一种基于蒙特卡洛法的落水集装箱轨迹预测方法
本发明涉及人工智能,具体而言,尤其涉及一种基于蒙特卡洛法的落水集装箱轨迹预测方法。
背景技术:
1、海上集装箱运输已经成为一种集装化、高效化、大型化的现代运输方式。集装箱落水后通常会出现随风、流漂移或进水沉底的状态。这不仅会影响海上航行的安全,还会对海洋生态环境造成严重污染。
2、为提高打捞效率,保障港口航道的通航安全,各大港航企业和救助打捞单位已将集装箱装载安全问题置于核心位置。同时研发新型落海集装箱追踪和打捞技术。
技术实现思路
1、根据上述提出的落水集装箱不仅会影响海上航行的安全,还会对海洋生态环境造成严重污染的技术问题,提供一种基于蒙特卡洛法的落水集装箱轨迹预测方法。本发明分析了影响落水集装箱漂移的因素,将集装箱的漂移运动抽象成随机粒子风致漂移和流致漂移的叠加,建立集装箱漂移模型。引入蒙特卡洛方法优化模型参数,提高预测准确度。为了使集装箱漂移过程更加贴合真实环境,使数据更加可靠,为风流漂移计算公式分别添加一个扰动,来模拟现实中不断变换的风流速度。从而更加直观地显示集装箱流失后随时间变化的漂移轨迹,以及最佳搜寻区域。最后,通过仿真实验来验证引入蒙特卡洛方法后的漂移模型对落水集装箱轨迹预测的有效性。
2、本发明采用的技术手段如下:
3、一种基于蒙特卡洛法的落水集装箱轨迹预测方法,包括:
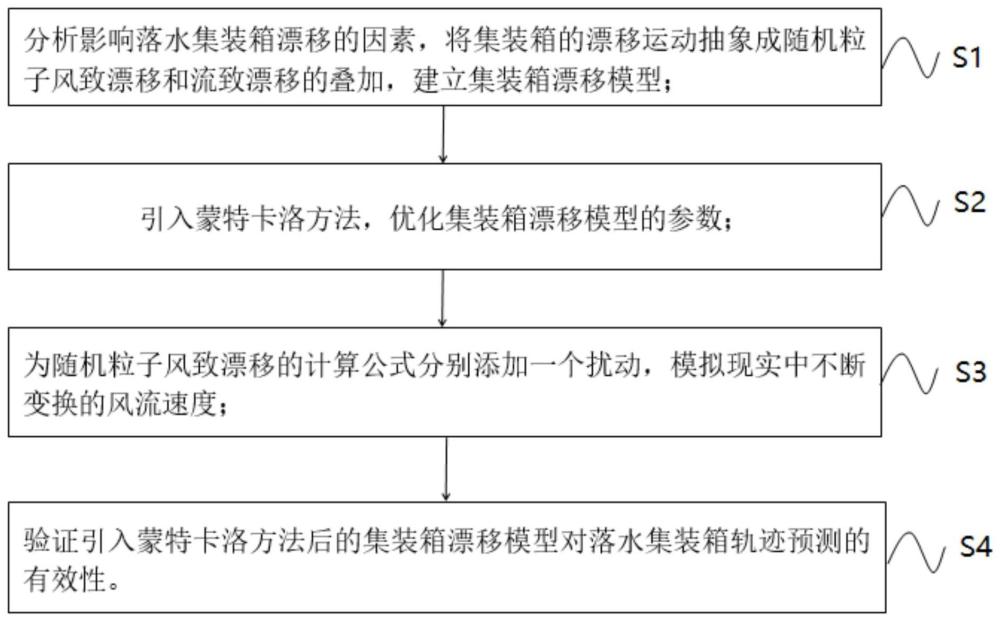
4、s1、分析影响落水集装箱漂移的因素,将集装箱的漂移运动抽象成随机粒子风致漂移和流致漂移的叠加,建立集装箱漂移模型;
5、s2、引入蒙特卡洛方法,优化集装箱漂移模型的参数;
6、s3、为随机粒子风致漂移的计算公式分别添加一个扰动,模拟现实中不断变换的风流速度;
7、s4、验证引入蒙特卡洛方法后的集装箱漂移模型对落水集装箱轨迹预测的有效性。
8、进一步地,所述步骤s1中,影响落水集装箱漂移的因素包括:海洋环境因素和集装箱自身的因素,具体为:
9、海洋环境因素包括:风压作用、总海流、波浪、科氏力;
10、集装箱自身的因素包括:由于落水集装箱的种类、尺寸、质量以及集装箱结构的不同,导致集装箱的浸没比不同,最终导致落水集装箱漂移的路径以及最终最佳搜寻区域不同,当不考虑流动和科氏力的作用时,浸没比例与漂移速度之间存在关联:
11、
12、
13、
14、上式中,ρa、ρw分别为空气和海水的密度,vwind为海面上气体流速,v表示集装箱漂移速度,r为水和空气密度的比值。
15、进一步地,所述步骤s1中,通过确定漂流轨迹与各因素之间的关系,建立集装箱漂移模型,具体包括:
16、计算自由物体在海面上的漂移速度,计算公式如下:
17、
18、当落水集装箱漂移时,落水集装箱的运动轨迹会受到风、流、浪因素的影响,对落水集装箱进行受力分析,如下:
19、
20、上式中,m表示集装箱质量,表示集装箱漂移速度在水平方向的分量,f表示科氏力系数,表示垂直方向的单位矢量,表示总风压力,表示流的拖拽力,表示波浪辐射力;
21、计算总风压力、流的拖拽力及波浪辐射力,计算公式如下:
22、
23、
24、fwave=1/2ciwgρwlta
25、上式中,ciw、ca、cw分别表示波浪、风和流的拖拽系数,lt表示集装箱的长度尺度,a表示海浪的波幅。
26、进一步地,所述步骤s2,包括优化集装箱漂移模型的初始位置误差和风流扰动,具体包括:
27、s21、优化初始位置误差:
28、将参考基准点设为坐标系原点,参考基准点误差服从参数σ1、σ2为方差的二维正态分布;在这个坐标系中,参考基准点是(0,0),假设x=(x1,x2)代表目标的真实位置,则x1和x2分别服从以均值为0,方差为σ的正态分布,并且x1和x2是独立的,因此,目标位置分布的概率密度函数符合下列公式:
29、
30、当σ1、σ2相等时,则服从圆形分布:
31、
32、使用mvnrnd函数获取满足圆形正态分布的随机样本;
33、在原点(0,0)为集装箱落水初始位置,随机产生1000个粒子,则样本容量为1000,以正东方向为x轴正方向,北方向为y轴正方向,以随机生成粒子的期望为圆心,方差为σ2,半径为3σ,筛选出服从圆形分布的随机向量抽样;
