基于点云数据的设备结构分割方法、系统和存储介质与流程
本技术涉及电网,尤其涉及基于点云数据的设备结构分割方法、系统和存储介质。
背景技术:
1、由扫描快速获取的电网场站点云数据,是电网数字孪生体、自动化建设的基础,是实现高质量、高真实性电网复杂环境动态全要素监管的关键。地面三维激光扫描仪采用激光测距的方法,能够高效地获取目标区域的三维数据,所以基于激光点云数据进行数字孪生模型的自动构建在实际生产中具有较大的意义。
2、当前数字孪生模型几乎都是采用人工建模方式,针对采集的激光点云数据,一旦构建好模型后,更新困难,数据库中的三维模型无法体现变更后的真实地物对象,不利于对现状的真实表示,以及技术协同服务能力建设。
3、打通点云数据和已有模型的局部更新的技术屏障,是数字孪生全生命周期全要素管理的基础保障。实际应用中,日常维护通常需要更换设备的部分零件而不是整个设备,不同零件具有不同的寿命和更换周期,构建设备的多级零件层次结构关系对于数字孪生三维模型的维护更新和生命周期管理至关重要。
4、地面激光点云能够捕获物体表面三维信息,是变电场站三维重建、数字孪生等应用的重要数据来源。通过采集获取到点云数据后,非常重要一个步骤是对象部件分割,它将点云数据中无任何关联的各个点,按语义功能部件进行解构并建立联系,形成如开关、变压器、电缆等功能部件,为精细的三维重建和数字孪生提供模型底座。对象零件分割有助于用户理解组成物体的各个功能部件在空间中的结构和联系,这些功能部件的空间位置与拓扑关系为设备全生命周期精细化管理和全息复杂物理场分析提供支撑。
5、然而,零件级对象分割在电网实际应用中存在诸多挑战,如点云密度不均、零件姿态和形状复杂多样、缺乏可用于ai训练的大量带标签的点云数据、缺乏零件语义数据等问题;因采集成本高相关的可用数据较少,带标签的数据更是罕见,基于深度学习的方法依赖大量数据进行训练,限制了其在电网设备自动建模上的应用。
技术实现思路
1、针对现有技术的不足,本技术提出了一种基于点云数据的设备结构分割方法、系统和存储介质,该方法采用自顶向下的方法,根据点云数据中呈现的自然分布特点,以体素关联具体的点数据,在体素化的整数坐标基础上,自适应地对设备点云数据进行分割并同步构建多级零件层次结构,解决了基于点云数据的电网设备的层次零件结构的自动构建问题。
2、为了实现上述目的,本技术技术方案如下:
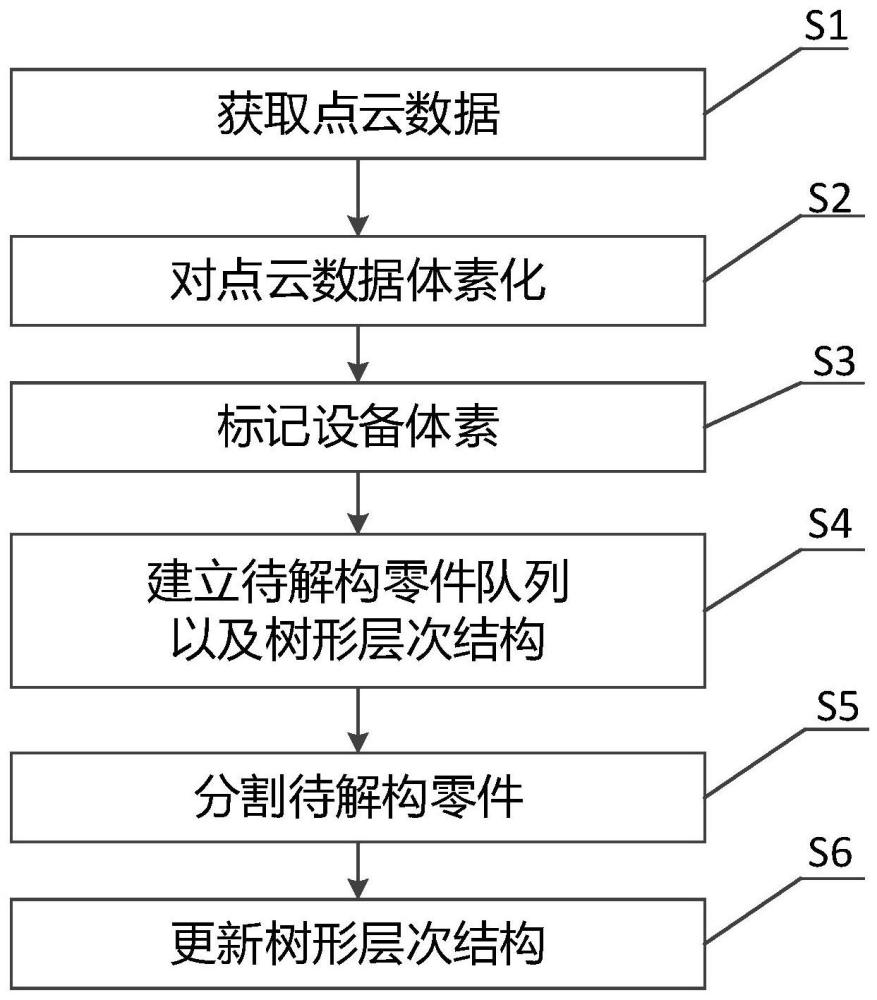
3、一种基于点云数据的设备结构分割方法,包括以下步骤s1-s6:
4、s1、获取点云数据:获取设备的点云数据。
5、点云数据包含设备的表面点云数据和内部点云数据。
6、s2、对点云数据体素化:通过主成分分析对点云数据体素化,得到体素化点云数据。
7、s3、标记设备体素:根据体素化点云数据,标记设备占据的表面体素和内部体素。
8、s4、建立待解构零件队列以及树形层次结构:根据设备的体素标记对设备占据的体素进行分解,建立设备的待解构零件队列以及树形层次结构。
