一种后期合成软件的全景相机模拟方法及相关设备与流程
本发明涉及全景模拟,具体而言,涉及一种后期合成软件的全景相机模拟方法及相关设备。
背景技术:
1、在计算机的虚拟环境下想要模拟出全景效果,以往的方式一般是通过三维软件制作三维环境,然后利用三维软件本身自带的球形模拟相机(即720°球形相机)获得全景图像。
2、而如今,随着after effects软件(一种后期合成软件)的更新换代,其功能越发强大,after effects软件的最新版本目前也已经能够有效运用三维效果,然而由于aftereffects软件目前还没有自带能够直接使用的全景模拟相机,因此想要通过after effects软件获得全景图像依然需要借助其他工具并配合相应的模拟方法才能实现,然而部分模拟方法尽管能够模拟出全景效果,但模拟过程往往十分复杂,且只能在指定位置观看才能得到最佳的全景视觉效果,在离开指定位置后,全景视觉就会发生扭曲变形,导致其局限性较大。
3、针对上述问题,目前尚未有有效的技术解决方案。
技术实现思路
1、本发明的目的在于提供一种后期合成软件的全景相机模拟方法及相关设备,能够利用after effects软件模拟出720°球形相机,由此更简单高效地模拟出局限性较小的全景效果。
2、第一方面,本发明提供了一种后期合成软件的全景相机模拟方法,适用于aftereffects软件,包括以下步骤:
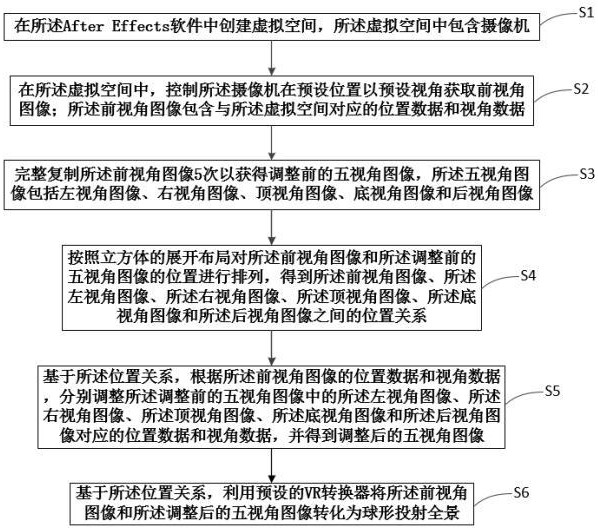
3、s1.在所述after effects软件中创建虚拟空间,所述虚拟空间中包含摄像机;
4、s2.在所述虚拟空间中,控制所述摄像机在预设位置以预设视角获取前视角图像;所述前视角图像包含与所述虚拟空间对应的位置数据和视角数据;
5、s3.完整复制所述前视角图像5次以获得调整前的五视角图像,所述五视角图像包括左视角图像、右视角图像、顶视角图像、底视角图像和后视角图像;
6、s4.按照立方体的展开布局对所述前视角图像和所述调整前的五视角图像的位置进行排列,得到所述前视角图像、所述左视角图像、所述右视角图像、所述顶视角图像、所述底视角图像和所述后视角图像之间的位置关系;
7、s5.基于所述位置关系,根据所述前视角图像的位置数据和视角数据,分别调整所述调整前的五视角图像中的所述左视角图像、所述右视角图像、所述顶视角图像、所述底视角图像和所述后视角图像对应的位置数据和视角数据,并得到调整后的五视角图像;
8、s6.基于所述位置关系,利用预设的vr转换器将所述前视角图像和所述调整后的五视角图像转化为球形投射全景。
9、本发明的后期合成软件的全景相机模拟方法,不依赖于三维软件和其他辅助工具,仅通过after effects软件便能够模拟出相当于三维软件自带的720°球形相机,以此实现全景效果的模拟。
10、进一步的,步骤s1中的具体步骤包括:
11、s11.新建一个正方形的第一项目窗口;
12、s12.在所述第一项目窗口中创建一个包含所述摄像机的所述虚拟空间;
13、步骤s2中的具体步骤包括:
14、s21.新建一个正方形的第二项目窗口;
15、s22.将所述第二项目窗口链接到所述第一项目窗口中,以使所述第二项目窗口能够调用所述摄像机;
16、s23.将所述摄像机调整至所述预设位置和所述预设视角后,从所述第二项目窗口通过所述摄像机获取画面,并将所述第二项目窗口所呈现的画面作为所述前视角图像。
17、复制多个第二项目窗口实现720°的视角布局,以此实现720°的全景效果,同时用户通过第一项目窗口也能够轻易变换虚拟空间,从而实现不同场景的全景模拟。
