本发明涉及电力线路测量,尤其涉及一种基于改进双目视觉技术的架空线路线径测量方法及系统。
背景技术:
1、随着电网大规模建设,10kv架空线路分段数量越来越多,导线型号越来越复杂。每月底需更新的线路台账数量非常大,极易造成线路台账信息录入不到位或更新不及时,导致线路台账信息与实际不符,进而增加配网规划设计与建设的难度。
2、现有的架空线路导线线径测量方法无法实现带电检测,目前只能在线路停电时,使用一些特质工具和方法,例如登杆通过游标卡尺测量出导线线径,此类方法繁琐、效率低、出错率高,尤其在测量过程中存在很严重的人身和设备安全问题。并且在生产作业中,为了测量导线线径而去申请线路停电是不切实际的。
3、目前对导线直径进行带电测量的方法鲁棒性较差,难以适应在复杂环境下使用,容易导致架空线路导线线径测量的精度较差。
技术实现思路
1、本发明提供了一种基于改进双目视觉技术的架空线路线径测量方法及系统,解决了现有技术对导线直径进行带电测量的方法鲁棒性较差,难以适应在复杂环境下使用,容易导致架空线路导线线径测量的精度较差的技术问题。
2、有鉴于此,本发明第一方面提供了一种基于改进双目视觉技术的架空线路线径测量方法,包括以下步骤:
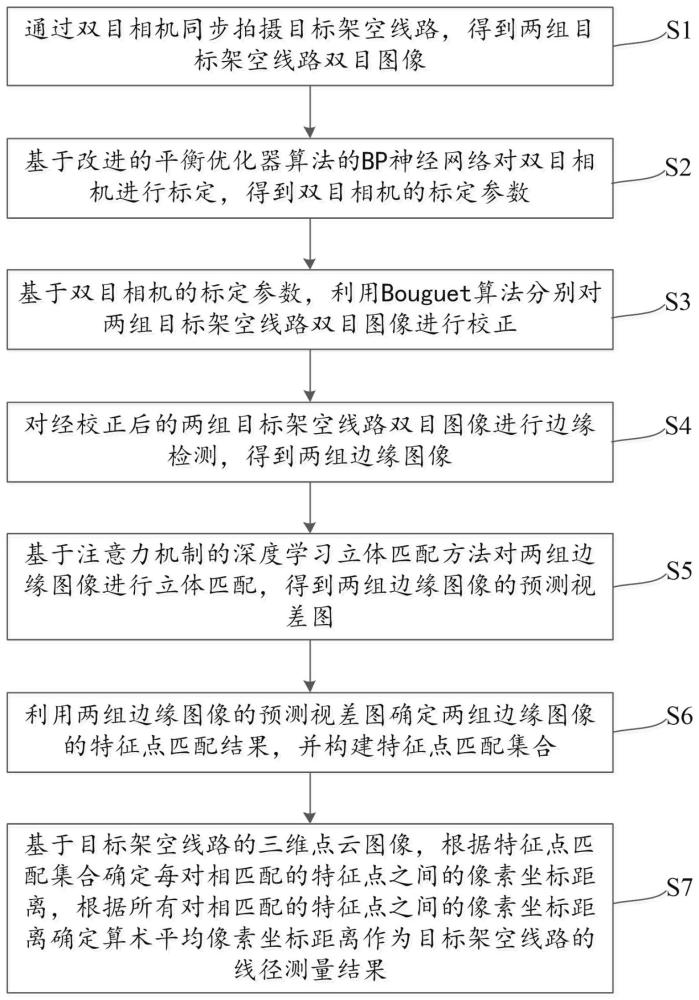
3、通过双目相机同步拍摄目标架空线路,得到两组目标架空线路双目图像;
4、基于改进的平衡优化器算法的bp神经网络对所述双目相机进行标定,得到所述双目相机的标定参数;
5、基于所述双目相机的标定参数,利用bouguet算法分别对两组所述目标架空线路双目图像进行校正;
6、对经校正后的两组目标架空线路双目图像进行边缘检测,得到两组边缘图像;
7、基于注意力机制的深度学习立体匹配方法对两组所述边缘图像进行立体匹配,得到两组所述边缘图像的预测视差图;
8、利用两组所述边缘图像的预测视差图确定两组所述边缘图像的特征点匹配结果,并构建特征点匹配集合;
9、基于目标架空线路的三维点云图像,根据所述特征点匹配集合确定每对相匹配的特征点之间的像素坐标距离,根据所有对相匹配的特征点之间的像素坐标距离确定算术平均像素坐标距离作为目标架空线路的线径测量结果。
10、优选地,本方法还包括:
11、通过双目相机同步获取目标架空线路的同一幅图像的对应点成像的像素差确定图像深度信息;
12、根据所述图像深度信息构建目标架空线路的三维点云图像。
13、优选地,所述基于改进的平衡优化器算法的bp神经网络对所述双目相机进行标定,得到所述双目相机的标定参数的步骤,具体包括:
14、构建bp神经网络的初始结构;
15、初始化bp神经网络的收敛阈值和权值;
16、基于改进的平衡优化器算法对所述bp神经网络的收敛阈值和权值进行优化;
17、根据所述双目相机拍摄的历史架空线路图像确定图像像素点坐标数据和真实世界坐标数据构建训练数据集;
18、根据优化后的bp神经网络对所述训练数据集进行训练,得到训练好的bp神经网络;
19、利用所述训练好的bp神经网络对所述双目相机进行标定,得到所述双目相机的标定参数。
20、优选地,所述基于改进的平衡优化器算法对所述bp神经网络的收敛阈值和权值进行优化的步骤,具体包括:
21、基于bp神经网络初始化得到的收敛阈值和权值,利用改进的tent混沌映射序列随机生成初始粒子,所述改进的tent混沌映射序列表示为:
22、
23、式中,n表示解的维度,xn表示混沌变量序列,xn+1表示混沌变量映射序列;
24、根据预设的适应度函数计算所有粒子的适应度值;
25、根据所有粒子的适应度值构建平衡池,更新指数项系数以及质量生成速率,并更新粒子的当前解;
26、判断粒子的当前解的维度是否大于预设解的最大维度,若判断粒子的当前解的维度不大于预设解的最大维度,则输出相应的粒子的当前解作为最优解,若判断粒子的当前解的维度大于预设解的最大维度,则更新迭代次数加1,并转至所述根据所有粒子的适应度值构建平衡池,更新指数项系数以及质量生成速率,并更新粒子的当前解的步骤;
27、对所述最优解进行解码,得到优化后的收敛阈值和权值。
