一种基于飞行时间相机的成像方法和成像系统与流程
本发明涉及图像处理领域,尤其涉及一种基于飞行时间相机的成像方法和成像系统。
背景技术:
1、随着科技的进步,飞行时间相机由于所具备诸多优势,其在医疗、三维成像、机器人等都领域发挥了显著的作用。
2、然而,飞行时间相机在雾天、水下、生物组织等散射场景中成像时,传感器接收的返回信号是目标反射光和散射光的混合信号,使得飞行时间相机的采集的图像具有一定的图像退化现象。这限制了飞行时间相机在水下形貌勘测、雾天自动驾驶、生物医学等领域中的应用。为了解决飞行时间相机退化问题,目前领域的研究人员已经开始研究飞行时间相机的图像复原算法,并且已经取得了一定的成果,现已经研究出多种图像复原算法来对退化图像进行复原。
3、鉴于引起图像退化的因素众多,针对不同的环境条件,需要考虑的图像退化因素不同,而同一飞行时间相机用于不同的环境条件下需要采用的图像复原算法也因此选择不同。因此,同一飞行时间相机系统能够适应在不同的环境条件下对所处环境进行采集后能够得到质量较高的图像数据的系统丞待提出。
技术实现思路
1、本发明实施例目的是提出一种基于飞行时间相机的成像方法和成像系统,该成像系统能够基于飞行时间相机,自动根据飞行时间相机所处的环境条件进行复原方法的确定,从而使得同一飞行时间相机可以适应不同的环境条件。
2、本发明实施例的第一方面提供一种基于飞行时间相机的成像方法,所述方法包括:所述方法包括:
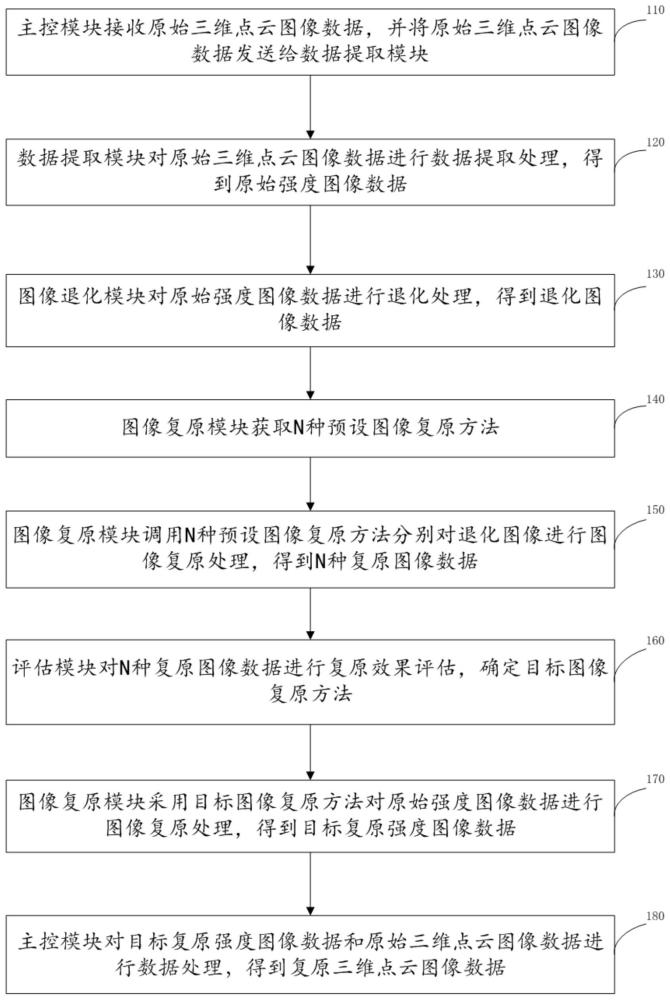
3、主控模块接收原始三维点云图像数据,并将所述原始三维点云图像数据发送给数据提取模块;
4、所述数据提取模块对所述原始三维点云图像数据进行数据提取处理,得到原始强度图像数据;
5、图像退化模块对所述原始强度图像数据进行退化处理,得到所述退化图像数据;
6、图像复原模块获取n种预设图像复原方法;其中,n为整数,n>1;
7、所述图像复原模块调用n种所述预设图像复原方法分别对所述退化图像进行图像复原处理,得到n种复原图像数据;其中,所述n种复原图像数据与所述n种预设图像复原方法一一对应;
8、所述评估模块对n种所述复原图像数据进行复原效果评估,确定目标图像复原方法;
9、所述图像复原模块采用所述目标图像复原方法对所述原始强度图像数据进行图像复原处理,得到目标复原强度图像数据;
10、所述主控模块对所述目标复原强度图像数据和所述原始三维点云图像数据进行数据处理,得到复原三维点云图像数据。
11、优选的,所述主控模块接收原始三维点云图像数据,并将所述三维点云图像数据发送给数据提取模块具体为:
12、所述飞行时间相机对所处环境进行图像采集处理,生成所述原始三维点云图像数据;
13、所述飞行时间相机将所述原始三维点云图像数据发送给主控制模块;
14、所述主控制模块接收所述三维点云图像数据,并将所述三维点云图像数据发送给所述数据提取模块。
15、优选的,所述数据提取模块对所述三维点云图像数据进行数据提取处理,得到所述原始强度图像数据具体包括:
16、所述数据提取模块采用预设图像数据提取方法对所述三维点云图像数据进行强度图像数据提取处理,得到所述原始强度图像数据。
17、优选的,所述图像退化模块对所述原始强度图像数据进行退化处理,得到所述退化图像数据具体为:
18、所述图像退化模块采用预设图像退化处理方法对所述原始强度图像数据进行退化处理,得到所述退化图像数据。
19、进一步优选的,所述预设图像退化处理方法为采用高斯模糊算法。
