本发明涉及地图生成,尤其涉及一种古文物数字地图智能生成方法。
背景技术:
1、数字考古已成为信息时代考古学发展的大趋势,这一技术以考古现场的空间信息与文物信息获取、制图等工作为起点,结合历史文化遗产空间分析模拟、虚拟现实展示、数据库建设等工作,实现数字化保存、传输和共享,从而为考古领域研究、文物古迹保护及各类数据存档等提供信息化支持。
2、现有的技术中数据量大,由于不可移动的文物资源往往分布广泛,数量众多,形态复杂,因此采集到的数据量也非常庞大,给数据存储、传输和处理带来了巨大的挑战。现有的技术中数据精度低,由于采集到的数据存在噪声、遮挡、缺失等问题,因此处理后得到的特征点或表面模型可能存在误差或失真,不能完全还原文物的真实状态。现有的技术中数据传播难,由于沉浸式技术需要特定的设备和环境,如头戴式显示器、手柄、跟踪器等,因此对用户的使用条件有一定的限制,不利于文物数据的广泛传播和普及。因此,如何提供一种古文物数字地图智能生成方法是本领域技术人员亟需解决的问题。
技术实现思路
1、本发明的一个目的在于提出一种古文物数字地图智能生成方法,本发明可以提高古文物数字化测绘的效率、准确度、清晰度和真实感,通过利用深度学习和计算机视觉等人工智能技术,对影像数据或点云数据进行自动化、智能化的处理,如滤波、配准、分割、匹配、识别等,提取高质量、高密度的特征点或表面模型。
2、根据本发明实施例的一种古文物数字地图智能生成方法,包括如下方法步骤:
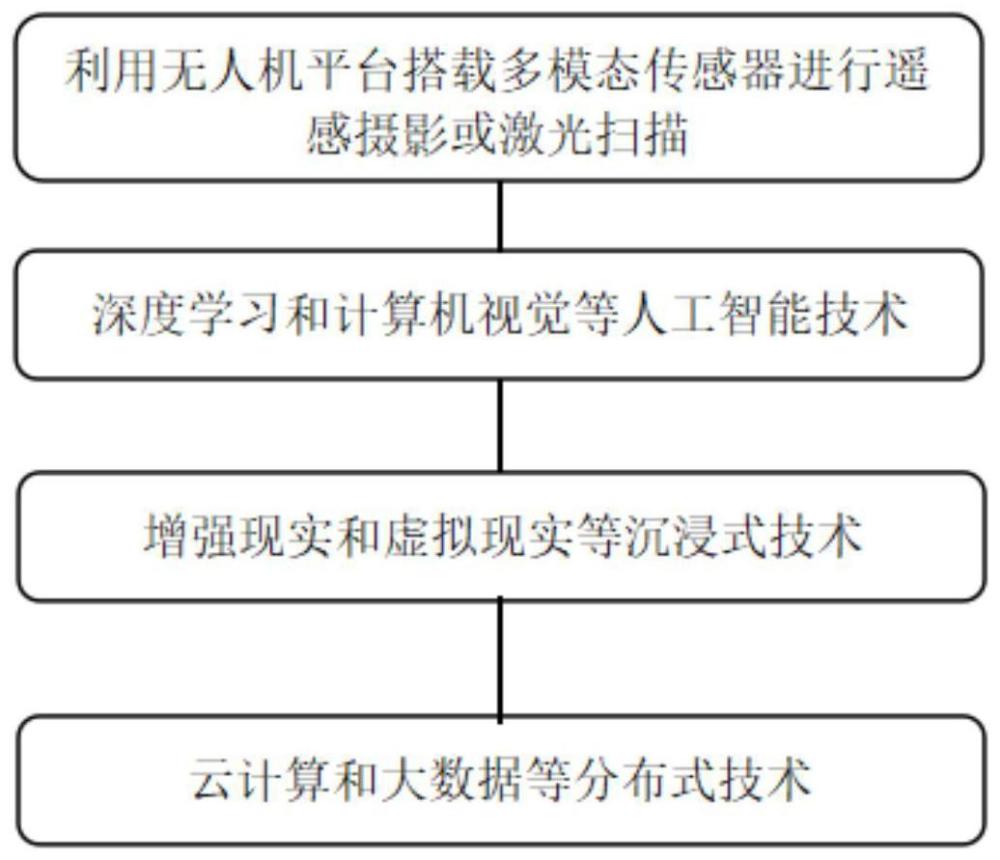
3、s1、利用无人机平台搭载多模态传感器,对古文物进行的遥感摄影或激光扫描,获取影像数据或点云数据;
4、s2、利用深度学习和计算机视觉技术,对影像数据或点云数据进行滤波、配准、分割、匹配和识别处理;
5、s3、利用增强现实和虚拟现实技术,对特征点或表面模型进行真实和动态的虚拟复原和展示;
6、s4、利用云计算和大数据技术,对古文物数据进行存储、分析和共享。
7、可选的,所述s1具体包括进行控制测量,建立控制网和控制点,进行遥感摄影或激光扫描,获取文物的影像数据或点云数据,进行影像处理或点云处理,提取特征点或表面模型,进行数据转换和输出,生成数字地图或三维模型。
8、可选的,所述控制测量包括根据已知的控制点坐标和相应的像点坐标,建立空间后方交会方程或正射变换方程,通过最小二乘法求解出未知参数或坐标:
9、
10、
11、其中,(x,y,z)是物点的空间坐标,(x,y,z)是摄影中心的空间坐标,f是相机的焦距,(a1,b1,c1)是像点的像空坐标,rij是旋转矩阵的元素,(x′,y′)是像点的像平面坐标,(x,y)是物点的地面平面坐标,ai和bi是正射变换参数;
12、所述遥感摄影或激光扫描包括利用遥感摄影机或激光扫描仪对文物进行成像或扫描,获取文物的影像数据或点云数据:
13、i(x,y)=f(l(x,y),r(x,y),g(x,y),b(x,y));
14、p(x,y,z)=g(l(x,y,z),r(x,y,z),g(x,y,z),b(x,y,z));