28、优选地,所述对经校正后的两组目标架空线路双目图像进行边缘检测,得到两组边缘图像的步骤,具体包括:
29、对经校正后的两组目标架空线路双目图像提取roi区域;
30、利用改进的高斯滤波对所述roi区域进行高斯滤波降噪,其中,所述改进的高斯滤波的函数表达式为:
31、
32、式中,r(x,y,a,b)表示值域核,(x,y)表示当前像素点的坐标,(a,b)别表示预设邻域中的像素点的坐标,f(x,y)表示当前像素点,f(a,b)表示预设邻域中的像素点,分别为定义域方差、值域方差;
33、利用四方向sobel算子对滤波降噪后的roi区域计算图像梯度,得到梯度图像;
34、利用梯度图像对应的各像素点的梯度幅值进行非极大值抑制处理,得到初始边缘图像,所述初始边缘图像中包含多个候选边缘点的像素点;
35、利用最大类间方差法计算所述初始边缘图像中的分割阈值,利用所述分割阈值在所述初始边缘图像中筛选出边缘点,并采用领域法去除孤立噪声点,得到边缘图像。
36、优选地,所述基于注意力机制的深度学习立体匹配方法对两组所述边缘图像进行立体匹配,得到两组所述边缘图像的预测视差图的步骤,具体包括:
37、利用cnn网络分别提取所述边缘图像的浅层特征,得到边缘图像浅层特征;
38、利用空间金字塔注意力机制对所述边缘图像浅层特征进行的全局平均池化操作,得到边缘图像全局特征;
39、将所述边缘图像全局特征进行代价聚合,构建轻量级匹配代价体;
40、利用注意力堆叠沙漏对所述轻量级匹配代价体进行细化;
41、采用双线性插值法对细化后的轻量级匹配代价体进行上采样至原始图像分辨率,得到新的代价体;
42、并通过视差回归函数对所述新的代价体进行视差回归预测,生成预测视差图。
43、第二方面,本发明还提供了一种基于改进双目视觉技术的架空线路线径测量系统,包括:
44、图像获取模块,用于通过双目相机同步拍摄目标架空线路,得到两组目标架空线路双目图像;
45、相机标定模块,用于基于改进的平衡优化器算法的bp神经网络对所述双目相机进行标定,得到所述双目相机的标定参数;
46、图像校正模块,用于基于所述双目相机的标定参数,利用bouguet算法分别对两组所述目标架空线路双目图像进行校正;
47、边缘检测模块,用于对经校正后的两组目标架空线路双目图像进行边缘检测,得到两组边缘图像;
48、立体匹配模块,用于基于注意力机制的深度学习立体匹配方法对两组所述边缘图像进行立体匹配,得到两组所述边缘图像的预测视差图;
49、特征点匹配模块,用于利用两组所述边缘图像的预测视差图确定两组所述边缘图像的特征点匹配结果,并构建特征点匹配集合;
50、线径测量模块,用于基于目标架空线路的三维点云图像,根据所述特征点匹配集合确定每对相匹配的特征点之间的像素坐标距离,根据所有对相匹配的特征点之间的像素坐标距离确定算术平均像素坐标距离作为目标架空线路的线径测量结果。
51、第三方面,本发明还提供了一种电子设备,所述电子设备包括存储器和处理器;
52、所述存储器用于存储程序;
53、所述处理器执行所述程序实现上述的方法。
54、第四方面,本发明还提供了一种计算机可读存储介质,所述存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述的方法。
55、从以上技术方案可以看出,本发明具有以下优点:
56、本发明通过基于改进的平衡优化器算法的bp神经网络对双目相机进行标定,提高双目相机的标定准确性,还对经校正后的两组目标架空线路双目图像进行边缘检测,基于注意力机制的深度学习立体匹配方法对两组边缘图像进行立体匹配,从而考虑到不同环境下对算法的匹配精度以及鲁棒性的影响,在深度学习原有基础上加入了注意力机制,提升了匹配精度和算法的鲁棒性,还通过利用两组边缘图像的预测视差图确定两组边缘图像的特征点匹配结果,并确定每对相匹配的特征点之间的距离,根据所有对相匹配的特征点之间的像素坐标距离确定算术平均像素坐标距离作为目标架空线路的线径测量结果,提高了架空线路导线线径测量的精度。