一种自动泊车系统评价方法与流程
本发明涉及自动泊车系统,尤其涉及一种自动泊车系统评价方法。
背景技术:
1、自动泊车技术作为智能汽车的重要组成部分,主要由车位探测、路径规划和跟踪控制3部分组成,泊车时不需要驾驶员的干预,自动控制车辆完成泊车,使驾乘的安全性和舒适性显著提高,以及发生交通事故时车辆受损和人员伤亡的次数大幅降低,驾驶员对自动泊车功能的需求愈发强烈。在自动泊车系统的开发过程中,需要对自动泊车系统进行轨迹仿真评价测试,以便于开发人员针对性地对自动泊车系统进行优化和改进升级。现有的自动泊车系统评价主要包括实车测试和仿真测试两种模式。公开号为cn108414238a的发明专利公开了一种自动泊车功能实车测试系统及测试方法,包括车辆子系统、无人机子系统和数据处理显示子系统,车辆子系统用于采集发送自动泊车控制器计算的车辆位姿、车位位置、障碍物位置数据,搭载图像传感器无人机子系统用于采集真实的车辆位姿、车位位置、障碍物位置数据,数据处理显示子系统用于实时的显示车辆、车位、障碍物的真实数据及自动泊车控制器的计算数据,并能对数据进行处理,给出量化指标,该专利通过对带有自动泊车控制器的实车进行测试来对自动泊车功能进行评价,实车测试需要将自动泊车系统完整的搭载到实车上,并实地进行测试,虽然测试结果更符合实际情况,但前期准备时间长,测试成本高。而公开号为cn115292923a的发明专利公开了一种基于场景库的自动泊车轨迹评价方法及系统,包括:创建泊车场景并生成场景库文件;从场景库中选择至少一个泊车场景并从算法库中调用至少一种规划算法,生成所选泊车场景下的泊车轨迹信息;根据所述泊车轨迹信息生成轨迹评价报告,分别对规划算法生成的轨迹优劣以及规划算法的性能进行评价,该专利虽然不需要实车测试,但在对自动泊车系统的功能进行评价时并没有考虑到车辆硬件对自动泊车系统的影响,导致评价结论片面化。
技术实现思路
1、鉴于此,本发明的目的在于提供一种自动泊车系统评价方法,在不需要实车实地进行测试的同时充分考虑硬件对自动泊车系统性能的影响,对自动泊车系统进行全面评价。
2、为实现上述发明目的,本发明提供一种自动泊车系统评价方法,所述方法包括步骤:
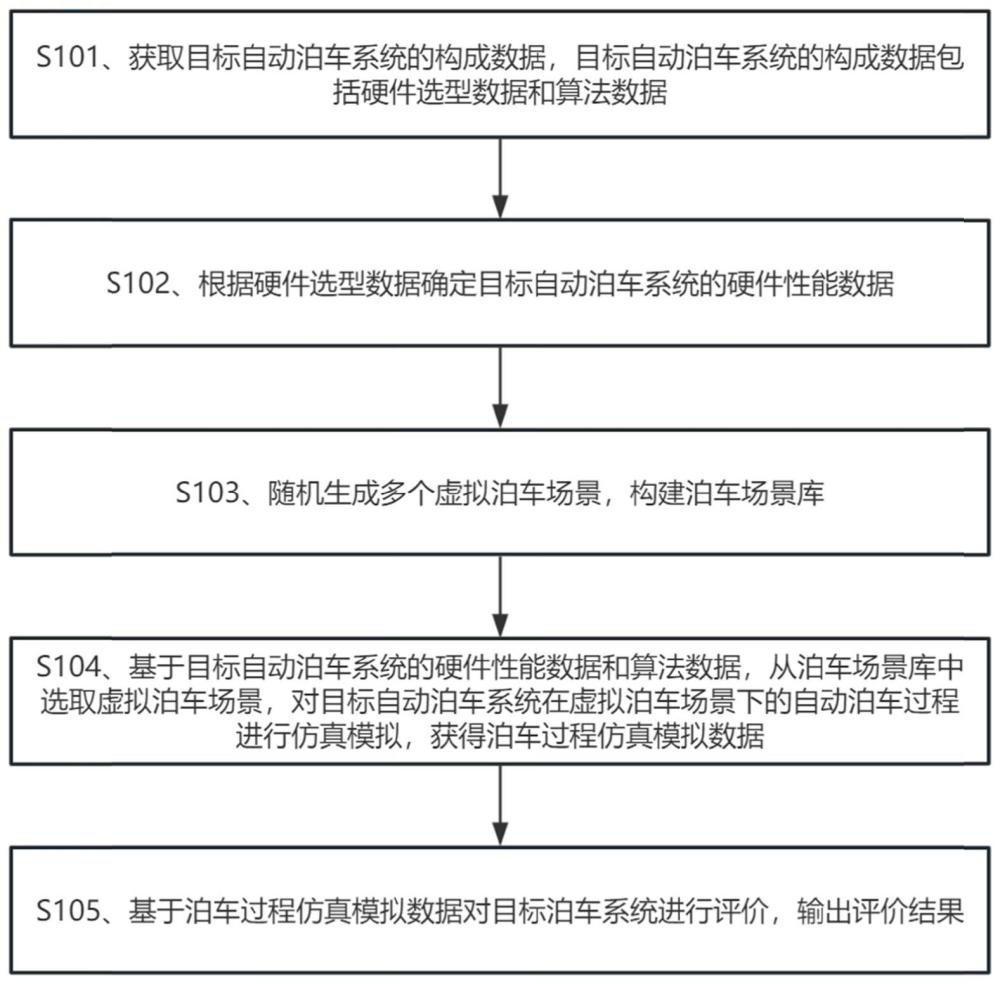
3、s101、获取目标自动泊车系统的构成数据,目标自动泊车系统的构成数据包括硬件选型数据和算法数据;
4、s102、根据硬件选型数据确定目标自动泊车系统的硬件性能数据;
5、s103、随机生成多个虚拟泊车场景,构建泊车场景库;
6、s104、基于目标自动泊车系统的硬件性能数据和算法数据,从泊车场景库中选取虚拟泊车场景,对目标自动泊车系统在虚拟泊车场景下的自动泊车过程进行仿真模拟,获得泊车过程仿真模拟数据;
7、s105、基于泊车过程仿真模拟数据对目标泊车系统进行评价,输出评价结果。
8、进一步的,所述硬件选型数据包括传感器型号数据,所述算法数据包括路径规划算法数据和跟踪控制算法数据。
9、进一步的,根据硬件选型数据确定目标自动泊车系统的硬件性能数据,具体包括以下步骤:
10、s201、根据硬件选型数据确定目标自动泊车系统所采用的车位探测传感器型号;
11、s202、根据各个车位探测传感器型号查询并获取相应型号车位探测传感器的性能数据,汇总不同型号的车位探测传感器的性能数据作为硬件性能数据。
12、进一步的,随机生成多个虚拟泊车场景,构建泊车场景库,具体包括以下步骤:
