基于双边滤波和自适应阈值的Canny边缘检测方法与流程
本发明属于数字图像处理,具体涉及到一种基于双边滤波和自适应阈值的canny边缘检测方法。
背景技术:
1、在计算机视觉领域中,图像分割是进行目标检测与定位所必需的图像处理技术。常用的图像分割方法有二值化、边缘检测、聚类等,其中sobel、roberts、log等梯度检测算子在进行图像梯度检测时应用较为广泛。canny边缘检测算法,就是利用sobel算子进行梯度检测,是目前应用最为广泛的边缘检测算法。传统的canny边缘检测算法,主要分为高斯滤波、sobel梯度检测、非极大值抑制、滞后阈值处理和强弱边缘连接五个部分。
2、传统的canny边缘检测算法,为了保证边缘检测的精度,提出了三个边缘检测精度的评价标准。分别为:低错误率、边缘定位精度以及单一边缘响应,所以canny算法的边缘检测精度要高于prewitt算子、roberts算子和拉普拉斯算子等边缘检测算子。但是传统的canny边缘检测算法利用高斯滤波来对图像进行平滑处理,虽然利用高斯滤波对高斯噪声的干扰有着明显的抑制效果,但是高斯滤波不仅去了除图像中的高斯噪声,也会对图像边缘产生一定的模糊效果,影响边缘检测的定位精度。并且在传统canny边缘检测算法中,检测目标边缘,对目标边缘进行连接时,所选取的双阈值是人工操作选取的。为了选择合适的阈值往往需要经过多次尝试,浪费计算资源,而且检测出的目标边缘效果也不是十分理想。
3、传统的canny边缘检测算法利用高斯滤波进行降噪处理,虽然能有效的去除图像中的高斯噪声,但是会模糊图像的边缘,试图向丢失重要的边缘信息。在设定阈值进行对边缘像素点进行筛选的时候,传统的方法依靠经验来人工设定阈值,想要找到合适的阈值需要耗费大量的时间。
技术实现思路
1、本技术解决的技术问题是:克服现有技术的不足,提供了一种基于双边滤波和自适应阈值的canny边缘检测方法,解决了利用canny算法进行边缘检测的时候,检测精度无法满足要求的问题,并提升了边缘检测的准确性,提高图像边缘检测的效率。
2、为了提高canny算法的定位精度,节省计算资源,本文提出基于双边滤波和自适应阈值的canny边缘检测方法,采用双边滤波来代替高斯滤波对图像进行预处理,采用otsu算法进行自适应阈值选取,提高边缘检测质量,提升边缘检测精度。
3、本技术提供的技术方案如下:
4、基于双边滤波和自适应阈值的canny边缘检测方法,包括:
5、s1:基于原始图像建立平面坐标系,采用双边滤波算法去除原始图像的灰度图像噪声,得到平滑图像;
6、s2:通过一阶梯度算子计算平滑图像的图像梯度,得到平滑图像x轴和y轴方向的梯度矩阵,根据平滑图像x轴和y轴方向的梯度矩阵,获得平滑图像的梯度强度矩阵gxy和梯度方向
7、s3:根据梯度强度矩阵gxy,获得平滑图像每一个像素点的灰度梯度强度,对平滑图像每一个像素点处的灰度梯度强度进行非极大值抑制,获得多个预边缘像素点;
