一种智慧货运物流管理系统及方法与流程
本发明涉及无人物流车货运管理领域,更具体地说,它涉及一种智慧货运物流管理系统及方法。
背景技术:
1、近年来,随着能源价格不断上涨和人工智能的快速发展,电动无人车在城市物流配送环节逐渐成为传统内燃机汽车的替代品,无人物流车因为其应用人工量较少且节约人力,尤其是在配送距离较短,人工配送会造成成本增加,所以无人物流车逐渐成为主流,且随着智慧城市的打造和铺设,无人物流车的兴起为智慧城市的基础建设添砖加瓦。
2、但电动无人车在实际配送过程中,由于无人物流车是由智能控制,在面临路面障碍和路面变道时不能进行人工精细调节,容易出现配送事故的情况,面临行驶速度难以调节和遇见路障反应不及时等问题。此外,在无人物流车配送过程中,由于一次会对多个位置进行配送,如果不进行路线规划,直接进行随机配送,不仅会增加配送的时间,而且会增加配送的距离,导致配送效率降低因此,研究电动车辆的路径规划和行驶状态控制,对于推广电动无人车进行物流配送具有重要的现实意义。
3、专利号为cn209949510u的发明公开了了一种无人物流车控制系统,无人物流车控制系统包括无人物流车和远程终端软件,所述无人物流车包括bcm、vcu和ucu;所述远程终端软件用于将上电指令发送至ucu;所述ucu用于接收上电指令,并将所述上电指令发送至bcm;所述bcm用于接收所述ucu发送的上电指令,并确定所述上电指令对应的泊车上电模式,将所述泊车上电模式发送至vcu;所述vcu用于接收所述bcm发送的泊车上电模式,并根据所述泊车上电模式进行上电操作,该设计涉及了对无人物流车上下电的智能控制,但对于无人物流车的行驶过程却未曾涉及,因此,基于上述问题,本发明对无人物流车的配送过程进行设计。
技术实现思路
1、针对现有技术存在的无人物流车路线规划不合理和行驶状态控制有限的问题,本发明的目的在于提供一种智慧货运物流管理系统及方法,实现无人物流车在配送过程中的路线规划和行驶状态控制。
2、为实现上述目的,本发明提供了如下技术方案:
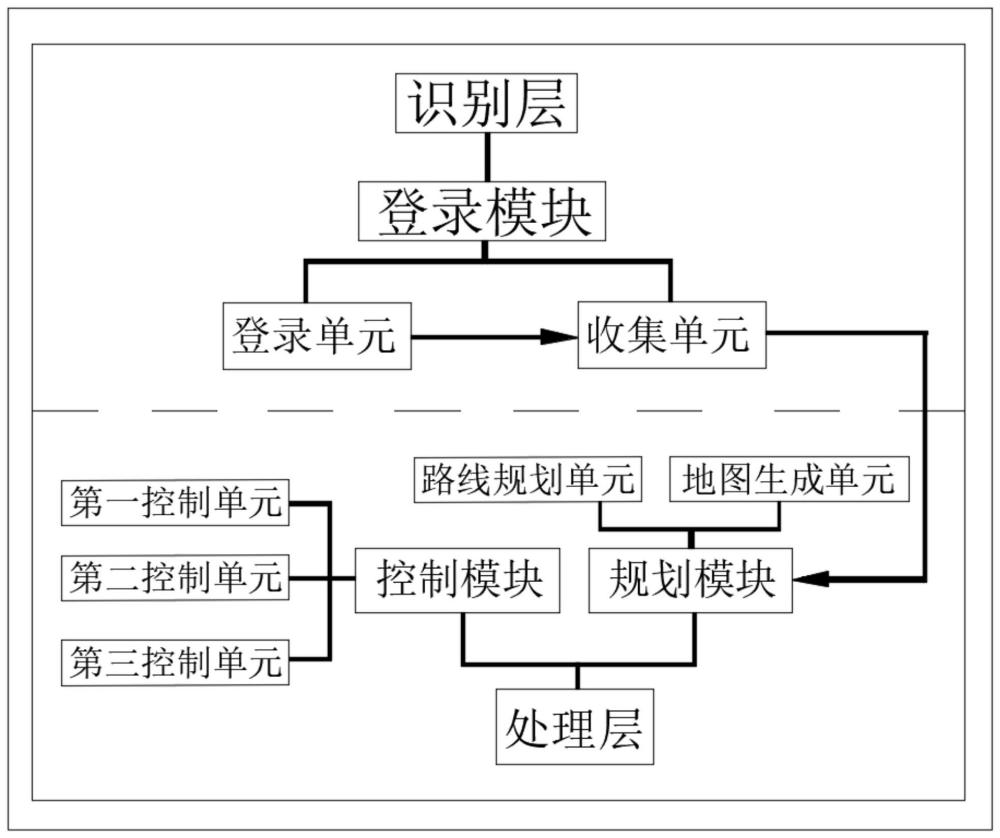
3、一种智慧货运物流管理系统,所述智慧货运物流管理系统包括识别层和处理层:
4、识别层包括登录模块,用户通过登录模块与处理层进行信息交换和输送;
5、处理层包括规划模块和控制模块,规划模块通过路线规划单元对可通行路径进行挑选,路线规划单元基于第一选择公式和第二选择公式对最短的可通行路径进行依次挑选,根据仓库到配送点的最短可通行路径进行配送点选定、并根据选定的配送点按照最短可通行路径选定下一个配送点,依次重复,将多个配送点按照选定顺序进行送货次序确定,进而形成送货的最佳路径;
6、控制模块用于配送过程中无人物流车行驶状态的控制,控制模块包括第一控制单元、第二控制单元和第三控制单元,第一控制单元用于控制无人物流车在正常行驶状态下的速度,第二控制单元用于控制无人物流车在减速状态下的行驶速度,第三控制单元用于控制无人物流车在转弯下的行驶状态。