13、s301、设置场景约束条件可取值,所述场景约束条件的类型包括场地类型、车位划线类型、车位大小、行车道大小、天气类型、光照强度和障碍物数量,每项场景约束条件包括多个可取值;
14、s302、对不同类型的场景约束条件的可取值进行随机组合,获得多个场景综合约束条件;
15、s303、基于多个场景综合约束条件依次生成相应的虚拟泊车场景。
16、进一步的,步骤s104具体包括以下步骤:
17、s401、从泊车场景库中选择虚拟泊车场景,在所选择的虚拟泊车场景中生成虚拟车辆并设定其车身尺寸和起始位置;
18、s402、根据目标自动泊车系统的硬件性能数据创建虚拟传感器,并根据目标自动泊车系统的算法数据创建虚拟路径规划器和虚拟跟踪控制器,为虚拟车辆绑定虚拟传感器、虚拟路径规划器和虚拟跟踪控制器;
19、s403、虚拟传感器基于虚拟车辆所处的虚拟泊车场景及起始位置,生成传感数据,并输出至虚拟路径规划器和虚拟跟踪控制器,虚拟路径规划器基于传感数据生成规划路径,将规划路径发送至虚拟跟踪控制器;
20、s404、虚拟跟踪控制器控制虚拟车辆沿规划路径移动,在虚拟车辆移动过程中,虚拟传感器不断根据虚拟车辆在虚拟泊车场景中的实时位置生成新的传感数据并输出至虚拟跟踪控制器,虚拟跟踪控制器根据实时接收的传感数据调整对虚拟车辆的控制,直至虚拟车辆移动到规划路径终点;
21、s405、在虚拟车辆自动泊车过程中,记录传感数据、自动泊车时间、虚拟车辆移动轨迹、虚拟路径规划器计算时间和计算资源占用数据、虚拟跟踪控制器计算时间和计算资源占用数据,将所记录数据与虚拟车辆车身尺寸数据、虚拟泊车场景汇总为泊车过程仿真模拟数据。
22、进一步的,步骤s104具体还包括以下步骤:
23、s501、设置干扰虚拟车辆的车身尺寸、起始位置和移动模式;
24、s502、在步骤s401所选择的虚拟泊车场景中生成干扰虚拟车辆;
25、s503、在虚拟车辆自动泊车过程中,控制干扰虚拟车辆按照预设的移动模式移动。
26、进一步的,基于泊车过程仿真模拟数据对目标泊车系统进行评价,具体包括以下步骤:
27、s601、建立多维度的自动泊车系统评价体系,自动泊车系统评价体系包括硬件、软件、安全性和乘坐感受;
28、s602、基于目标自动泊车系统采用的车位探测传感器型号、性能数据和传感数据,自动生成目标自动泊车系统的硬件评价内容;
29、s603、基于目标自动泊车系统的算法数据、虚拟路径规划器计算时间和计算资源占用数据、虚拟跟踪控制器计算时间和计算资源占用数据,自动生成目标自动泊车系统的软件评价内容;
30、s604、基于泊车过程仿真模拟数据中的传感数据、虚拟车辆移动轨迹和虚拟场景,自动生成目标自动泊车系统的安全性评价内容;
31、s605、基于泊车过程仿真模拟数据中的自动泊车时间、虚拟车辆移动轨迹,自动生成目标自动泊车系统的乘坐感受评价内容;
32、s606、基于步骤s602~s605生成的评价内容输出目标自动泊车系统的评价结果。
33、与现有技术相比,本发明的有益效果是:
34、本发明提供的一种自动泊车系统评价方法,基于目标自动泊车系统的硬件选型数据和算法数据,对目标自动泊车系统在虚拟泊车场景下的自动泊车过程进行仿真模拟,再进一步基于泊车过程仿真模拟数据,对目标泊车系统进行评价,一方面不需要实车实地进行测试,能够有效降低前期开发成本,测试效率高;另一方面在仿真模拟过程中充分考虑了自动泊车系统硬件和软件两个层面的性能,对自动泊车系统的评价结论更加全面准确,能够有效帮助开发人员发现自动泊车系统不同维度的缺陷并对其进行优化改进。
- 还没有人留言评论。精彩留言会获得点赞!