8、s4:利用otsu算法进行自适应高低阈值计算,将计算出的阈值作为高阈值,高阈值的1/5-1/2作为低阈值;根据高阈值和低阈值对保留的预边缘像素点进行比较和筛选,获得强边缘像素点和弱边缘像素点;
9、s5:对弱像素边缘点进行筛选,抑制需要去除的弱边缘像素点,强边缘像素点和保留的弱边缘像素点为真实边缘像素点,连接真实边缘像素点,获得目标边缘曲线。
10、所述步骤s1中,采用双边滤波算法去除原始图像的灰度图像噪声,得到平滑图像,包括:
11、
12、
13、
14、
15、其中,f(x,y)为平滑图像中的像素点,ωs为空间相似度的权重,ωr为灰度相似度的权重,ωp为归一化权重,,i(i,j)为原始图像中的像素点,i(x,y)为原始图像,σs为空间相似度权重ωs的权重系数,σr为灰度相似度权重ωr的权重系数。
16、所述步骤s2中,通过一阶梯度算子计算平滑图像的图像梯度,得到平滑图像x轴和y轴方向的梯度矩阵,包括:
17、sobel算子在x方向的矩阵为sx,在y方向的矩阵为sy,原始图像x方向的梯度矩阵记为gx,原始图像在y方向的梯度矩阵记为gy,
18、gx=sx*i
19、gy=sy*i
20、其中,i为平滑图像的灰度矩阵,*表示互相关运算;规定沿x轴方向从左到右为正方向,沿y轴方向从上到下为正方向。
21、所述步骤s2中,根据平滑图像x轴和y轴方向的梯度矩阵,获得平滑图像的梯度强度矩阵gxy和梯度方向包括,平滑图像的梯度强度矩阵gxy和梯度方向为,
22、
23、
24、其中,gx(i,j)为像素点(i,j)在x轴方向的梯度矩阵,gy(i,j)为像素点(i,j)在y轴方向的梯度矩阵。
25、所述步骤s3中,对平滑图像每一个像素点处的灰度梯度强度进行非极大值抑制,获得多个预边缘像素点,包括,将平滑图像的一个像素点作为当前像素点,将当前像素点的灰度梯度强度与沿着当前像素点梯度方向的正反梯度方向上临近像素点的灰度梯度强度进行比较,若灰度梯度强度低于临近像素点的灰度梯度强度,舍去该当前像素点,若灰度梯度强度高于临近像素点的灰度梯度强度,保留当前像素点作为预边缘像素点;遍历平滑图像的每一个像素点,获得多个预边缘像素点。
26、所述步骤s3中,对平滑图像每一个像素点处的灰度梯度强度进行非极大值抑制,获得多个预边缘像素点,通过在沿着梯度方向分布的两个相邻像素点之间采用线性插值法来进行比较,具体包括:
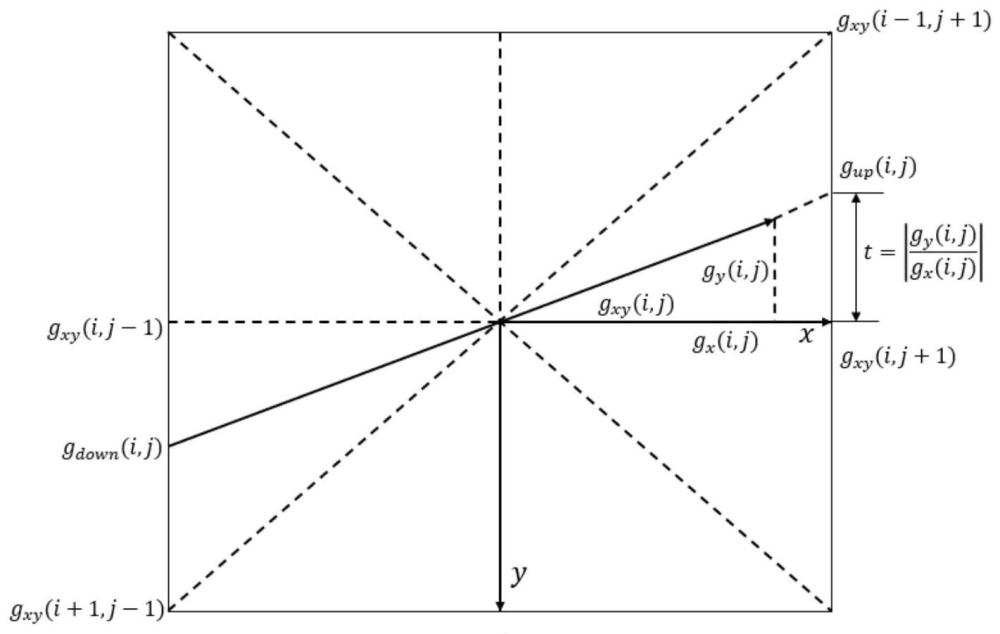
27、以过当前像素点的梯度方向、逆梯度方向、x方向和y方向将当前像素点及沿着梯度方向分布的相邻像素点所在区域分为8部分,假设当前像素点沿着x方向的灰度梯度强度为gx(i,j),沿着y方向的灰度梯度强度为gy(i,j),合梯度强度为gxy(i,j);根据gx(i,j)和gy(i,j)的正负和大小判断出当前像素点梯度方向所处区域;对当前像素点和合梯度强度方向上的正反梯度方向上相邻像素点进行线性插值,获得正反方向上的比较梯度强度gup(i,j)和gdown(i,j),
