机器人的健康指数确定方法、装置及电子设备与流程
本发明涉及机器人领域,具体而言,涉及一种机器人的健康指数确定方法、装置及电子设备。
背景技术:
1、协作机器人是一类能够在共享空间中与人类交互或在人类附近安全工作的新型工业机器人,由于其轻质、安全的特点,在柔性制造、社会服务、医疗健康等多个领域展现出了良好的应用前景,受到工业界和学术界的广泛关注,成为当前机器人领域的研究热点之一。随着协作机器人在各行各业渗透其优越的性能表现,大幅地提高了企业的生产或作业效率,提升了产品质量或服务水平。与此同时,协作机器人作为机械结构精细、运动控制复杂的机电系统,其在运行过程中存在性能下降、健康衰退、零部件磨损、运行风险升高等问题,会对生产企业的经济效益、甚至使用人员的人身安全造成巨大的负面影响。对协作机器人的健康状态进行及时的监控与把握、并根据其健康状态动态更新与调整维护计划,对于保障协作机器人的平稳安全运行具有重要意义和实用价值。
2、针对机器人健康评估问题,至少存在如下技术问题:
3、首先,现有神经网络模型由于其黑箱特性,所提取的信号特征一般可解释性较差,因而所给出的健康评估结果为后续运维计划制定提供的决策支持有限。此外,现有方法应用都基于数据充分的前提,即所应用的振动或电流等监测信号采集频率足够高能够包含充分的退化特征,然而实际应用中历史监测数据的可得性往往有限,限制了大部分现有方法的适用性。
4、针对上述的问题,目前尚未提出有效的解决方案。
技术实现思路
1、本发明实施例提供了一种机器人的健康指数确定方法、装置及电子设备,以至少解决相关技术中,对机器人的健康指数评估不准确的技术问题。
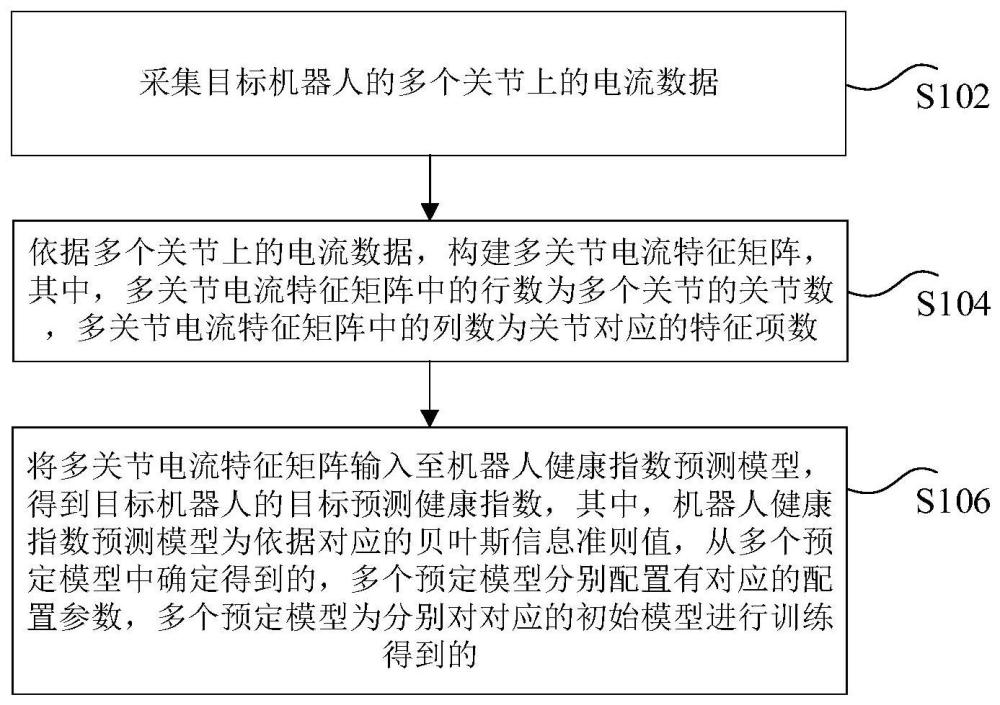
2、根据本发明实施例的一个方面,提供了一种机器人的健康指数确定方法,包括:采集目标机器人的多个关节上的电流数据;依据所述多个关节上的电流数据,构建多关节电流特征矩阵,其中,所述多关节电流特征矩阵中的行数为所述多个关节的关节数,所述多关节电流特征矩阵中的列数为关节对应的特征项数;将所述多关节电流特征矩阵输入至机器人健康指数预测模型,得到所述目标机器人的目标预测健康指数,其中,所述机器人健康指数预测模型为依据对应的贝叶斯信息准则值,从所述多个预定模型中确定得到的,所述多个预定模型分别配置有对应的配置参数,所述多个预定模型为分别对对应的初始模型进行训练得到的。
3、可选地,采用以下方式确定所述机器人健康指数预测模型:在所述配置参数包括超参数与非超参数的情况下,确定所述多个预定模型,其中,所述多个预定模型分别配置有对应的超参数;依据最大化参数的惩罚性对数似然函数值,确定所述多个预定模型分别对应的非超参数,并为所述多个预定模型配置对应的非超参数;确定配置有对应的配置参数的多个预定模型分别对应的贝叶斯信息准则值;从所述多个预定模型中,确定出最小贝叶斯信息准则值对应的模型为所述机器人健康指数预测模型。
4、可选地,采用以下方式对对应的初始模型训练,得到对应的预定模型:采用第一样本数据对所述对应的初始模型进行训练,得到所述对应的预定模型,其中,所述第一样本数据包括样本预定健康指数,样本多关节电流特征矩阵,样本预测健康指数。
5、可选地,所述采用第一样本数据对所述对应的初始模型进行训练,得到所述对应的预定模型之前,还包括:确定多个样本机器人与预定机器人,其中,所述多个样本机器人分别对应有不同范围的健康指数,所述预定机器人为对应的健康指数高于预定阈值的机器人,所述多个样本机器人、所述目标机器人与所述预定机器人的类型均相同;分别确定所述多个样本机器人分别对应的能量分布特征与预定机器人对应的能量分布特征的分布距离;依据所述多个样本机器人分别对应的分布距离,确定所述多个样本机器人分别对应的样本预定健康指数。
