粉末冶金低压涡轮叶片毛坯的自适应机加工余量分配方法
本发明涉及粉末冶金制造,具体涉及一种粉末冶金低压涡轮叶片毛坯的自适应机加工余量分配方法。
背景技术:
1、低压涡轮叶片是航空发动机的核心部件,而采用粉末冶金生产的低压涡轮叶片需要经过制粉、混料、成形、烧结、后处理、精密加工等流程,导致制造的低压涡轮叶片变形量大,且无精确的基准,基准偏差大会造成毛坯件在加工过程中由于局部余量不足而报废,影响制造质量和良品率,因此,在对粉末冶金毛坯进行加工前获得较为均匀的加工余量十分必要。
2、由于粉末冶金毛坯变形量大且较为随机,难以准确预测毛坯实形,因此需要根据每个毛坯的轮廓分布进行自适应的加工余量调整,才能够最大化利用已有毛坯,避免因基准问题造成大批量的毛坯件报废。在自适应余量优化过程中,对毛坯件轮廓的三维检测至关重要。三维激光扫描技术具有非接触性、快速性、操作便捷、数据精度高等特点,被广泛应用于工程检测领域。然而,通过三维激光扫描获得的点云数据量较大,且存在着大量的冗余数据点,对后期的处理造成了很大的挑战,如何基于稠密的三维点云通过余量分配优化获得较为精准的毛坯加工基准依然是尚未解决的难题。
3、因此,需要提供一种粉末冶金低压涡轮叶片毛坯的自适应机加工余量分配方法以解决上述问题。
技术实现思路
1、本发明提供一种粉末冶金低压涡轮叶片毛坯的自适应机加工余量分配方法,通过获取点云、理论模型的截面轮廓对应的截面中弧线,沿截面中弧线选取点云的数据点和理论模型的数据点,并利用icp算法对数据点对进行优化得到最终数据点对,从而减少点云中的数据量,从而少量的最终数据点对得到点云和理论模型之间的最终位置对应关系,根据点云和理论模型之间的最终位置对应关系,以及预设的粗加工基准面位置,确定切割平面,根据涡轮叶片毛坯的各顶角到切割平面的距离,对涡轮叶片毛坯的机加工余量进行分配,以解决现有的通过三维激光扫描获得的点云数据量较大,且存在着大量的冗余数据点,对后期的处理造成了很大的挑战,如何基于稠密的三维点云获得较为精准的毛坯加工基准依然是尚未解决的问题。
2、本发明的一种粉末冶金低压涡轮叶片毛坯的自适应机加工余量分配方法采用如下技术方案:包括:
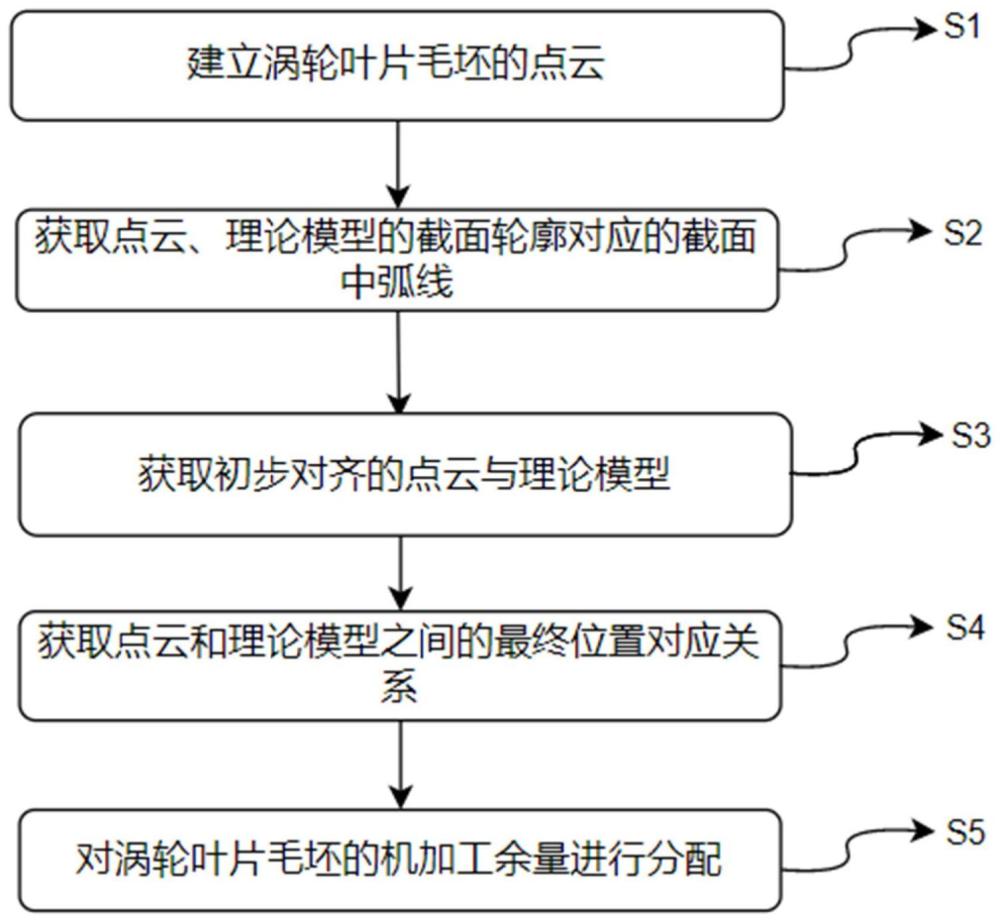
3、获取涡轮叶片毛坯的原始点云数据,并根据原始点云数据建立涡轮叶片毛坯的点云;
4、分别获取涡轮叶片毛坯的点云和涡轮叶片的理论模型对应的叶盆曲线和叶背曲线,根据叶盆曲线、叶背曲线获取点云、理论模型的截面轮廓对应的截面中弧线;
5、将每个截面中弧线上涡轮叶片最厚处的点作为基准特征点,在每个截面中弧线对应的基准特征点的两侧以相同弧长间隔,沿截面中弧线选取多个特征点,得到点云的特征点和理论模型的特征点,将点云对应的特征点与理论模型对应的特征点进行一一匹配,得到初步对齐的点云与理论模型;
6、将初步对齐的点云对应的数据点与理论模型对应的数据点进行一一匹配,得到数据点对,采用icp算法对数据点对进行优化得到最终数据点对,根据最终数据点对获取点云和理论模型之间的最终位置对应关系;
