面向时空语义查询的图索引方法及系统
本技术涉及图索引,尤其涉及一种面向时空语义查询的图索引方法及系统。
背景技术:
1、随着卫星、无人机、gps设备等监测技术的快速发展,产生了海量的时空数据,时空数据是指在时间和空间两个维度上都具有变化的数据。它可以是二维的,如地图上的温度分布图,也可以是三维的,如气象数据中的温度、湿度和风速等。时空数据的处理需要考虑时间和空间的关系,因此需要使用专门的时空数据处理工具和算法。另外,时空数据不仅具有时空特征,时空对象之间还具有基于复杂环境关联的语义特征。目前对时空数据的研究集中在对象的时空特征上。
2、现有的常用空间索引主要有(1)基于树结构的时空索引。例如,a、时间优先的时空索引方法,常见的有hr-tree、hr+-tree、mr-tree和mv3r-tree等方法;b、空间优先的时空索引方法,常见的有 rt-tree、seti、cse、mtsb-tree和hbstr-tree等方法;c、时空同步的时空索引方法。(2)基于图结构的图索引方法,提供空间特征图结构的基础上加入了时间特征。
3、但是,现有的基于图结构的图索引方法仅考虑图结构中节点与边的结构是否匹配,而未考虑节点与边的语义信息,现有图索引技术未实现面向时空对象的时空语义查询。
技术实现思路
1、针对现有技术的上述不足,本技术提供一种面向时空语义查询的图索引方法及系统,以解决现有的方法仅考虑图结构中节点与边的结构是否匹配,而未考虑节点与边的语义信息的问题。
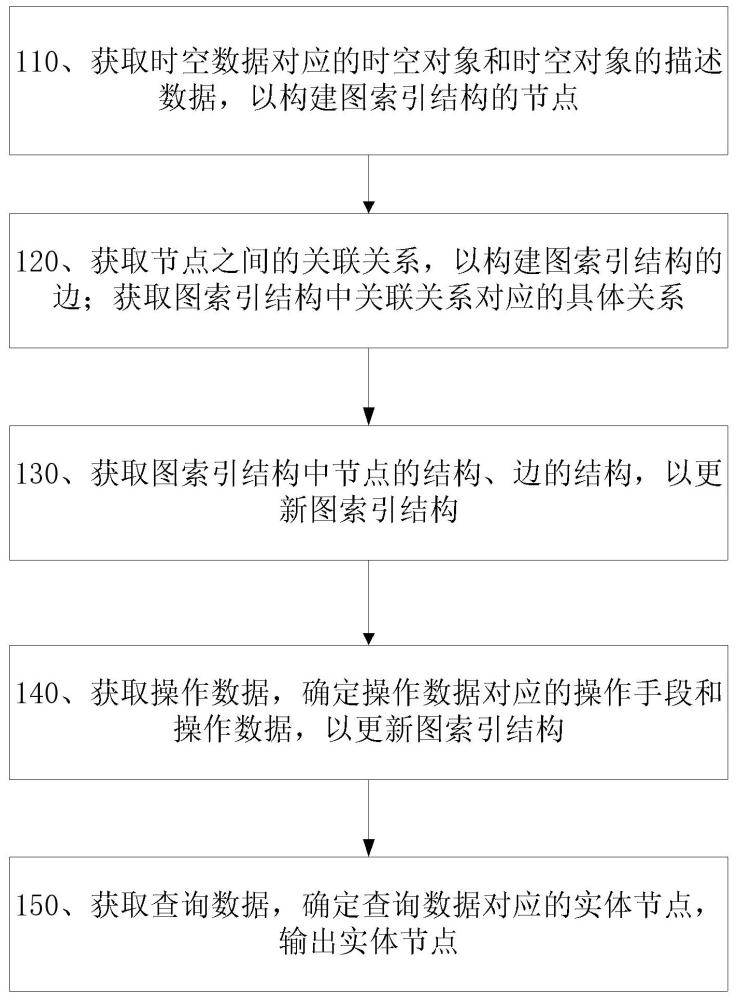
2、第一方面,本技术提供了一种面向时空语义查询的图索引方法,方法包括:获取时空数据对应的时空对象和时空对象的描述数据,以构建图索引结构的节点;其中,节点分为实体节点、时间节点、空间节点和特征节点,且时空对象对应实体节点,描述数据对应的时间节点、空间节点和特征节点;获取节点之间的关联关系,以构建图索引结构的边;获取图索引结构中关联关系对应的具体关系;其中,具体关系包括:时间关联关系、空间关联关系和语义关联关系;获取图索引结构中节点的结构、边的结构,以更新图索引结构;获取操作数据,确定操作数据对应的操作手段和操作数据,以更新图索引结构;其中,操作手段至少包括生成、增加、删除、修改,操作数据为时空对象、时空对象的描述数据、关联关系;获取查询数据,确定查询数据对应的实体节点,输出实体节点。
3、进一步地,获取图索引结构中关联关系对应的具体关系,具体包括:获取时空数据中的时间信息,将时间信息划分为时间点和时间段;获取时间点和时间点、时间点和时间段、时间段和时间段之间的关系作为时间关联关系;获取时空数据中的时空对象,将时空对象划分为空间面积;基于空间面积,获取时空对象之间的空间拓扑关系作为空间关联关系;获取非空间拓扑关系的预设定义语义关联,以作为语义关联关系;其中,预设定义语义关联至少包括:继承关系、派生关系、依赖关系、聚类关系、共生关系、制约关系、竞争关系、促进关系和互助关系。
4、进一步地,节点为hashmap形式,且分为实体节点、时间节点、空间节点和特征节点;其中,实体节点的结构为:id,name,map;其中,id表示全局唯一的识别码,且实体节点的id由e+uid1组成,e表示实体节点类型,uid1是节点生成时的序号,name表示实体节点的预设实体类型码,map表示实体节点到对应的实体数据的映射;时间节点的结构为:id,timecode;其中,id表示全局唯一的识别码,时间节点的id由t+uid2组成,t表示时间节点类型,uid2是节点生成时的序号,timecode表示时间编码;空间节点的结构为:id,spatialcode,coordinate;其中,id全局唯一的识别码,空间节点的id由s+uid3组成,s表示空间节点类型,uid3是节点生成时的序号,spatialcode表示空间对象的geohash编码,coordinate表示空间对象的坐标信息;特征节点的结构为:id,characteristic;其中,id表示全局唯一的识别码,特征节点的id由c+uid4组成,c表示特征节点类型,uid4是节点生成时的序号,characteristic表示特征值;边为hashmap形式,且边的结构为:id,relationship;其中,id表示全局唯一的识别码,由起始节点的id与目标节点的id组成,relationship表示具体关联关系的类型。
5、进一步地,图索引结构还包括全局矩阵、关联关系矩阵和关系表;获取操作数据,确定操作数据对应的操作手段和操作数据,以更新图索引结构,具体包括:在操作手段为生成时,从操作数据中提取时空对象,以生成实体节点;从操作数据中提取时空对象的描述数据的内容描述数据,以生成特征节点;从操作数据中提取时空对象的描述数据的时间信息,生成对应的时间编码,确定时间编码对应的时间节点是否存在;在存在时,不再生成新的时间节点;在不存在时,生成新的时间节点;从操作数据中提取时空对象的描述数据的空间信息,将空间信息转换为geohash编码,并获得空间信息中的坐标信息,确定是否存在geohash编码和坐标信息一致的空间节点,在确定存在一致的空间节点时,不再生成新的空间节点,在不存在一致的空间节点时,生成新的空间节点;在节全部生成完毕后,从操作数据中提取关联关系,建立实体节点与实体节点对应的特征节点、时间节点和空间节点之间的边,且方向为实体节点指向特征节点、时间节点和空间节点、边类型分别为characteristic、spatial和temporal;建立实体节点和实体节点之间、特征节点和特征节点之间的边,方向为起始节点指向目标节点,边类型为语义关联的关系类型;通过全局矩阵记录存在关联关系的两个节点;其中,全局矩阵的行表示起始节点,列表示目标节点;在节点之间存在关联关系时,将矩阵对应行列处位置的值设置为1,没有关联关系则设置为0;通过关联关系矩阵记录存在关联关系的两个节点的起始节点和目标节点;其中,关联关系矩阵的行表示起始节点,列表示目标节点;在节点之间存在关联关系时,将矩阵对应行列处位置的值设置为1,没有关联关系则设置为0;通过关系表记录节点之间存在的所有关联关系。
6、进一步地,获取操作数据,确定操作数据对应的操作手段和操作数据,以更新图索引结构,具体还包括:在操作手段为增加时,从操作数据中确定增加类型;在增加类型为节点增加时,基于操作数据,生成对应的节点;在增加类型为边增加时,基于操作数据,生成对应的边;更新图索引结构中的全局矩阵、关联关系矩阵和关系表。
7、进一步地,获取操作数据,确定操作数据对应的操作手段和操作数据,以更新图索引结构,具体包括:在操作手段为删除时,从操作数据中确定删除类型;在删除类型为节点时,删除操作数据对应的节点,确定是否存在以删除的节点为起点节点或终点节点的边,在存在时,删除对应的边;更新图索引结构中的全局矩阵、关联关系矩阵和关系表;在删除类型为边时,删除操作数据对应的边,确定删除的边对应的起始节点和目标节点是否只存在一种关联关系;在只存在一种关联关系时,更新图索引结构中的全局矩阵、关联关系矩阵和关系表;在大于一种关系时,更新图索引结构中的关联关系矩阵和关系表。
