阵列干涉合成孔径雷达三维点云去噪的方法、装置及设备与流程
本发明涉及一种阵列干涉合成孔径雷达三维点云去噪的方法、装置及设备,属于阵列干涉合成孔径雷达(synthetic aperture radar,sar)数据处理与应用。
背景技术:
1、相比合成孔径雷达二维成像技术,合成孔径雷达三维成像技术能够消除由雷达侧视成像方式导致的目标叠掩现象,显著提升目标分辨识别能力,是sar技术发展的重要方向之一。阵列干涉sar技术利用跨航向的阵列天线进行侧视成像,在获得的多角度观测数据基础上,通过阵列干涉sar三维成像技术实现复杂场景的三维重建,获得区域三维点云。由于受到天气、环境、设备、成像方式等的影响,阵列干涉sar点云中可能存在一些杂点和错误点,影响阵列干涉sar点云的进一步应用。
2、为了获取更高质量的阵列干涉sar点云,需要在进一步处理前对所有的点云进行去噪处理。常用的点云去噪方法包括:(1)针对所有噪声的单级滤波方法,这种去噪方法对所有噪声综合考虑,在视觉上取得了较好的去噪效果,但是这也可能导致部分区域被过度处理,从而使点云细节特征丢失。(2)对不同噪声分别进行处理的层次化多级去噪方法,该种方法考虑了不同的噪声的分布方式和特点,有针对性地采用相应的滤波算法,使得细节特征保留较好。此外,还有对区域进行划分的去噪方式,即将需要去噪的点云数据按照场景进行划分,对不同的场景采取不同的去噪算法,这也在一定程度上提高了去噪的效果。
3、与其他点云获取方式不同,阵列干涉sar三维成像技术获取的点云数据主要是通过对sar影像配准后重解算得到。另外由于sar是相干成像的方式,阵列干涉sar点云中的错杂点较多,且存在因多路径效应导致的镜像噪声。因此,阵列干涉sar点云具有的噪声点种类较多,导致传统点云去噪算法应用效果差,去噪后的点云中仍存在大量的噪声点。
技术实现思路
1、为了解决上述问题,本发明提出了一种阵列干涉合成孔径雷达三维点云去噪的方法、装置及设备,能够解决现有点云去噪技术无法直接应用于阵列干涉sar点云的难题,有效提高点云的精度。
2、本发明为解决其技术问题所采取的技术方案是:
3、第一方面,本发明实施例提供的一种阵列干涉合成孔径雷达三维点云去噪的方法,包括如下步骤:
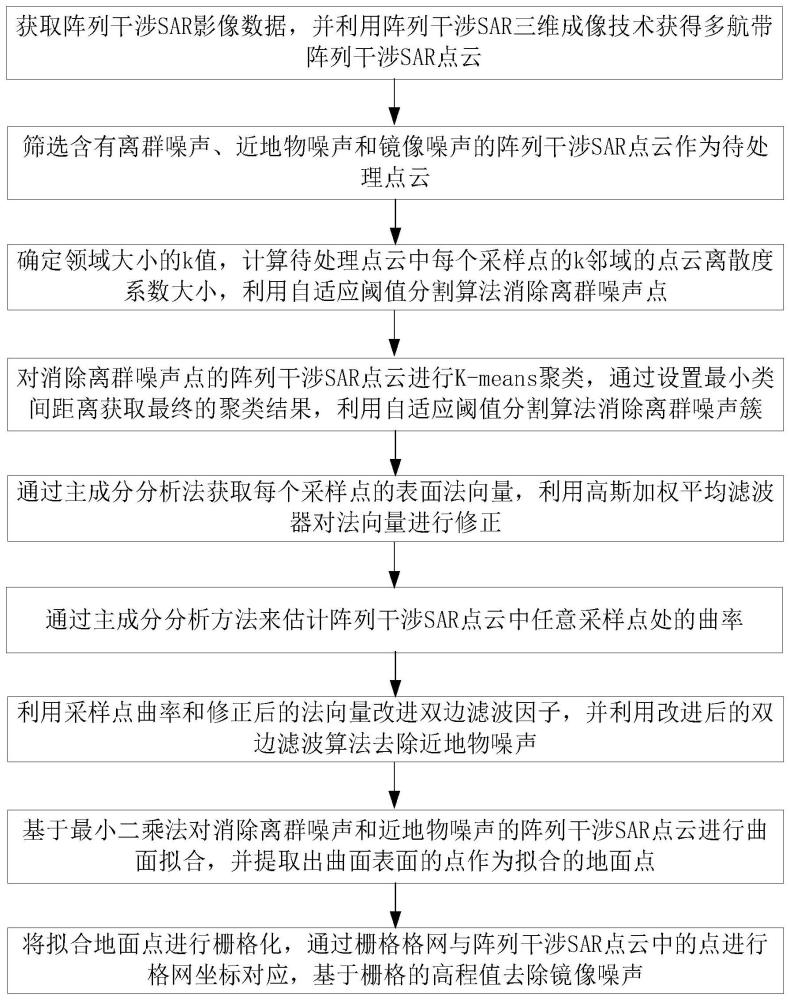
4、获取阵列干涉sar影像数据,并利用阵列干涉sar三维成像技术获得多航带阵列干涉sar点云;
5、筛选含有噪声的阵列干涉sar点云作为待处理点云;
6、确定领域大小的k值,计算待处理点云中每个采样点的k邻域的点云离散度系数大小,利用自适应阈值分割算法消除离群噪声点;
7、对消除离群噪声点的阵列干涉sar点云进行k-means聚类,通过设置最小类间距离(mindistance)获取最终的聚类结果,利用自适应阈值分割算法消除离群噪声簇;
8、通过主成分分析法获取每个采样点的表面法向量,利用高斯加权平均滤波器对法向量进行修正;
9、通过主成分分析方法来估计阵列干涉sar点云中任意采样点处的曲率;
10、利用采样点曲率和修正后的法向量改进双边滤波因子,并利用改进后的双边滤波算法去除近地物噪声;
