的鱼眼像素坐标;
20、将鱼眼像素坐标进行坐标转换,得到第一角点对应的第二类像素坐标。
21、通过该方式,利用多个角点模板进行角点匹配,将在滑动时与角点最接近的位置,作为角点的实际位置,可以较为准确的找到角点的实际位置,为后续进行坐标转换提供较为准确的数据基础。
22、在一种可选的实施方式中,根据第一类像素坐标、第二类像素坐标、相机内参矩阵、外参平移矩阵、外参旋转矩阵,以及相机到地面的高度,生成第一角点在车体坐标系下的物理坐标,包括:
23、根据第一类像素坐标、第二类像素坐标、相机内参矩阵、以及相机到地面的高度,生成第一角点对应的高度;
24、根据第二类像素坐标、以及相机内参矩阵,确定第一角点对应的第一方向向量;
25、根据第一角点对应的高度、第一方向向量、相机到地面的高度、外参平移矩阵,以及外参旋转矩阵,生成第一角点在车体坐标系下的物理坐标。
26、在一种可选的实施方式中,根据第二类像素坐标、第一类像素坐标、相机内参矩阵、以及相机到地面的高度,生成第一角点对应的高度,包括:
27、根据第一类像素坐标、相机内参矩阵确定第一角点对应的第二方向向量;
28、将第一方向向量与水平方向的夹角作为第一夹角;
29、将第二方向向量与水平方向的夹角作为第二夹角;
30、根据第一夹角、第二夹角以及相机到地面的高度,确定第一角点对应的高度。
31、在一种可选的实施方式中,根据第一角点对应的高度、第一方向向量、相机到地面的高度、外参旋转矩阵、外参平移矩阵,生成第一角点在车体坐标系下的物理坐标,包括:
32、根据第一角点对应的高度、外参旋转矩阵、第一方向向量以及相机到地面的高度,确定第一角点到相机的距离;
33、根据第一角点到相机的距离、外参旋转矩阵、第一方向向量以及相机到地面的高度以及外参平移矩阵,生成第一角点在车体坐标系下的物理坐标。
34、在一种可选的实施方式中,第一角点的物理坐标为三维坐标,根据第一角点到相机的距离、外参旋转矩阵、第一方向向量以及相机到地面的高度以及外参平移矩阵,生成第一角点在车体坐标系下的物理坐标之后,方法还包括:
35、根据物理坐标的横向坐标和物理坐标的纵向坐标,确定第一角点至车辆的车辆中心点的距离;
36、根据车辆中心点的距离和物理坐标的竖向坐标,确定待泊车位所在横坡的坡度。
37、第二方面,本发明提供了一种横坡车位坐标的确定装置,包括:
38、获取模块,用于获取包含车辆以及待泊车位的鸟瞰图像、至少一个角点模板、车辆搭载的相机的相机内参矩阵、相机的外参旋转矩阵、相机对于车辆的外参平移矩阵,以及相机到地面的高度;
39、鱼眼图像投影处理模块,用于将每一个角点模板进行鱼眼图像投影处理,获取每一个角点模板分别对应的鱼眼模板图像;
40、图像处理模块,用于对鸟瞰图像进行预配置的图像处理操作,获取待泊车位对应的每一个角点的第一类像素坐标以及每一个角点的鱼眼图像;
41、滑动匹配模块,用于利用每一个鱼眼模板图像对第一角点的鱼眼图像进行滑动匹配操作,获取第一角点对应的第二类像素坐标,其中,第一角点为待泊车位中任一个角点;
42、生成模块,用于根据第一类像素坐标、第二类像素坐标、相机内参矩阵、外参平移矩阵、外参旋转矩阵,以及相机到地面的高度,生成第一角点在车体坐标系下的物理坐标;
43、确定模块,用于当确定所有的角点的物理坐标均生成完成之后,根据所有的角点的物理坐标确定待泊车位的物理坐标。
44、第三方面,本发明提供了一种计算机设备,包括:存储器和处理器,存储器和处理器之间互相通信连接,存储器中存储有计算机指令,处理器通过执行计算机指令,从而执行上述第一方面或其对应的任一实施方式的横坡车位坐标的确定方法。
45、第四方面,本发明提供了一种计算机可读存储介质,该计算机可读存储介质上存储有计算机指令,计算机指令用于使计算机执行上述第一方面或其对应的任一实施方式的横坡车位坐标的确定方法。
- 还没有人留言评论。精彩留言会获得点赞!