28、gup(i.j)=(1-t)·gxy(i.j+1)+t·gxy(i-1.j+1)
29、gdown(i.j)=(1-t)·gxy(i.j-1)+t·gxy(i+1.j-1)
30、t为当前像素点灰度梯度方向的正切值,gxy(i,j+1)为像素点(i,j+1)处的灰度梯度强度;gxy(i-1,j+1)为为像素点(i-1,j+1)处的灰度梯度强度;gxy(i,j-1)为像素点(i,j-1)处的灰度梯度强度;gxy(i+1.j-1)为为像素点(i+1,j-1)处的灰度梯度强度;
31、当gup(i,j)=gdown(i,j)=0时,该像素点无灰度梯度,舍去该当前像素点。
32、所述
33、所述步骤s4中,根据高阈值和低阈值对保留的预边缘像素点进行比较和筛选,获得强边缘像素点和弱边缘像素点,包括,如果预边缘像素点的灰度梯度强度低于低阈值,则将该预边缘像素点去除;如果预边缘像素点的灰度梯度强度高于高阈值,则保留该预边缘像素点为作为强边缘像素点;如果预边缘像素点的灰度梯度强度高于低阈值低于高阈值,则标记该预边缘像素点为弱边缘像素点。
34、所述步骤s5中,抑制需要去除的弱边缘像素点,包括,对比弱边缘像素点与其周围8个区域的相邻像素点,来判断该弱边缘像素点是否可以作为边缘像素点,如果弱边缘像素点周围的8个区域内存在一个相邻像素点为强边缘像素点,那该弱边缘像素点保留;如果弱边缘像素点周围的8个区域内不存在任何一个相邻像素点为强边缘像素点,那么该弱边缘像素点则不能被保留。
35、与传统的canny边缘检测算法相比,本发明采用双边滤波算法代替高斯滤波算法,可以在去除噪声干扰的同时,很好的保留图像中的边缘特征。同时利用otsu算法进行自适应阈值选取,提升了边缘检测方法的稳定性、减少了断裂边缘的产生并且提高了边缘轮廓的精度,获得的边缘曲线更加精细准确。
36、综上所述,本技术至少包括以下有益技术效果:
37、本发明为了提高canny算法的定位精度,节省计算资源,采用双边滤波来代替高斯滤波对图像进行预处理,采用otsu算法进行自适应阈值选取。改进的算法检测出的边缘曲线轮廓更精细,弱边缘像素点更少,非边缘像素点去除的也更加干净,提高了边缘检测质量以及检测效率。
38、与传统的canny边缘检测算法相比,本发明采用双边滤波算法代替高斯滤波算法,可以在去除噪声干扰的同时,很好的保留图像中的边缘特征。同时利用otsu算法进行自适应阈值选取,提升了边缘检测算法的稳定性、减少了断裂边缘的产生并且提高了边缘轮廓的精度,获得的边缘曲线更加精细准确。为后续的目标检测与定位工作奠定了基础。
- 还没有人留言评论。精彩留言会获得点赞!