一种基于摄像头图像识别的施工现场安全风险评估方法与流程
本发明属于施工现场安全管理,涉及到一种基于摄像头图像识别的施工现场安全风险评估方法。
背景技术:
1、建筑物拆卸是城市更新和土地再利用的重要环节,然而,建筑物拆卸现场中存在着各种潜在的安全风险,包括高处坠落、物体打击、电气危险、机械设备故障等,可能给工人和周围环境带来严重的伤害和损失。因此,对建筑物拆卸现场进行准确、及时的安全风险评估具有重要意义。
2、近年来,随着计算机视觉和图像识别技术的不断发展,利用摄像头图像进行建筑物拆卸现场安全风险评估成为一种前瞻性方式,通过对施工现场的实时监测图像进行分析和识别,可以实现对潜在安全隐患的及时发现和预警,虽满足现有要求,但仍存在一定的局限性表现:一方面现有方法依赖于专业人士事先规划好的建筑物倾倒控制区,主要以建筑物拆卸现场的倾倒控制区的障碍物清理排查作为建筑物拆卸现场的安全风险评估的决定性因素,在拆卸工作前未合理利用摄像头图像技术对建筑物拆卸现场的倾倒控制区规划范畴展开安全性分析,倾倒控制区规划范畴的二次审查缺失导致在风力条件、地形条件等影响下,建筑物拆卸后可能无法完全有把握地全部倾倒在已规划好的倾倒控制区内,进而增加安全事故发生的风险。
3、另一方面,现有技术缺乏针对建筑物拆卸过程中的倾倒偏移风险的细致性实时性评估,虽然预先规划的倾倒控制区域已考虑到风力、地形等因素对建筑物倾倒的影响,但是由于拆卸过程的不可控性,建筑物在实际操作中可能会发生倾倒偏移,超出预期的倾倒范围,甚至无法完全倾倒在规划好的控制区域内,从而带来潜在的安全风险。
技术实现思路
1、鉴于此,为解决上述背景技术中所提出的问题,现提出一种基于摄像头图像识别的施工现场安全风险评估方法。
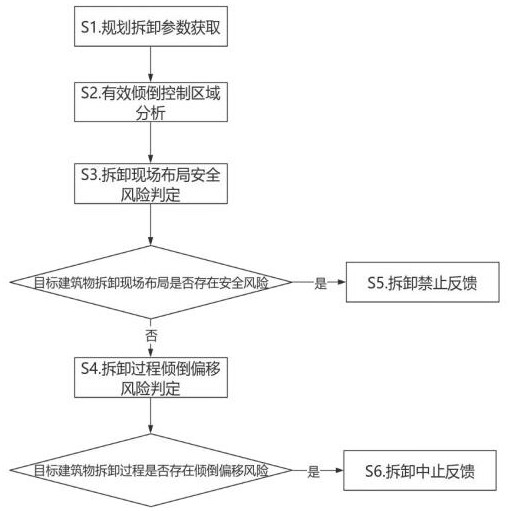
2、本发明的目的可以通过以下技术方案实现:本发明提供一种基于摄像头图像识别的施工现场安全风险评估方法,包括:s1.规划拆卸参数获取:当液压剪式机械抵达目标建筑物拆卸现场时,提取web云端存储的目标建筑物的规划拆卸参数,包括设定倾倒方向角度、各设定拆卸节点的位置和顺序、规划倾倒控制区域的长度、宽度和主轴方向角度。
3、s2.有效倾倒控制区域分析:基于目标建筑物的规划拆卸参数中的设定倾倒方向角度,分析目标建筑物的有效倾倒控制区域的长度、宽度和主轴方向角度。
4、s3.拆卸现场布局安全风险判定:利用无人机俯拍目标建筑物拆卸现场平面图像,分别在目标建筑物拆卸现场平面图像内确定目标建筑物的有效倾倒控制区域和规划倾倒控制区域,判定目标建筑物拆卸现场布局是否存在安全风险,若判定目标建筑物拆卸现场布局是存在安全风险,则执行s5,反之执行s4。
5、s4.拆卸过程倾倒偏移风险判定:向远程操控员进行拆卸许可反馈,将目标建筑物的规划拆卸参数中拆卸顺序排列在前设定数量的各设定拆卸节点记为各考察拆卸节点,获取液压剪式机械逐一拆卸各考察拆卸节点后目标建筑物的倾斜方向角度,判定目标建筑物拆卸过程是否存在倾倒偏移风险,若判定目标建筑物拆卸过程是存在倾倒偏移风险,则执行s6,反之继续进行拆卸工作。
6、s5.拆卸禁止反馈:向远程操控员进行拆卸禁止反馈。
7、s6.拆卸中止反馈:向远程操控员进行拆卸中止反馈。
8、优选地,所述分析目标建筑物的有效倾倒控制区域的长度、宽度和主轴方向角度,包括:利用无人机对拆卸前的目标建筑物进行全方位图像采集,获取目标建筑物拆卸前的全方位图像并构建目标建筑物的初始三维模型,将其导入建模软件中,通过建模软件旋转工具和剖面切割工具获取目标建筑物在设定倾倒方向角度下的剖面视图,利用建模软件的测量工具获取目标建筑物在设定倾倒方向角度下剖面的长度和宽度,将其分别作为目标建筑物参照倾倒控制区域的长度和宽度,将设定倾倒方向角度作为目标建筑物参照倾倒控制区域的主轴方向角度,进而构建目标建筑物的参照倾倒控制区域。