15、其中,i(x,y)是影像数据,f是影像函,l(x,y)是亮度值,r(x,y),g(x,y),b(x,y)是红、绿、蓝三色值,p(x,y,z)是点云数据,g是点云函数;
16、所述影像处理或点云处理包括利用图像处理或计算机枧觉技术手段对影像数据或点二数据进行滤波、配准、分割、匹配操作,提取特征点或表面模型:
17、i′(x,y)=h(i(x,y),k);
18、p′(x,y,z)=i(p(x,y,z),k);
19、其中,i′(x,y)是处理后的影像数据,h是图像处理函数,k是滤波器或变换矩阵等参数,p′(x,y,z)是处理后的点云数据,i是计算机视觉函数;
20、所述数据转换和输出包括利用插值、拟合、投影技术手段对特征点或表面模型进行数据转换,生成数字地图或三维模型:
21、z(x,y)=j(x(x,y),y(x,y),z(x,y));
22、m(x,y,z)=k(x(x,y,z),y(x,y,z),z(x,y,z));
23、其中,z(x,y)是数字地图,j是插值或拟合函数,m(x,y,z)是三维模型,k是投影或变换函数。
24、可选的,所述滤波包括对影像数据或点云数据进行去噪、平滑、增强操作,所述配准包括将不同视角或不同时间的影像数据或点云数据对剂到同一坐标系下:
25、
26、其中,r和t是旋转矩阵和平移向量,表示从源数据到目标数据的变换参数,pi和qi是源数据和目标数据中的对应点;
27、所述分割包括将影像数据或点云数据划分为具有相似性质或语义含义的区域或对象:
28、
29、其中,s是分割结果,表示将数据划分为k个子集,si表示第i个子集,ci表示第i个子集的中心或代表点
30、所述匹配包括寻找影像数据或点云数据中的相似或重复的模式或结构:
31、
32、其中,i是影像数据,t是模板,(x,y)是模板在影像数据中的最佳位置;
33、所述识别包括对影像数据或点云数据中的区域或对象进行分类或标注:
34、y=f(x;w);
35、其中,y是数据的类别,x是数据的特征,w是分类器的参数,f是分类器的函数。
36、可选的,所述s3包括利用计算机图形学、人机交互、冬媒体方法对特征点或表面模型进行真实和动态的虚拟复原和展示,模拟古文物的外观和行为,让用户与之进行交互。
37、可选的,所述虚拟复原包括利用特征点或表面模型重建古文物的三维几何形状,并根据历史资料或专家意见恢复古文物的纹理、颜色、光照细节:
38、m=f(i,p);
39、m′=g(m,t);
40、其中,m是三维模型,f是基于图像的复原函数,i是影像数据,p是点云数据,m′是复原后的三维模型,g是基于模型的复原函数,t是模板或模型;
41、所述虚拟展示包括利用计算机图形学、人机交互、名媒体方法对复原后的三维模型进行渲染、动画、音效处理,并通过不同的设备或平台呈现给用户:
42、i′(x,y)=h(i(x,y),m,r,t);
43、i″(x,y)=i(m,r,t);
44、其中,i′(x,y)是基于增强现实的展示结果,h是增强现实的展示函数,i(x,y)是真实环境的影像数据,m是三维模型,r和t是旋转矩阵和平移向量,表示从三维模型到真实环境的变换参数,i″(x,y)是基于虚拟现实的展示结果,i是虚拟现实的展示函数。