18、进一步的,所述位置数据包括摄像机位置和摄像机目标点;所述视角数据包括摄像机方向和摄像机旋转角度。
19、进一步的,步骤s5中的具体步骤包括:
20、s51.基于所述位置关系,根据所述前视角图像的位置数据和视角数据,分别调整所述调整前的五视角图像中的所述左视角图像、所述右视角图像、所述顶视角图像、所述底视角图像和所述后视角图像对应的位置数据以及对应的摄像机旋转角度,得到所述调整后的五视角图像;
21、s52.利用预设的位置表达式锁定所述前视角图像的位置数据以及所述调整后的五视角图像中的所述左视角图像、所述右视角图像、所述顶视角图像、所述底视角图像和所述后视角图像对应的位置数据,并将所述调整后的五视角图像中的所述左视角图像、所述右视角图像、所述顶视角图像、所述底视角图像和所述后视角图像对应的摄像机位置通过所述第二项目窗口链接到所述前视角图像对应的摄像机上;
22、s53.利用预设的目标点表达式将所述调整后的五视角图像中的所述左视角图像、所述右视角图像、所述顶视角图像、所述底视角图像和所述后视角图像对应的摄像机目标点通过所述第二项目窗口链接到所述前视角图像对应的摄像机上;
23、s54.利用预设的方向表达式将所述调整后的五视角图像中的所述左视角图像、所述右视角图像、所述顶视角图像、所述底视角图像和所述后视角图像对应的摄像机方向通过所述第二项目窗口链接到所述前视角图像对应的摄像机上。
24、通过形成约束和关联,确保以前视角图像对应的摄像机为基准,有利于避免用户在虚拟空间中移动时全景视觉出现扭曲变形的情况。
25、进一步的,步骤s4中的具体步骤包括:
26、s41.将所述左视角图像放置在所述前视角图像的左侧;
27、s42.将所述右视角图像放置在所述前视角图像的右侧;
28、s43.将所述后视角图像放置在所述右视角图像的右侧;
29、s44.将所述顶视角图像放置在所述前视角图像的上侧;
30、s45.将所述底视角图像放置在所述前视角图像的下侧。
31、在此位置布局下便于拼接成立方体,从而有利于缩短vr转换器将其转化为球形投射全景的处理时间,以此提高全景模拟的效率。
32、第二方面,本发明提供了一种后期合成软件的全景相机模拟装置,适用于aftereffects软件,包括:
33、创建模块,用于在所述after effects软件中创建虚拟空间,所述虚拟空间中包含摄像机;
34、控制模块,用于在所述虚拟空间中,控制所述摄像机在预设位置以预设视角获取前视角图像;所述前视角图像包含与所述虚拟空间对应的位置数据和视角数据;
35、复制模块,用于完整复制所述前视角图像5次以获得调整前的五视角图像,所述五视角图像包括左视角图像、右视角图像、顶视角图像、底视角图像和后视角图像;
36、位置布局模块,用于按照立方体的展开布局对所述前视角图像和所述调整前的五视角图像的位置进行排列,得到所述前视角图像、所述左视角图像、所述右视角图像、所述顶视角图像、所述底视角图像和所述后视角图像之间的位置关系;
37、调整模块,用于基于所述位置关系,根据所述前视角图像的位置数据和视角数据,分别调整所述调整前的五视角图像中的所述左视角图像、所述右视角图像、所述顶视角图像、所述底视角图像和所述后视角图像对应的位置数据和视角数据,并得到调整后的五视角图像;
38、转化模块,用于基于所述位置关系,利用预设的vr转换器将所述前视角图像和所述调整后的五视角图像转化为球形投射全景。
39、本发明提供的后期合成软件的全景相机模拟装置仅通过after effects软件就能够模拟出720°球形相机,以此通过简单、高效且局限性较低的方式模拟出全景效果。
40、进一步的,所述创建模块用于在所述after effects软件中创建虚拟空间的时候执行:
41、s11.新建一个正方形的第一项目窗口;
42、s12.在所述第一项目窗口中创建一个包含所述摄像机的所述虚拟空间;
43、所述控制模块用于在所述虚拟空间中,控制所述摄像机在预设位置以预设视角获取前视角图像的时候执行:
44、s21.新建一个正方形的第二项目窗口;
45、s22.将所述第二项目窗口链接到所述第一项目窗口中,以使所述第二项目窗口能够调用所述摄像机;
46、s23.将所述摄像机调整至所述预设位置和所述预设视角后,从所述第二项目窗口通过所述摄像机获取画面,并将所述第二项目窗口所呈现的画面作为所述前视角图像。
47、进一步的,所述位置数据包括摄像机位置和摄像机目标点;所述视角数据包括摄像机方向和摄像机旋转角度;
48、所述调整模块在用于基于所述位置关系,根据所述前视角图像的位置数据和视角数据,分别调整所述调整前的五视角图像中的所述左视角图像、所述右视角图像、所述顶视角图像、所述底视角图像和所述后视角图像对应的位置数据和视角数据,并得到调整后的五视角图像的时候执行:
49、s51.基于所述位置关系,根据所述前视角图像的位置数据和视角数据,分别调整所述调整前的五视角图像中的所述左视角图像、所述右视角图像、所述顶视角图像、所述底视角图像和所述后视角图像对应的位置数据以及对应的摄像机旋转角度,得到所述调整后的五视角图像;
50、s52.利用预设的位置表达式锁定所述前视角图像的位置数据以及所述调整后的五视角图像中的所述左视角图像、所述右视角图像、所述顶视角图像、所述底视角图像和所述后视角图像对应的位置数据,并将所述调整后的五视角图像中的所述左视角图像、所述右视角图像、所述顶视角图像、所述底视角图像和所述后视角图像对应的摄像机位置通过所述第二项目窗口链接到所述前视角图像对应的摄像机上;
51、s53.利用预设的目标点表达式将所述调整后的五视角图像中的所述左视角图像、所述右视角图像、所述顶视角图像、所述底视角图像和所述后视角图像对应的摄像机目标点通过所述第二项目窗口链接到所述前视角图像对应的摄像机上;
52、s54.利用预设的方向表达式将所述调整后的五视角图像中的所述左视角图像、所述右视角图像、所述顶视角图像、所述底视角图像和所述后视角图像对应的摄像机方向通过所述第二项目窗口链接到所述前视角图像对应的摄像机上。
53、第三方面,本发明提供一种电子设备,包括处理器以及存储器,所述存储器存储有计算机可读取指令,当所述计算机可读取指令由所述处理器执行时,运行如上述第一方面提供的所述后期合成软件的全景相机模拟方法中的步骤。
54、第四方面,本发明提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时运行如上述第一方面提供的所述后期合成软件的全景相机模拟方法中的步骤。
55、由上可知,本发明提供的后期合成软件的全景相机模拟方法,在after effects软件上模拟出相当于三维软件自带的720°球形相机,以此准确模拟出较真实的全景效果,同时还能够确保不仅限于固定位置才能获得最佳的全景视觉效果,并且整个模拟过程只需利用after effects软件而无需借助其他工具,大大降低了模拟过程的复杂程度,有利于实现更高效的全景模拟。
56、本发明的其他特征和优点将在随后的说明书阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明实施例了解。本发明的目的和其他优点可通过在所写的说明书、以及附图中所特别指出的结构来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!