20、优选的,所述评估模块对n种所述复原图像数据进行复原效果评估,确定目标图像复原方法具体为:
21、所述评估模块采用预设图像均方误差算法分别对n种所述复原图像数据进行计算处理,得到n个复原图像均方误差;其中,n个所述复原图像均方误差与n种所述复原图像数据一一对应;
22、对所述n个所述复原图像均方误差进行比较,确定所述目标图像均方误差;
23、根据所述复原图像数据与所述复原图像均方误差的对应关系,以及所述复原图像数据与所述预设图像复原方法的对应关系,确定所述目标图像复原方法。
24、优选的,所述评估模块对n种所述复原图像数据进行复原效果评估,确定目标图像复原方法具体为:
25、所述评估模块采用预设图像峰值信噪比算法分别对n种所述复原图像数据进行计算处理,得到n个复原图像峰值信噪比;其中,n个所述复原图像峰值信噪比与n种所述复原图像数据一一对应;
26、对所述n个所述复原图像峰值信噪比进行比较,确定所述目标图像峰值信噪比;
27、根据所述复原图像数据与所述复原图像峰值信噪比的对应关系,以及所述复原图像数据与所述预设图像复原方法的对应关系,确定所述目标图像复原方法。
28、优选的,所述主控模块对所述目标复原强度图像数据和所述原始三维点云图像数据进行数据处理,得到复原三维点云图像数据具体为:
29、所述主控模块从所述原始三维点云图像数据中提取出所述原始深度图像数据;
30、对所述原始深度图像数据和所述目标复原强度图像数据进行融合处理,得到所述复原三维点云图像数据。
31、本发明实施例的第二方面提供一种基于飞行时间相机的成像系统,该系统包括:主控制模块、数据提取模块、图像退化模块、图像复原模块和评估模块;其中,
32、所述主控模块,用于接收原始三维点云图像数据,并将所述原始三维点云图像数据发送给数据提取模块;
33、所述数据提取模块,用于对所述原始三维点云图像数据进行数据提取处理,得到原始强度图像数据;
34、所述图像退化模块,用于对所述原始强度图像数据进行退化处理,得到所述退化图像数据;
35、所述图像复原模块,用于获取n种预设图像复原方法;其中,n为整数,n>1;
36、所述图像复原模块,还用于调用n种所述预设图像复原方法分别对所述退化图像进行图像复原处理,得到n种复原图像数据;其中,所述n种复原图像数据与所述n种预设图像复原方法一一对应;
37、所述评估模块,用于对n种所述复原图像数据进行复原效果评估,确定目标图像复原方法;
38、所述图像复原模块,还用于采用所述目标图像复原方法对所述原始强度图像数据进行图像复原处理,得到目标复原强度图像数据;
39、所述主控模块,还用于对所述目标复原强度图像数据和所述原始三维点云图像数据进行数据处理,得到复原三维点云图像数据。
40、优选的,所述系统还包括飞行时间相机,所述飞行时间相机用于对所处环境进行图像采集处理,生成所述原始三维点云图像数据;
41、所述飞行时间相机,还用于将所述原始三维点云图像数据发送给主控制模块。
42、本发明实施例提供一种基于飞行时间相机的成像方法,该系统预设多种图像复原方法,并且能够根据飞行时间相机所处的环境条件,从多种预设图像复原方法中选择能够在飞行时间相机所处环境中获得更高质量复原算法的目标图像复原算法,并且根据确定的目标复原算法对采集到的三维点云图像数据进行复原处理,得到高质量的复原三维点云图像数据。这中自动完成图像复原算法确定的方式,使得同一飞行时间相机能够对不同的环境条件进行采集都得到高质量的复原三维点云图像数据,大大提高了飞行时间相机的环境适应性。
- 还没有人留言评论。精彩留言会获得点赞!