45、可选的,所述s4包括利用互联网、虚拟化、焦群、并行计算方法,将分散在不同地点的计算盗源和数据盗源整合起来形成一个分布式系统,为用户提供各种服务和应用。
46、可选的,所述存储包括对古文物数据进行安全和稳定的保存和备份:
47、b={b1,b2,…,bn};
48、f={f1,f2,…,fn};
49、o={o1,o2,…,on};
50、其中,b是基于块的存储集合,bi是第i个块,f是基于文件的存储集合,fi是第i个文件,o是基于对象的存储集合,oi是第i个对象。
51、可选的,所述分析包括对古文物数据进行处理和挖掘:
52、y=f(x);
53、y=g(x,s);
54、y=h(x,w);
55、其中,y是分析结果,x是输入数据,f是基于批处理的分析函数,g是基于流处理的分析函数,s是状态或谷口参数,h是基于机器学习的分析函数,w是模型或权重参数。
56、可选的,所述共享包括对古文物数据进行交换和传输:
57、q={q1,q2,…,qn};
58、t={t1,t2,…,tn};
59、s={s1,s2,…,sn};
60、其中,q是基于消息队列的共享集合,qi是第i个队列,t是基于发布订阅的共享集合,ti是第i个主题或频道,s是基于服务总线的共享集合,si是第i个中间件或代理;
61、所述可视化包括对古文物数据进行图形化和交互化的展示:
62、g={g1,g2,…,gn};
63、m={m1,m2,…,mn};
64、n={n1,n2,…,nn};
65、其中,g是基于图表的可视化集合,gi是第i个图表,m是基于地图的可视化集合,mi是第i个地图,n是基于网络的可视化集合,ni是第i个网络。
66、本发明的有益效果是:
67、(1)本发明可以提高古文物数字化测绘的效率、准确度、清晰度和真实感,通过利用无人机平台搭载多模态传感器,对古文物进行全方位、多角度、多波段的遥感摄影或激光扫描,获取高分辨率、高清晰度、高准确度的影像数据或点云数据;通过利用深度学习和计算机视觉等人工智能技术,对影像数据或点云数据进行自动化、智能化的处理,如滤波、配准、分割、匹配、识别等,提取高质量、高密度的特征点或表面模型。
68、(2)本发明可以实现古文物数据的多维度、多层次、多形式的展示和交互,通过利用增强现实和虚拟现实等沉浸式技术,对特征点或表面模型进行真实和动态的虚拟复原和展示,模拟古文物的外观和行为,让用户能够沉浸式地体验古文物的世界,并与之进行交互;通过利用云计算和大数据等分布式技术,对古文物数据进行安全和稳定的存储、分析和共享,实现古文物数据的整合、查询、统计、可视化等功能,并支持不同平台和设备的访问。
69、(3)本发明可以促进古文物保护与修复的科学性和规范性,通过建立矿藏级别的古文物数字档案,为古文物提供全面、系统、科学的记录和信息,为古文物保护与修复提供可靠的依据和参考;通过实现古文物数据的数字化转化和再利用,为古文物保护与修复提供新的手段和渠道。