9、利用无人机对目标建筑物的参照倾倒控制区域进行图像采集,获取目标建筑物参照倾倒控制区域的地形参数,包括坡度、相对高程和地形曲率,由公式得到目标建筑物的参照倾倒控制区域的修正长度,其中分别表示预设的平整地形条件下的坡度、相对高程和地形曲率,表示,表示自然常数。
10、根据目标建筑物拆卸前的全方位图像,获取目标建筑物的相关结构参数,包括整体表面积、结构形状类型、墙体表面的各腐蚀区域面积和各裂纹长度,其中表示墙体表面各腐蚀区域的编号,,表示墙体表面各裂纹的编号,,进而分析目标建筑物的参照倾倒控制区域的修正宽度。
11、通过气象台获取目标建筑物所处位置未来设定时间段的风向角度、空气密度和平均风速,进而分析目标建筑物的参照倾倒控制区域的修正主轴方向角度。
12、将目标建筑物的参照倾倒控制区域的修正长度、修正宽度和修正主轴方向角度分别作为目标建筑物的有效倾倒控制区域的长度、宽度和主轴方向角度。
13、优选地,所述分析目标建筑物的参照倾倒控制区域的修正宽度,包括:根据目标建筑物的结构形状类型,提取web云端存储的目标建筑物的结构形状类型对应的结构稳定权重因子,分析目标建筑物的结构稳定系数,其计算公式为:,进而由公式得到目标建筑物的参照倾倒控制区域的修正宽度,其中表示预设的建筑物结构稳定系数合理阈值。
14、优选地,所述分析目标建筑物的参照倾倒控制区域的修正主轴方向角度,包括:同目标建筑物在设定倾倒方向角度下剖面的长度和宽度的获取方法一致,获取目标建筑物在未来设定时间段的风向角度下的剖面长度和宽度,将二者相乘得到目标建筑物未来设定时间段的受风面积。
15、结合目标建筑物所处位置未来设定时间段内的空气密度和平均风速,计算目标建筑物未来设定时间段的风力荷载值,,其中表示web云端存储的目标建筑物结构形状类型对应的标准风压系数,表示预设的风力荷载修正因子。
16、根据web云端存储的目标建筑物允许承受风力荷载阈值,由公式得到目标建筑物的参照倾倒控制区域的修正主轴方向角度,其中为目标建筑物的参照倾倒控制区域的参照主轴方向角度。
17、优选地,所述目标建筑物的参照倾倒控制区域的参照主轴方向角度的获取方法为:根据目标建筑物的设定倾倒方向角度和目标建筑物所处位置未来设定时间段的风向角度,分别确定目标建筑物的设定倾倒方向向量以及目标建筑物所处位置未来设定时间段的风向向量,其中分别为目标建筑物的设定倾倒方向角度的弧度转化值和目标建筑物所处位置未来设定时间段的风向角度的弧度转化值,,,表示圆周率,计算目标建筑物的参照倾倒控制区域的参照主轴方向角度,,其中表示,表示,表示,表示预设的基础修正主轴方向角度。
18、优选地,所述分别在目标建筑物拆卸现场平面图像内确定目标建筑物的有效倾倒控制区域和规划倾倒控制区域,包括:将目标建筑物所处位置标注为参照点,根据目标建筑物的有效倾倒控制区域的长度、宽度和主轴方向角度,以参照点为外框宽度的中心点位置,按照图像设定比例尺在目标建筑物拆卸现场平面图像中绘制出有效倾倒控制区域的外框,进而在目标建筑物拆卸现场平面图像内确定目标建筑物的有效倾倒控制区域并标记为区域a。
19、同理,根据目标建筑物的规划拆卸参数中规划倾倒控制区域的长度、宽度和主轴方向角度,在目标建筑物拆卸现场平面图像内确定目标建筑物的规划倾倒控制区域并标记为区域b。