11、基于最小二乘法对消除离群噪声和近地物噪声的阵列干涉sar点云进行曲面拟合,并提取出曲面表面的点作为拟合的地面点;
12、将拟合地面点进行栅格化,通过栅格格网与阵列干涉sar点云中的点进行格网坐标对应,基于栅格的高程值去除镜像噪声。
13、作为本实施例一种可能的实现方式,所述采样点的k邻域的点云离散度系数为当前采样点与其k近邻范围内的所有点间的距离的平均值,计算公式为:
14、
15、其中,pcdc为当前采样点的点云离散度系数,k为邻域大小,qi∈x为k邻域内的点集,为采样点p与任一邻域点qi之间的欧式距离。
16、作为本实施例一种可能的实现方式,在对消除离群噪声点的阵列干涉sar点云进行k-means聚类后,通过公式(2)对原始点云的离群噪声簇和地物点进行分割评价:
17、m=q1(b1-bg)2+q2(b2-bg)2 (2)
18、其中,为地物点云类别的类内点数值的总比例,为离群噪声簇类别的类内点数值的总比例,为地物点云的类内点数平均值,为离群噪声簇的类内点数平均值。
19、作为本实施例一种可能的实现方式,所述每个采样点的表面法向量为:
20、
21、其中,为采样点的k邻域内的点pi的法向量,为采样点p与其k邻域内的点pi之间的欧氏距离,σn为k邻域内的点之间的平均距离对法向量的影响因子。
22、作为本实施例一种可能的实现方式,所述采样点处的曲率为:
23、
24、ωi为采样点pi处的曲率,λ1,λ2,λ3为对采样点的k邻域点协方差矩阵进行特征分解得到的特征值,λ1<λ2<λ3,最小特征值λ1对应的特征向量为采样点pi的法向量。
25、作为本实施例一种可能的实现方式,所述利用采样点曲率和修正后的法向量改进双边滤波因子,并利用改进后的双边滤波算法去除近地物噪声,包括:
26、将采样点曲率和优化后的采样点法向量作为参数改进双边滤波因子αi:
27、
28、其中,wc、ws均为高斯核函数,表示近邻点对采样点pi的影响权重,为采样点pi到邻域点距离的光滑平顺权重,x=||pi-pj||,为采样点pi到邻域点距离的特征域权重,y=||<ni,nj>-1||+ωi;σc表示采样点pi到每个近邻点的距离对该点的影响因子,一般取邻域的半径;σs表示每个近邻点在采样点pi处的法向量上投影距离对该点的影响因子,一般取近邻点的标准偏差;当σc确定后,点云在法向上的平滑距离与σs成正比;ni,nj分别为采样点pi和采样点pj处的优化法向量;
29、根据改进的双边滤波因子αi计算采样点pi去除近地物噪声后的几何位置:
30、p′i=pi+αi·ni (8)。
31、作为本实施例一种可能的实现方式,所述基于最小二乘法对消除离群噪声和近地物噪声的阵列干涉sar点云进行曲面拟合的公式为:
32、z(x,y)=ax2+bxy+cy2+dx+ey+f (9)
33、其中,a、b、c、d、e和f为曲面拟合系数。
34、第二方面,本发明实施例提供的一种阵列干涉合成孔径雷达三维点云去噪的装置,包括:
35、数据采集模块,用于获取阵列干涉sar影像数据,并利用阵列干涉sar三维成像技术获得多航带阵列干涉sar点云;
36、点云筛选模块,用于筛选含有噪声的阵列干涉sar点云作为待处理点云;