7、优选的,所述识别层包括登录模块,登录模块包括登录单元和收集单元,登录单元基于java中的单点登录sso技术对用户进行身份验证,收集单元基于python技术对登录单元中用户输入的订单信息进行收集,登录模块的具体工作过程如下:
8、步骤s21:用户通过登录单元进入处理层,处理层与数据库和登录模块连接,登录单元对发出登录请求的用户进行权限信息识别,通过判断用户的验证信息是否与数据库内部留存的注册信息相匹配,进而识别用户是否具有登录权限:若用户的登入信息与数据库的信息相匹配,表示用户安全且具有登录权限,则允许登入;
9、若用户登录信息与数据库的信息不匹配,表示用户不具有登录权限,则拒绝用户登入并进行相关提示,提示包括但不限于验证信息重新输入和未注册提醒;
10、步骤s22:用户通过登录单元对订单进行提交,收集单元对用户提交订单信息中的物品信息、用户信息、期望到达时间和位置信息以及其他相关信息进行收集,并将收集到的信息进行封装成数据包,然后数据包传输给处理层;
11、步骤s23:无人物流车将物品配送到配送点时,通过登录单元进行消息提醒,提示用户进行物品接收,并在用户完成物品验收后进行物品验收信息录入,在登录单元上显示订单已完成信息显示。
12、优选的,所述处理层包括规划模块,规划模块基于matlab的prm算法和gps定位装置对路径规划设计,用于规划物流配送到各个用户的先后顺序和输送路径,规划模块包括地图生成单元和路线规划单元,规划模块的具体工作过程如下:
13、步骤s31:地图生成单元从数据库中获取配送区域,并根据prm算法中的碰撞检测生成二维仿真地图,地图具备空白线条、黑色区域、红色点块和绿色点块,空白线条表示可通行路径,黑色区域表示禁止通行路障,红色点块表示用户提交的配送点,绿色点块表示储存物品的仓库,从仓库到达配送点的路径不止一条;
14、其中,可通行路径包括仓库到达配送点的路径和各个配送点之间的路径;
15、步骤s32:路线规划单元基于测量器对地图中可通行路径进行测量,通过对物流配送最短可通行路径的依次选择形成送货的最佳路径,最佳路径的行驶次序为仓库到配送点、配送点到配送点、配送点到仓库。
16、优选的,所述步骤s32中的路线规划单元根据选择公式对最短的可通行路径进行选择,进而形成送货的最佳路径,其工作过程具体包括以下步骤:
17、步骤s321:设定最短的可通行路径选择公式,选择公式类型包括仓库到配送点和配送点到配送点,
18、设定仓库到配送点为第一选择公式,配送点到配送点为第二选择公式,
19、第一选择公式为
20、
21、第二选择公式为
22、
23、式中,j≤i≤k中i为配送点p的标号,j为配送点p的标号的起始数值,k为配送点p的标号的终止数值,表示标号为i配送点p到达仓库c的可通行路径长度,设定配送点的数量为n个,且n<j,表示标号为g的配送点p为第一配送次序,表示标号为f的配送点p为第t配送次序,min()表示最小值选择输出函数,exc(pg)表示除了标号g配送点p之外的其他标号;