6、可选地,所述分别确定所述多个样本机器人分别对应的能量分布特征与预定机器人对应的能量分布特征的分布距离之前,还包括:获取多个样本机器人分别对应的在x轴方向上的第一多关节振动信号,在y轴方向上的第二多关节振动信号,以及在z轴方向上第三多关节振动信号,其中,所述对应的第一多关节振动信号、第二多关节振动信号、第三多关节振动信号为对应的样本机器人在预定周期内并处于匀速运动状态下产生的信号;将所述对应的第一多关节振动信号、第二多关节振动信号、第三多关节振动信号输入至预定小波卷积神经网络模型,得到与所述多个样本机器人分别对应的能量分布特征,其中,所述预定小波卷积神经网络模型为依据第二样本数据对初始小波卷积神经网络模型训练得到的。
7、可选地,采用以下方式依据所述第二样本数据对所述初始小波卷积神经网络模型训练,得到所述预定小波卷积神经网络模型:在所述初始小波卷积神经网络模型包括编码器模块与解码器模块的情况下,确定初始小波卷积神经网络模型,以及用于训练的所述第二样本数据,其中,所述第二样本数据包括样本多关节振动信号,样本能量分布特征;确定与所述编码器模块对应的第一小波性质约束条件,以及与所述解码器模块对应的第二小波性质约束条件基于所述第一小波性质约束条件下的编码器模块,以及所述第二小波性质约束条件下的解码器模块,采用所述第二样本数据对初始小波卷积神经网络模型进行训练,得到所述预定小波卷积神经网络模型。
8、可选地,采用以下方式依据上述第二样本数据对上述初始小波卷积神经网络模型训练,得到所述预定小波卷积神经网络模型:确定所述初始小波卷积神经网络模型,以及用于模型训练的损失函数,其中,所述损失函数包括第一损失函数项与第二损失函数项,所述第一损失函数项用于保持样本多关节振动信号与还原多关节振动信号之间的一致性,所述第二损失函数项用于保持小波性质的稳定性;基于所述损失函数,采用所述第二样本数据对所述初始小波卷积神经网络模型进行训练,得到所述预定小波卷积神经网络模型。
9、根据本发明实施例的一个方面,提供了一种机器人的健康指数确定装置,包括:采集模块,用于采集目标机器人的多个关节上的电流数据;构建模块,用于依据所述多个关节上的电流数据,构建多关节电流特征矩阵,其中,所述多关节电流特征矩阵中的行数为所述多个关节的关节数,所述多关节电流特征矩阵中的列数为关节对应的特征项数;确定模块,用于将所述多关节电流特征矩阵输入至机器人健康指数预测模型,得到所述目标机器人的目标预测健康指数,其中,所述机器人健康指数预测模型为依据对应的贝叶斯信息准则值,从所述多个预定模型中确定得到的,所述多个预定模型分别配置有对应的配置参数,所述多个预定模型为分别对对应的初始模型进行训练得到的。
10、根据本发明实施例的一个方面,提供了一种电子设备,包括:处理器;用于存储所述处理器可执行指令的存储器;其中,所述处理器被配置为执行所述指令,以实现上述任一项所述的机器人的健康指数确定方法。
11、根据本发明实施例的一个方面,提供了一种计算机可读存储介质,当所述计算机可读存储介质中的指令由电子设备的处理器执行时,使得电子设备能够执行上述任一项所述的机器人的健康指数确定方法。
12、在本发明实施例中,采集目标机器人的多个关节上的电流数据,依据多个关节上的电流数据,构建多关节电流特征矩阵,再将多关节电流特征矩阵输入至机器人健康指数预测模型,即可得到目标机器人的目标预测健康指数。由于机器人健康指数预测模型为依据对应的贝叶斯信息准则值,从多个预定模型中确定得到的,因此,保证了确定的模型是多个预定模型中准确性最高的,保证了模型预估出的目标预测健康指数的准确性。又由于多个预定模型分别配置有对应的配置参数,因此,可知考虑了不同模型配置下的准确性。多个预定模型为分别对对应的初始模型进行训练得到的,保证了预定模型也都学习到了该场景中数据的区别与联系,在使用时能够更好地提取特征,对机器人的健康指数进行更准确的评估,进而解决了相关技术中,对机器人的健康指数评估不准确的技术问题。
- 还没有人留言评论。精彩留言会获得点赞!