8、进一步地,获取操作数据,确定操作数据对应的操作手段和操作数据,以更新图索引结构,具体包括:在操作手段为修改时,从操作数据中确定修改类型;在修改类型为节点时,修改操作数据对应节点,进而更新节点对应的边;进而更新图索引结构中的全局矩阵、关联关系矩阵和关系表;在修改类型为边时,修改操作数据对应边,进而更新图索引结构中的全局矩阵、关联关系矩阵和关系表。
9、进一步地,查询数据包括时空语义查询,且时空语义查询包括时间信息、空间信息和语义关联约束;获取查询数据,确定查询数据对应的实体节点,输出实体节点,具体包括:在确定查询数据同时存在时间信息和空间信息时,将时间信息转化为时间编码,将空间信息转化为geohash编码;确定时间编码对应的时间节点和geohash编码对应的空间节点;在temporal的关联关系矩阵中查询与时间节点相关联的实体节点集合s1;在spatial的关联关系矩阵中查询与空间节点相关联的实体节点集合s2,取s1与s2的交集s;在确定查询数据只存在时间信息时,将时间信息转化为时间编码,确定时间编码对应的时间节点,在temporal的关联关系矩阵中查询与时间节点相关联的实体节点集合s;在时间编码无对应的时间节点时,直接返回空值;在确定查询数据只存在空间信息时,将空间信息转化为geohash编码;确定geohash编码对应的空间节点,在spatial的关联关系矩阵中查询与空间节点相关联的实体节点集合s;在geohash编码无对应的空间节点时,直接返回空值;判断集合s是否为空,在不为空时,确定查询数据中是否存在语义关联约束,在语义关联约束对应的关联关系矩阵中查询矩阵行列处的值为1的节点集合c;确定集合c和集合s的交集h,确定交集h中的实体节点为输出实体节点;判断集合s是否为空,在为空时,确定集合s中的实体节点为输出实体节点。
10、进一步地,查询数据包括推理查询,且推理查询包括推理起始节点、推理目标节点和推理阶数;获取查询数据,确定查询数据对应的实体节点,输出实体节点,具体包括:确定推理阶数是否大于等于0,在大于等于0时,s1,从全局矩阵中确定以推理起始节点为起始节点的目标节点中是否存在推理目标节点;s2,在存在推理目标节点时,从目标节点中去掉推理目标节点,以获得中间节点;s3,更新中间节点为推理起始节点,令推理阶数=推理阶数-1;迭代s1-s3获得中间节点,直至推理阶数小于0;输出迭代过程中的中间节点和推理起始节点与中间节点之间的关联关系。
11、第二方面,本技术提供了一种面向时空语义查询的图索引系统,系统包括:获取模块,用于获取时空数据对应的时空对象和时空对象的描述数据,以构建图索引结构的节点;其中,节点分为实体节点、时间节点、空间节点和特征节点,且时空对象对应实体节点,描述数据对应的时间节点、空间节点和特征节点;获取节点之间的关联关系,以构建图索引结构的边;获取图索引结构中关联关系对应的具体关系;其中,具体关系包括:时间关联关系、空间关联关系和语义关联关系;更新模块,用于获取图索引结构中节点的结构、边的结构,以更新图索引结构;获取操作数据,确定操作数据对应的操作手段和操作数据,以更新图索引结构;其中,操作手段至少包括生成、增加、删除、修改,操作数据为时空对象、时空对象的描述数据、关联关系;输出模块,用于获取查询数据,确定查询数据对应的实体节点,输出实体节点。
12、本领域技术人员能够理解的是,本技术至少具有如下有益效果:
13、本技术将节点划分为时空对象和时空对象的描述数据(实体节点、时间节点、空间节点和特征节点),获取节点之间的关联关系,实现了节点与边的匹配,解决了现有的基于图结构的图索引方法仅考虑图结构中节点与边的结构是否匹配,而未考虑节点与边的语义信息,现有图索引技术未实现面向时空对象的时空语义查询的问题。
- 还没有人留言评论。精彩留言会获得点赞!