24、步骤s321:根据第一选择公式选出距离仓库最近的配送点为第一次序配送,即根据第二选择公式以第一次序配送的配送点标号为起始点选择第二个配送点,根据第二选择公式对配送点进行依次选择和输出,直到只剩最后一个配送点为止,再次进入第一选择公式,选择出最后一个配送点与仓库的最短可通行路径;
25、步骤s321:根据各个配送点被选择出来的次序,对配送点依次进行物品配送。
26、通过地图生成单元生成配送区域的二维仿真地图,进而为路线规划单元对送货最佳路径的形成提供详实可靠的数据支持,路线规划单元根据第一选择公式选择出送货的最佳路径起始点和终止点的可通行路径确定,路线规划单元根据第二选择公式选择出无人物流车配送过程中,从配送点到配送点最短的可通行路径,进行对配送过程中各个物流点间配送前后次序的依次确定,为物流车的配送过程提供配送效率较高的送货路线,实现送货的最佳路径规划。
27、优选的,所述处理层包括控制模块,控制模块用于配送过程中无人物流车行驶状态的控制,控制模块包括第一控制单元,第一控制单元用于控制无人物流车在正常行驶状态下的速度,正常行驶状态包括无人物流车前行方向上10米无障碍阻拦,且可以通行时的场景,根据速度公式:
28、
29、获取无人物流车在正常行驶状态下的行驶速度;
30、式中,v为正常行驶时的行驶速度,ve为无人物流车输出的额定速度,ε为10米路段颠簸值dp的占比系数,为货物易损值se的占比系数。
31、第一控制单元通过速度公式控制无人物流车在正常行驶状态下的速度,实现无人物流车在道路畅通情况下的正常行驶速度调控。
32、优选的,所述无人物流车的车体结构由两个驱动轮和两个转向轮组成,每个驱动轮和转向轮上都安装于震感仪,震感仪根据驱动轮和转向轮的颠簸受震情况生成震感波动曲线图,每个曲线图都代表一个车轮所受的震动情况,根据震动公式:
33、
34、获取两个驱动轮和两个转向轮整体的颠簸值dp;
35、式中:n为轮子标号,m为轮子数量,f(x)为每个车轮震动波动时形成的曲线函数,g(x)为车轮正常震感下所形成的标准曲线函数。
36、优选的,所述控制模块包括第二控制单元,第二控制单元用于控制无人物流车在识别前行方向10米内有障碍阻拦状态下的行驶速度,有障碍阻拦状态包括无人物流车上设置的传感设备和影响设备识别到无人物流车在前行方向上10米内,有障碍阻拦导致无法以正常行驶时的行驶速度前行,无人物流车进行减速,根据减速公式:
37、
38、获取无人物流车在减速过程中的行驶速度;
39、式中,vf为正常行驶时的行驶速度,ae为无人物流车输出的加速度。
40、第二控制单元通过减速公式控制无人物流车在识别前行方向10米内有障碍阻拦状态下的行驶速度,实现无人物流车在有障碍阻拦导致无法以正常行驶时的速度控制,且当阻碍消失时,无人物流车通过加速到正常行驶速度进行继续前行。
41、优选的,所述控制模块包括第三控制单元,第三控制单元用于控制无人物流车在识别前行方向10米内一侧有障碍阻拦下的行驶状态,无人物流车外出周围车身上均设置有传感设备和影响设备,当感知到车身一侧有障碍且另一侧无障碍或者路径转弯时,会执行转弯状态下的行驶,无人物流车前轮和后轮转向角度不同,后轮为驱动轮且前轮为转向轮,通过转弯半径和车辆的轴距、前后轮之间的距离参数描述无人物流车转弯过程,转弯过程根据转弯公式:
