一种针对异构无人集群的杀伤网动态生成方法
本发明属于无人集群装备组合方法,特别涉及一种针对异构无人集群的杀伤网动态生成方法。
背景技术:
1、杀伤链分为六个环节:发现(find)、定位(fix)、跟踪(track)、瞄准(target)、交战(engage)和评估(assess)。每一个环节之间互相联系,组成有规律的作战链路,即f2t2ea。
2、杀伤链的生效模式是由侦察节点组成的传感器网络向指挥控制网络传递敌方信息,然后指挥控制网络通过打击节点摧毁敌方目标。因为一次作战的目的往往是摧毁敌方的某一关键节点,以决策为中心的杀伤链已成为未来作战的核心,是整合作战能力和实现精准打击的核心。
3、近些年来,随着计算机算力的提高,杀伤链的种类也越来越丰富。除了最早的独立杀伤链,还出现了把高性能的己方节点作为链条中枢的“节点辐射”型杀伤链,和将多个拥有共享节点的独立杀伤链合并的“网状”杀伤链(即杀伤网)。
4、目前,杀伤网构建主要基于规则或计算,使用遗传算法解决杀伤网装备组合问题的算法往往存在构建速度慢,构建质量低的问题,并缺少对动态生成方法和“异构无人集群”这一作战平台的研究。
技术实现思路
1、针对现有技术中的不足,本发明提出一种针对异构无人集群的杀伤网动态生成方法。
2、本发明的技术方案具体如下:
3、一种针对异构无人集群的杀伤网动态生成方法,包括以下步骤:
4、步骤s1、选取杀伤网评估指标,以反应红蓝双方装备能力关系;
5、所述杀伤网评估指标包括:冗余性指标、风险性指标、灵敏性指标和网络熵指标;
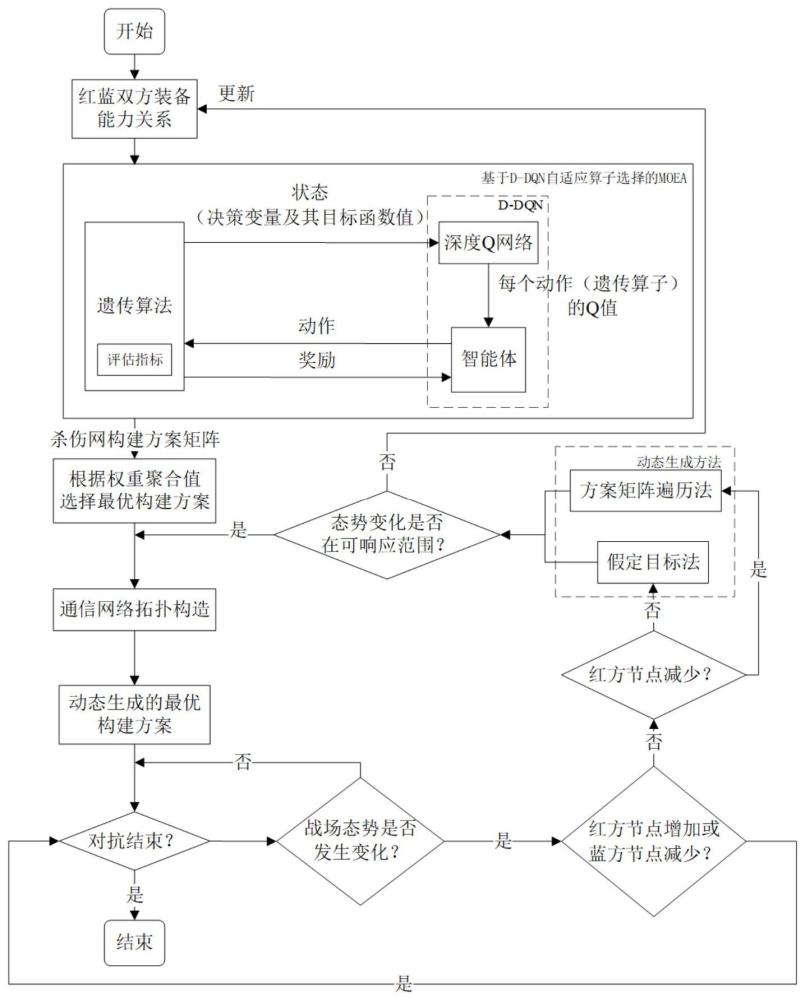
6、步骤s2、基于d-dqn自适应算子选择的moea;
7、以nsga-ii(第二代非支配排序遗传算法)的流程为框架,在算子候选集中,d-dqn网络在遗传算法需要生成后代时根据父代信息自适应的选择合适的遗传算子,解决异构无人集群杀伤网构建的多目标优化问题,获得多个最优解方案;
8、步骤s3、根据权重聚合值选择最优杀伤网构建方案;
9、将多个最优解方案的杀伤网评估指标值进行加权平均得到权重聚合值,以此对多个最优解方案进行排序,从中选择最优方案;
10、步骤s4、构造通信网络拓扑结构;
11、先使用深度优先搜索(dfs)算法将多连通图分解为一系列独立的连通图,然后对每个连通图使用prim方法进行网络拓扑构造;
12、步骤s5、对杀伤网进行动态更新;
13、根据战场态势是否发生变化,决定是否对杀伤网进行动态更新。
14、步骤s6、判断战场态势变化是否在可响应范围内,即多个最优解方案中是否有可行解,若是则返回步骤s4,若否则返回步骤s1。
15、优选的,所述步骤s1中,所述冗余性指标为所有蓝方节点可形成杀伤链数量的平均值;所述风险性指标为各红方节点被摧毁后失去的杀伤链数量占原有数量的比例;所述灵敏性指标为杀伤网中指挥节点调用其他层节点的数量;所述网络熵指标为通信网络的网络熵。
16、优选的,所述步骤s2中,将红方节点和杀伤网评估指标作为状态,进化过程中的遗传算子选择作为动作,神经网络学习到的q值作为遗传算子选择的依据,并定义信用分配策略、算子候选集和自适应算子选择策略。
17、优选的,所述步骤s5具体包括:
18、根据红方节点和蓝方节点的变化情况,对杀伤网进行动态更新:
19、(1)当红方节点增加或蓝方节点减少时,则维持原杀伤网不变;
20、(2)当红方节点减少时,则从性能最优到最劣遍历步骤s2所得的多个最优解,直到其包含的所有节点都可使用为止;
21、(3)当蓝方节点增加时,若增加的节点与现存蓝方某个节点属于同一大类,则采取接力序贯打击策略,即摧毁前一节点后立即摧毁增加的同类蓝方节点;若增加的蓝方节点与现存所有蓝方节点都不属于同一大类,即为新的目标大类,则指派待命冗余杀伤链生效,完成对增加蓝方节点的打击。
22、优选的,所述步骤s2中,
23、所述信用分配策略即为确定强化学习中的奖励策略,采用切比雪夫方法作为聚合函数,其中,目标函数值为个体的各个目标与其目标参考值的加权距离的最大值,如式(8)。
24、
25、式中,x表示决策变量,w是目标函数被分配的权重,z*是参考点,m是目标函数的个数,wc是第c个目标函数被分配的权重,fc(x)代表第c个目标函数的函数值;
26、子代的奖励值如式(9)所示:
27、
28、式中,y代表生成子代x的父代的决策变量。
29、优选的,所述步骤s2中,
30、所述算子候选集中选用的遗传算子为模拟二元交叉算子、交叉算子、第一差分进化算子或第二进化差分算子,并对生成子代解进行多项式变异;
31、a)模拟二元交叉算子,如式(10):
32、
33、其中,d=1,...,d,x=(x1,...,xd,...,xd)是子代解,是两个父代,并且:
34、
35、其中,μ是在[0,1]中采样的均匀分布随机值,η是预定义参数。
36、
37、b)交叉算子,如式(12):
38、
39、其中r1、r2是在[0,1]中采样的均匀分布随机值,gen是当前世代数,maxgen是最大世代数。
40、c)第一差分进化算子,其中de/rand/1定义如式(13):
41、
42、是第i个父代,f和cr分别是预设的常数,r是在[0,1]中采样的均匀分布随机值。
43、d)第二差分进化算子,de/rand/2定义如式(14):
44、
45、其中f、cr是预定义参数,r是在[0,1]中采样的均匀分布随机值。
46、一旦生成子代解,就执行多项式变异,如式(15)、式(16):
47、xd=xd+(ud-ld)δ (15)
48、
49、其中,ud和ld分别是决策变量的上下界,可分别取值1和0,μ是在[0,1]中采样的均匀分布随机值,η是预定义参数。
50、相比于现有技术,本发明的有益效果在于:
51、1.本发明将d-dqn与moea融合,用于解决杀伤网构建中的mop,该方法在效率和性能上都具有一定的优势。基于d-dqn自适应算子选择的moea经过训练后可以针对用户指定的杀伤网评估指标权重和每个父代解的特征,选择其最适合的遗传算子,以生成平均权重聚合值和适应度改进更大的子代,从而在相同的时间成本下得到更好、更适合用户需求的异构无人集群杀伤网构建方案。
52、2.本发明提出了一种对杀伤网进行动态更新的方法,即“方案矩阵遍历法”和“假定目标法”。使用本发明提出的动态生成方法,从而可以根据战场形势变化动态响应,实时生成新的杀伤网构建方案。
53、3.本发明针对所得最优方案的通信网不一定是一整个连通图的问题,进一步提出了多连通图prim构建最小生成树方法,解决杀伤网中的通信网络拓扑构造问题。
- 还没有人留言评论。精彩留言会获得点赞!