34、s22、优化风流扰动:
35、假设风扰动的方向与平均风速的方向相同,而且大小服从期望为平均风速的正态分布,将海平面以上10米处的风速表示为:
36、wi=||w10+ξi||
37、上式中,wi表示颗粒i在海面以上10m处的估计风速,w10表示海面10m处的预测风速,ξi表示粒子i在海面以上10m处的风速扰动,ξi服从正态分布,数学期望为0,方差为σ2wind,记为ξi∈n(0,σ2wind);
38、考虑到海流扰动的复杂性,假设流扰动服从圆形均匀分布,将海平面下0.5米处的流速表示为:
39、
40、上式中,表示水深0.5米处流速的预测值,c0.5表示水深0.5米处流速的预报值,ξi'表示为海平面以下0.5m处,粒子i的当前速度扰动,ξi'服从均匀正态分布,数学期望为0,方差为σ2current,记为ξi'~n(0,σ2current)。
41、进一步地,所述步骤s3,具体包括:
42、s31、单个粒子随时间变化的运动状态可用下列公式表示:
43、dx=v(x,t)dt+dε
44、dε=k1/2dω,k=σ2t
45、上式中,x表示马尔可夫变量,v(x,t)表示粒子漂移过程中t时刻的速度,dε表示更符合漂移过程的不确定性的实际情况而添加的随机扰动,dε服从具有已知均值和方差的正态分布,dω表示随机增量,k表示扰动扩散系数,σ2表示扰动速度的方差,t表示扰动时间
46、s32、将叠加了风致漂移和流致漂移之后的漂移模型简化为下列公式:
47、
48、上式中,pi(t)表示粒子t时刻的漂移位置;pi(0)表示粒子i的初始位置;vcurrent(t)表示海流感应漂移速度;l(t)表示风致漂移速度;εi为第i个粒子的风、流扰动,εi服从正态分布,数学期望为0,方差为σl2,记为εi~n(0,σl2);
49、s33、根据步骤s31和步骤s32,得到:
50、l(t)=(α+ε/10)wi
51、上式中,ε表示添加的扰动,服从正态分布,数学期望为0,方差为σε2,记为ε∈n(0,σε2);
52、s34、采用无约束线性回归风压漂移模型得出40ft标准尺寸集装箱风致漂移的经验公式:
53、ld=1.8vwind+1.4+εd。
54、进一步地,所述步骤s4,具体包括:
55、s41、采用粒子的拉格朗日追踪方法描述集装箱在漂移过程中的运动状态;将漂浮的集装箱抽象成相互独立的粒子,并为每个粒子赋予漂移物体的所有属性;在进行漂移计算时,考虑海面风、流以及波浪力的联合作用,假设不同粒子之间的运动是互不相关的;
56、s42、根据步骤s3中模拟现实中不断变换的风流速度,采用matlab模拟集装箱漂移运动;
57、s43、统计每个小方格内粒子的数量,用数量的多少表示集装箱最终漂移位置在小方格内概率的大小,形成目标位置的概率图,将包含粒子数目集中的小方格区域用圆覆盖,即为模拟的最佳搜寻区域;
58、s44、在实际的漂移物体航迹推算中,每个粒子代表一个漂移物体的位置随着风、流、波浪外部环境的作用不断运动,粒子群持续扩散,搜寻区域会不断扩大;在经过漂移时间t后,得出模型最终的分布特征,取置信水平高于99%的区间作为最后的搜寻概率区域,绘制出网格并优化搜寻方案。
59、较现有技术相比,本发明具有以下优点:
60、1、本发明提供的基于蒙特卡洛法的落水集装箱轨迹预测方法,在分析影响落水集装箱漂移的因素的基础上,将集装箱的漂移运动抽象成随机粒子风致漂移和流致漂移的叠加,建立集装箱漂移模型。引入蒙特卡洛方法优化模型参数,提高了预测准确度。
61、2、本发明提供的基于蒙特卡洛法的落水集装箱轨迹预测方法,为了使集装箱漂移过程更加贴合真实环境,使数据更加可靠,为风流漂移计算公式分别添加一个扰动,来模拟现实中不断变换的风流速度,从而更加直观地显示集装箱流失后随时间变化的漂移轨迹,以及最佳搜寻区域。
62、基于上述理由本发明可在人工智能等领域广泛推广。
- 还没有人留言评论。精彩留言会获得点赞!