20、优选地,所述判定目标建筑物拆卸现场布局是否存在安全风险,包括:对目标建筑物拆卸现场平面图像进行预处理和二值化处理,获取图像区域b内各像素灰度值,将各像素与其相邻各像素的灰度值作差,获取各像素的最大灰度差异值,筛选出目标建筑物拆卸现场平面图像区域b内各潜在障碍像素,通过连通域搜索进一步获取目标建筑物拆卸现场平面图像区域b内的各潜在障碍子区域,构建目标建筑物拆卸现场平面图像区域b内各潜在障碍子区域的纹理直方图向量,将其分别与web云端存储的障碍物标准纹理直方图向量进行相似度计算,若某潜在障碍子区域的纹理直方图向量与障碍物标准纹理直方图向量的相似度大于预设值,则将该潜在障碍子区域记为有效障碍子区域,进而统计目标建筑物拆卸现场平面图像区域b内有效障碍子区域数量。
21、若目标建筑物拆卸现场平面图像中区域b包含区域a且区域b内有效障碍子区域数量为0,则判定目标建筑物拆卸现场布局不存在安全风险,反之判定目标建筑物拆卸现场布局存在安全风险。
22、优选地,所述判定目标建筑物拆卸过程是否存在倾倒偏移风险,包括:
23、将目标建筑物的有效倾倒控制区域的主轴方向角度作为指定方向角度。
24、将液压剪式机械逐一拆卸各考察拆卸节点后目标建筑物的倾斜方向角度分别与指定方向角度作差,得到各考察拆卸节点拆卸后目标建筑物的倾倒偏差角度,进而以考察拆卸节点编号为横轴,以倾倒偏差角度为纵轴,绘制目标建筑物的拆卸偏差折线图并导入matlab软件内,利用matlab软件的拟合工具获取目标建筑物的拆卸偏差折线拟合函数,将拆卸顺序排列最末的设定拆卸节点编号代入拟合函数内,获取拆卸顺序排列最末的设定拆卸节点拆卸后目标建筑物的倾倒偏差角度,由公式得到目标建筑物拆卸最后一设定拆卸节点后的倾斜方向角度,将其作为主轴方向角度,结合目标建筑物的有效倾倒控制区域的长度和宽度,在目标建筑物拆卸现场平面图像内确定目标建筑物拆卸最后一设定拆卸节点后的预计倾倒区域并标记为区域c,若目标建筑物拆卸现场平面图像中区域a包含区域c,则判定目标建筑物拆卸过程不存在倾倒偏移风险,反之判定目标建筑物拆卸过程存在倾倒偏移风险。
25、相较于现有技术,本发明的有益效果如下:(1)本发明通过获取目标建筑物在设定倾倒方向角度下的剖面视图,个性化了解目标建筑物在设定倾倒方向下的结构特征,以此构建目标建筑物的参照倾倒控制区域,为后续目标建筑物的有效倾倒控制区域的规划精准性和合理性奠定基础。
26、(2)本发明分别依据地形条件、目标建筑物的结构条件、风力条件对目标建筑物的参照倾倒控制区域的宽度、长度、主轴方向角度进行修正,进而合理有效规划目标建筑物的有效倾倒控制区域,完善现有方法针对倾倒控制区规划范畴的二次审查的缺失,提高拆除工作的安全性和可行性。
27、(3)本发明利用无人机俯拍目标建筑物拆卸现场平面图像,分别在目标建筑物拆卸现场平面图像内确定目标建筑物的有效倾倒控制区域和规划倾倒控制区域,一方面基于规划倾倒控制区域的图像特征了解规划倾倒控制区域的障碍物清理情况,另一方面基于有效倾倒控制区域和规划倾倒控制区域在图像内的外框范畴了解规划倾倒控制区域的规划安全性,在目标建筑物拆卸前充分评估目标建筑物拆卸现场布局的安全风险可能性,提高施工现场的安全管理水平。
28、(4)本发明基于液压剪式机械逐一拆卸各考察拆卸节点后目标建筑物的倾斜方向角度,预估目标建筑物拆卸最后一设定拆卸节点后的倾斜方向角度,一旦目标建筑物的倾斜方向角度偏移过甚,就能立即采取相应措施,进而确保拆卸过程的风险可控性,既保障拆卸工作的顺利进行,并最大程度地降低意外事故的发生几率。
- 还没有人留言评论。精彩留言会获得点赞!