42、
43、
44、获取无人物流车在转弯过程中转向轮的工作状态,
45、式中:δ为无人物流车前轮的转向角,β为车身前进方向与前轮转向角度之间的夹角,r为车身转弯半径,l为无人物流车的轴距,w为无人物流车前轮和后轮之间的轴距。
46、第三控制单元通过转弯公式控制无人物流车在识别前行方向10米内一侧有障碍阻拦下的行驶状态,实现无人物流车在转弯时的速度控制。
47、优选的,无人物流车通过物联网与计算机连接,控制模块基于计算机中ros控制对无人物流车行驶过程中进行状态控制,ros控制主要包括ros主控制器和ros底层控制器,ros主控制器基于gps实现无人物流车的路径规划与导航、行驶状态模型构建以及控制命令的接收与输出,行驶状态模型构建基于速度公式、减速公式和转弯公式,ros底层控制器基于传感设备和影响设备对无人物流车周围和自身的状态参数进行采集,根据ros主控制器下发的控制指令驱动直流电机或伺服电机控制驱动轮和转向轮工作。
48、优选的,所述智慧货运物流管理方法应用于无人物流车、客户端和云平台,无人物流车和客户端通过物联网与云平台连接,处理层基于云平台对无人物流车进行配送过程的状态控制,用户通过客户端的登录单元进行物品订单信息的提交,并将订单信息上传给云平台,云平台对多个订单信息进行收集,并提取用户位置形成配送点,云平台中的路线规划模块基于matlab的prm算法对配送路径进行规划设计,形成送货的最佳路径,即为无人物流车物品配送的路线图,无人物流车根据路线图进行货物配送过程中,其行驶状态由控制模块进行调控,当无人物流车将物品配送给用户时,传输信号给云平台,云平台在登录单元和客户端上进行信息显示。
49、与现有技术相比,本发明具备以下有益效果:
50、1、本发明中,通过地图生成单元生成配送区域的二维仿真地图,进而为路线规划单元对送货最佳路径的形成提供详实可靠的数据支持,路线规划单元根据第一选择公式选择出送货的最佳路径起始点和终止点的可通行路径确定,路线规划单元根据第二选择公式选择出无人物流车配送过程中,从配送点到配送点最短的可通行路径,进行对配送过程中各个物流点间配送前后次序的依次确定,为物流车的配送过程提供配送效率较高的送货路线,实现送货的最佳路径规划。
51、2、本发明中,第一控制单元通过速度公式控制无人物流车在正常行驶状态下的速度,实现无人物流车在道路畅通情况下的正常行驶速度调控,第二控制单元通过减速公式控制无人物流车在识别前行方向10米内有障碍阻拦状态下的行驶速度,实现无人物流车在有障碍阻拦导致无法以正常行驶时的速度控制,且当阻碍消失时,无人物流车通过加速到正常行驶速度进行继续前行,第三控制单元通过转弯公式控制无人物流车在识别前行方向10米内一侧有障碍阻拦下的行驶状态,实现无人物流车在转弯时的速度控制,进而在配送过程中对无人物流车的行驶状态进行精细控制。
- 还没有人留言评论。精彩留言会获得点赞!