9、s5、分割待解构零件:根据待解构零件队列的表面体素分布特征,分别对各待解构零件的体素进行分割,得到各待解构零件对应的若干子零件体素队列。
10、s6、更新树形层次结构:根据子零件体素队列更新树形层次结构。
11、可选地,步骤s2包括以下步骤s21-s24:
12、s21、对点云数据进行去中心化处理,得到去中心化点云数据。
13、s22、计算去中心化点云数据的协方差矩阵,得到中心化点云数据的特征向量和特征值。
14、s23、根据特征向量和特征值,构造线性变换矩阵,将点云数据从原三维坐标系转换至与主成分分析相对齐的空间下的新三维坐标系。
15、s24、对新三维坐标系下的点云数据进行体素化,得到体素化点云数据。
16、可选地,步骤s21包括以下步骤s211-s212:
17、s211、计算点云数据的几何中心。
18、s212、将点云数据从点坐标转换为相对于几何中心的偏移坐标,得到去中心化点云数据。
19、可选地,步骤s3包括以下步骤s31-s34:
20、s31、分别确认体素化点云数据在新三维坐标系的每个坐标轴上的最大值和最小值。
21、s32、根据每个坐标轴上的最大值和最小值,确定设备在新三维坐标系中所对应的最小长方体空间。
22、s33、在最小长方体空间逐一排除空体素并搜索设备表面所占的体素,得到设备占据的表面体素。
23、s34、将最小长方体空间内的剩余体素标记为内部体素。
24、可选地,步骤s4包括以下步骤s41-s45:
25、s41、创建初始化的待解构零件队列和树形层次结构。
26、s42、根据设备的体素标记,计算设备的体素分布特征。
27、s43、根据体素分布特征对设备占据的体素进行分割,得到待解构零件。
28、s44、关联并更新待解构零件的表面体素和内部体素,得到待解构零件的体素属性。
29、s45、根据待解构零件更新初始化的待解构零件队列和树形层次结构,得到待解构零件队列以及树形层次结构。
30、可选地,步骤s5包括以下步骤s51-s55:
31、s51、根据待解构零件队列中的每个待解构零件关联的表面体素,创建并初始化候选分割面队列、无孔表面块队列和孤立表面队列。
32、s52、根据平面判定准则,从待解构零件队列的表面体素集合中筛选出平面体素,构建新平面;并根据新平面的孔体素属性,将新平面体素加入候选分割面队列或无孔表面块队列。
33、s53、根据连通性判定准则,从待解构零件队列剩余的表面体素中筛选出曲面体素,将曲面体素加入无孔表面块队列。
34、s54、根据孤立性判定准则,从待解构零件队列剩余的表面体素中筛选出孤立体素,将孤立体素加入孤立表面队列。
35、s55、根据孔隙率对候选分割面队列进行排序。
36、基于相同的技术构思,本技术还提供了一种基于点云数据的设备结构分割系统,包括:
37、获取模块,用于获取设备的点云数据;点云数据包含设备的表面点云数据和内部点云数据。
