一种IRS和UAV辅助MEC系统中的能耗优化方法
本发明属于移动边缘计算领域,具体涉及一种irs和uav辅助mec系统中的能耗优化方法。
背景技术:
1、第五代通信网络和物联网带来了智能设备的快速增长,同时催生了新应用的爆炸式增长,例如自动驾驶、虚拟现实、增强现实、移动健康等。这些应用大多是延迟敏感和计算密集型的。然而,由于终端设备的资源通常有限,无法在本地支持这些应用,将任务传输到云服务器可能会违反时间约束。为了解决这个问题,移动边缘计算(mobile edgecomputing,mec)服务器被设计为与蜂窝基站(base station,bs)共定位,将云计算功能靠近终端设备,从而减少通信延迟和网络流量。但是,在发生大规模自然灾害或其他突发事件时,现有蜂窝bs和地面基础设施可能会遭到破坏或严重超载。为此,无人机(unmannedaerial vehicle,uav)可以作为机载bs,搭载mec服务器,为地面用户提供通信和计算服务。与地面bs相比,uav形式的空中bs跟地面用户之间形成了视距链接。然而,有高层建筑或山区的地区仍然面临uav和用户之间频繁中断无线链路的挑战,特别是当两个单元都在运动时。近年来,智能反射面(intelligent reconfigurable surface,irs)被认为是一种很有前途的技术,它可以通过自适应地重新配置无线传播环境来增强无线网络的容量和覆盖范围。irs集成了大量的无源反射单元,每个单元都对入射信号的相移或幅度进行独立调整,从而协同创建适合无线电信号传播的环境,提高无线通信的质量。将irs集成到uav辅助的mec系统中,有助于在用户和uav之间建立串联的虚拟视距链路。
2、大多数手持用户设备一般电池容量较小,存储和计算能力有限,但它们可以在短时间内生成大量数据,因此需要考虑用户设备的能耗。目前在mec系统中同时结合irs和uav是一个非常前沿的方向,但是目前针对这一方面的研究工作还比较少,现有的工作考虑irs和mec的系统大多数使用传统的优化算法来求解(如凸优化算法),但对于用户是运动的来说,采用传统的优化算法会使得搜索空间随着参数数量的增加而扩大,此外,由于irs有很多反射元素,如果将所有的优化变量都放入强化学习的动作空间中,这对强化学习算法的收敛性也提出了一定的挑战。
技术实现思路
1、本发明的目的在于针对解决背景技术中提出的问题,提出一种irs和uav辅助mec系统中的能耗优化方法。
2、为实现上述目的,本发明所采取的技术方案为:
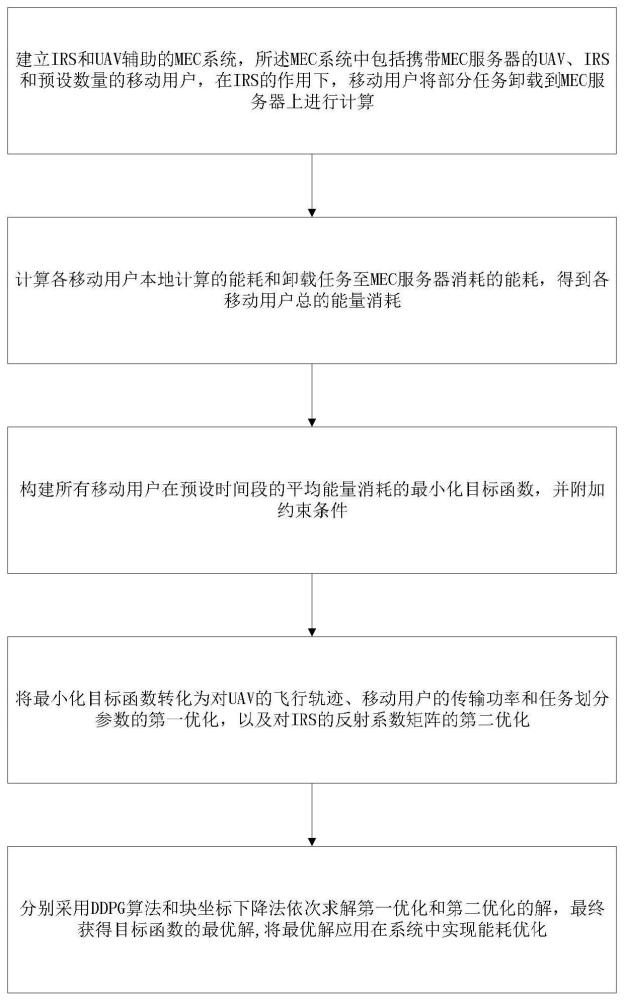
3、本发明提出的一种irs和uav辅助mec系统中的能耗优化方法,包括:建立irs和uav辅助的mec系统,所述mec系统中包括携带mec服务器的uav、irs和预设数量的移动用户,在irs的作用下,移动用户将部分任务卸载到mec服务器上进行计算;
4、计算各移动用户本地计算的能耗和卸载任务至mec服务器消耗的能耗,得到各移动用户总的能量消耗;
5、构建所有移动用户在预设时间段的平均能量消耗的最小化目标函数,并附加约束条件;
6、将最小化目标函数转化为对uav的飞行轨迹、移动用户的传输功率和任务划分参数的第一优化,以及对irs的反射系数矩阵的第二优化;