7、根据点云和理论模型之间的最终位置对应关系,以及预设的粗加工基准面位置,确定涡轮叶片毛坯的切割平面;根据涡轮叶片毛坯的各顶角到切割平面的距离,对涡轮叶片毛坯的机加工余量进行分配。
8、优选的,建立涡轮叶片毛坯的点云的步骤为:
9、根据原始点云数据建立初始点云;
10、将初始点云中各点及其所有近邻点进行二次曲面拟合,根据拟合结果获取点云中各点的曲率值以及信息熵;
11、对初始点云中的点进行聚类得到多个聚类簇,根据每个聚类簇中所有点的平均信息熵、平均曲率值,将曲率值以及信息熵均高于所在的聚类簇的平均信息熵、平均曲率值的点作为目标点,去除所有目标点和拟合结果的边缘点得到点云。
12、优选的,采用icp算法对数据点对进行优化得到最终数据点对的步骤为:
13、根据理论模型和点云中对应的数据点对,获得变换矩阵;
14、将点云中在叶身部分对应的数据点作为目标数据点,寻找点云中各目标数据点与理论模型中距离最近的数据点作为理论模型中匹配的目标数据点,并建立目标数据点对;
15、根据每个目标数据点对中的两个目标数据点的距离,赋予点云与理论模型中对应的目标数据点构成的目标数据点对的权值;
16、采用icp算法,根据变换矩阵对点云进行位置变换,使得目标数据点对之间的加权距离最短,并得到新的目标数据点对;
17、计算新的目标数据点对的距离和权值,直至达到最大迭代次数或连续两次迭代的距离小于预设的距离阈值,得到最终变换矩阵;
18、根据最终变换矩阵得到最终目标数据点对。
19、优选的,获取点云中每个目标数据点对的权值的计算公式为:
20、
21、式中,λi为第i个目标数据点对的权值;
22、dm为所有目标数据点对中的最大距离;
23、dm为所有目标数据点对中的最小距离;
24、di为第i个目标数据点对的距离。
25、优选的,获取点云、理论模型的截面轮廓对应的截面中弧线的步骤包括:
26、对点云对应的叶盆曲线和叶背曲线进行三次b样条拟合,并对拟合后的曲线进行样条插值细化数据点,得到叶盆曲线上每个数据点到叶背曲线上都有对应数据点;
27、获取点云中叶盆曲线和叶背曲线上距离最短的两个对应数据点,以及两个对应数据点之间的连线中点;
28、遍历点云中所有对应数据点的连线中点,并连接所有连线中点得到点云的截面轮廓对应的截面中弧线;
29、对理论模型对应的叶盆曲线和叶背曲线进行三次b样条拟合,并对拟合后的曲线进行样条插值细化数据点,得到叶盆曲线上每个数据点到叶背曲线上都有对应数据点;
30、获取理论模型中叶盆曲线和叶背曲线上距离最短的两个对应数据点,以及两个对应数据点之间的连线中点;
31、遍历理论模型中所有对应数据点的连线中点,并连接所有连线中点得到理论模型的截面轮廓对应的截面中弧线。
32、优选的,分别获取涡轮叶片毛坯的点云和理论模型对应的叶盆曲线和叶背曲线的步骤为:
33、获得第一截面轮廓和第二截面轮廓对应的前缘、尾缘最外点;
34、获取涡轮叶片的理论模型对应的第一截面轮廓;
35、裁剪去第一截面轮廓距离前缘的最外点、尾缘的最外点的预设的第一距离以内的数据点,得到涡轮叶片的叶盆曲线和叶背曲线;