38、处理模块,用于通过主成分分析对点云数据体素化,得到体素化点云数据;根据体素化点云数据,标记设备占据的表面体素和内部体素;根据设备的体素标记对设备占据的体素进行分解,建立设备的待解构零件队列以及树形层次结构;根据待解构零件队列的表面体素分布特征,分别对各待解构零件的体素进行分割,得到各待解构零件对应的若干子零件体素队列;根据子零件体素队列更新树形层次结构。
39、可选地,处理模块具体用于对点云数据进行去中心化处理,得到去中心化点云数据;计算去中心化点云数据的协方差矩阵,得到中心化点云数据的特征向量和特征值;根据特征向量和特征值,构造线性变换矩阵,将点云数据从原三维坐标系转换至与主成分分析相对齐的空间下的新三维坐标系;对新三维坐标系下的点云数据进行体素化,得到体素化点云数据。
40、可选地,处理模块具体用于计算点云数据的几何中心;将点云数据从点坐标转换为相对于几何中心的偏移坐标,得到去中心化点云数据。
41、可选地,处理模块具体用于分别确认体素化点云数据在新三维坐标系的每个坐标轴上的最大值和最小值;根据每个坐标轴上的最大值和最小值,确定设备在新三维坐标系中所对应的最小长方体空间;在最小长方体空间逐一排除空体素并搜索设备表面所占的体素,得到设备占据的表面体素;将最小长方体空间内的剩余体素标记为内部体素。
42、可选地,处理模块具体用于创建初始化的待解构零件队列和树形层次结构;根据设备的体素标记,计算设备的体素分布特征;根据体素分布特征对设备占据的体素进行分割,得到待解构零件;关联并更新待解构零件的表面体素和内部体素,得到待解构零件的体素属性;根据待解构零件更新初始化的待解构零件队列和树形层次结构,得到待解构零件队列以及树形层次结构。
43、可选地,处理模块具体用于根据待解构零件队列中的每个待解构零件关联的表面体素,创建并初始化候选分割面队列、无孔表面块队列和孤立表面队列;根据平面判定准则,从待解构零件队列的表面体素集合中筛选出平面体素,构建新平面;并根据新平面的孔体素属性,将新平面体素加入候选分割面队列或无孔表面块队列;根据连通性判定准则,从待解构零件队列剩余的表面体素中筛选出曲面体素,将曲面体素加入无孔表面块队列;根据孤立性判定准则,从待解构零件队列剩余的表面体素中筛选出孤立体素,将孤立体素加入孤立表面队列;根据孔隙率对候选分割面队列进行排序。
44、基于相同的技术构思,本技术还提供了一种基于点云数据的设备结构分割存储介质,所述计算机可读指令被一个或多个处理器执行时,使得一个或多个处理器执行上述任一所述的基于点云数据的设备结构分割方法中的步骤。
45、本技术的有益效果:通过点云数据获得以设备几何中心为参照的表面体素和内部体素数据的空间分布特征,利用设备体素分布特征,自顶向下地将设备体素数据划分为具有多级层次结构关系的一组零件的集合,自适应地构建设备的多级零件层次结构关系,为数字孪生三维模型提供设备级、零件级、子零件级等任意层级的零件及其组合的灵活变更,同时也有助于变电设备模型的零件级局部更新、传输、存储和共享。
- 还没有人留言评论。精彩留言会获得点赞!