37、离群噪声点消除模块,用于确定领域大小的k值,计算待处理点云中每个采样点的k邻域的点云离散度系数大小,利用自适应阈值分割算法消除离群噪声点;
38、离群噪声簇消除模块,用于对消除离群噪声点的阵列干涉sar点云进行k-means聚类,通过设置最小类间距离(mindistance)获取最终的聚类结果,利用自适应阈值分割算法消除离群噪声簇;
39、法向量获取模块,用于通过主成分分析法获取每个采样点的表面法向量,利用高斯加权平均滤波器对法向量进行修正;
40、曲率计算模块,用于通过主成分分析方法来估计阵列干涉sar点云中任意采样点处的曲率;
41、近地物噪声去除模块,用于利用采样点曲率和修正后的法向量改进双边滤波因子,并利用改进后的双边滤波算法去除近地物噪声;
42、曲面拟合模块,用于基于最小二乘法对消除离群噪声和近地物噪声的阵列干涉sar点云进行曲面拟合,并提取出曲面表面的点作为拟合的地面点;
43、镜像噪声去除模块,用于将拟合地面点进行栅格化,通过栅格格网与阵列干涉sar点云中的点进行格网坐标对应,基于栅格的高程值去除镜像噪声。
44、第三方面,本发明实施例提供的一种计算机设备,包括:处理器、存储器和总线,所述存储器存储有所述处理器可执行的机器可读指令,当所述计算机设备运行时,所述处理器与所述存储器之间通过总线通信,所述处理器执行所述机器可读指令,以实现如上任一所述的阵列干涉合成孔径雷达三维点云去噪的方法。
45、第四方面,本发明实施例提供的一种计算机可读存储介质,所述存储介质存储有计算机程序,所述计算机程序用于执行如上任一所述的阵列干涉合成孔径雷达三维点云去噪的方法。
46、本发明实施例的技术方案所产生的有益效果如下:
47、本发明实施例的技术方案的一种阵列干涉合成孔径雷达三维点云去噪方法,利用航空平台搭载阵列干涉sar天线获取阵列干涉sar影像,进行图像配准和逐像素解算后获得多航带三维点云;对阵列干涉sar点云中的噪声分布情况进行分析,并将噪声分为离群噪声、近地物噪声和镜像噪声三类,并构建基于噪声分类的分级式噪声去除方法,对三种不同类型的噪声分别采取不同的去噪算法以去除阵列干涉sar点云中的噪声点;本发明适用于解决阵列干涉sar点云噪声难以去除的问题,消除了阵列干涉sar点云中的粗差点和错误点,提高了阵列干涉sar点云数据的几何精度,有利于阵列干涉sar产品的应用。
48、考虑到层析sar技术会受到sar技术本身特点的影响,与阵列干涉sar技术特点具有相似之处,本发明提出的基于噪声分类的分级式阵列干涉sar点云去噪方法同样适用于解决层析sar点云的去噪问题。本发明基于噪声分类进行分级式滤波而不是对所有的噪声类型采用一种滤波算法进行点云去噪,有效避免了去噪后的阵列干涉sar点云因过去噪导致的表面细节丢失、尖锐特征消失的问题。本发明基于噪声分类进行分级式滤波处理,能够有效去除点云中的噪声点,并更好地保留点云中的特征信息。本发明有效消除了了阵列干涉sar点云的粗差点和错误点,提高了阵列干涉sar点云的精度,能够进一步促进阵列干涉sar技术在地形测绘中的应用。
- 还没有人留言评论。精彩留言会获得点赞!