36、获取涡轮叶片毛坯的点云对应的第二截面轮廓;
37、裁剪去第二截面轮廓距离前缘的最外点、尾缘的最外点的预设的第二距离以内的数据点,得到点云的叶盆曲线和叶背曲线。
38、优选的,第一距离的取值范围为[0.5,4]mm;第一距离的取值范围为[6,10]mm。
39、优选的,获取点云中各点的信息熵的步骤为:
40、获取点云中各点距其每个近邻点重心的距离;
41、获取点云中各点距其所有近邻点的平均距离;
42、根据点云中各点距其每个近邻点重心的距离、各点距其所有近邻点的平均距离以及各点的曲率值,获取各点的信息熵。
43、优选的,信息熵的计算公式为:
44、定义h、s、1/a三者的乘积为权值积ω,即
45、
46、
47、
48、即得到各点的信息熵i(p)为:
49、
50、式中,i(p)表示点云中第p个点的信息熵;
51、s表示初始点云中第p个点距其所有近邻点重心的距离;
52、h表示进行二次曲面拟合后初始点云中第p个点对应的曲率值;
53、a表示初始点云中第p个点到其所有近邻点的平均距离;
54、pωi表示初始点云中第p个点对应的所有近邻点中的第i个近邻点的权值积概率;
55、pω表示初始点云中第p个点的权值积概率;
56、ωi表示初始点云中第p个点对应的所有近邻点中的第i个近邻点的权值积;
57、ω表示初始点云中第p个点的权值积。
58、k表示初始点云中第p个点的所有近邻点的数量。
59、优选的,获取初始点云中各点的所有近邻点的步骤为:
60、通过对初始点云建立kd-树,基于kd-树采用k邻近算法计算初始点云中各点的近邻点。
61、本发明的有益效果是:
62、通过获取点云、理论模型的截面轮廓对应的截面中弧线,沿截面中弧线选取点云的特征点和理论模型的特征点,从而减少点云中与理论模型匹配时数据量和计算量,然后将点云对应的特征点与理论模型对应的特征点进行一一匹配,得到初步对齐的点云与理论模型,并利用icp算法对数据点对进行优化得到最终数据点对,从而通过最终数据点对得到点云和理论模型之间的最终位置对应关系,根据点云和理论模型之间的最终位置对应关系,以及预设的粗加工基准面位置,确定切割平面,根据涡轮叶片毛坯的各顶角到切割平面的距离,对涡轮叶片毛坯的机加工余量进行分配,即本发明分配余量过程中根据数据点匹配的方式得到点云和理论模型之间的精确最终位置对应关系,然后依据理论模型对涡轮叶片毛坯进行加工余量分配,从而提高加工精度。
63、其次,通过根据原始点云数据建立初始点云;将初始点云中各点及其所有近邻点进行二次曲面拟合,根据拟合结果获取点云中各点的曲率值以及信息熵;对初始点云中的点进行聚类得到多个聚类簇,根据每个聚类簇中所有点的平均信息熵、平均曲率值,将曲率值以及信息熵均高于所在的聚类簇的平均信息熵、平均曲率值的点作为目标点,去除所有目标点和拟合结果的边缘点得到点云,即利用点云中数据的曲率、信息熵以及边缘点对点云中数据进行简化,以减少后续运算时的计算量,从而提高后续运算的运算效率。
- 还没有人留言评论。精彩留言会获得点赞!