7、分别采用ddpg算法和块坐标下降法依次求解第一优化和第二优化的解,最终获得目标函数的最优解,将所述最优解应用在系统中实现能耗优化。
8、优选地,所述建立irs和uav辅助的mec系统,所述mec系统中包括携带mec服务器的uav、irs和预设数量的移动用户,在irs的作用下,移动用户将部分任务卸载到mec服务器上进行计算,包括:
9、各移动用户表示为n∈{1,...,n},n为移动用户的数量,将mec系统的总时间划分为t个时隙,且时隙表示为t∈{1,...,t},irs的反射元素表示为k∈{1,...,k},k为irs的反射元素的数量,在时隙t,irs反射系数矩阵表示为是irs上第k个反射元素对入射信号作出的相移,其中q'=2b,j表示复数,b为控制可用相移取值的数量;
10、各移动用户到uav、各移动用户到irs和irs到uav的信道增益依次表示为:hn,u(t),和其中表示维度为k×1复矩阵,则各移动用户的复合信道增益为:在每个时隙t开始,各移动用户产生任务量为ln(t),为各移动用户引入一个任务划分参数βn(t),且βn(t)ln(t)大小的任务量在本地计算,(1-βn(t))ln(t)大小的任务量被卸载至mec服务器计算。
11、优选地,所述根据mec系统,计算各移动用户本地计算的能耗和卸载任务至mec服务器消耗的能耗,得到各移动用户总的能量消耗,包括:
12、各移动用户本地计算的能耗en,l(t)的公式如下:
13、en,l(t)=κfn3dn,l(t)
14、其中,
15、
16、其中,κ表示本地计算的处理器芯片的有效电容系数,fn表示各移动用户的计算频率,dn,l(t)表示各移动用户本地任务计算时间,cn表示各移动用户计算1比特任务所需的cpu周期数;
17、各移动用户卸载任务至mec服务器消耗的能耗en,c(t)的公式如下:
18、en,c(t)=dn,c(t)pn(t)
19、其中,
20、
21、
22、其中,pn(t)表示各移动用户的传输功率,dn,c(t)表示各移动用户卸载任务至mec服务器的时间,rn(t)表示各移动用户的任务卸载速率,σ2表示噪声功率,ωi,l(t)表示noma传输解码指示器,当ωi,l(t)=1,则表示第i个移动用户的信道增益<第l个移动用户的信道增益,且第l个移动用户先解码,第i个移动用户后解码,i,l∈n;
23、则各移动用户总的能量消耗en(t)=en,l(t)+en,c(t)。
24、优选地,所述构建所有移动用户在预设时间段的平均能量消耗的最小化目标函数,并附加约束条件,包括:
25、最小化目标函数的公式如下:
26、p0:
27、s.t.c1:
28、c2:
29、c3:
30、c4:
31、c5:
32、c6:
33、c7:vu(t)≤vmax
34、c8:0≤θu(t)≤2π
35、c9:0≤xu(t)≤xmax,0≤yu(t)≤ymax
36、c10:
37、其中,
38、
39、
40、
41、
42、其中,c1和c2是irs相移的约束,c3是任务完成时间的约束,τ是一个时隙的长度,c4是移动用户的任务划分参数的限制,c5是移动用户的传输功率限制,pmin和pmax分别是移动用户的最小和最大传输功率,c6是移动用户的传输速率限制,是用户的最小传输速率,c7和c8分别是uav的飞行速度vu(t)和角度θu(t)限制,vmax是uav的最大飞行速度,c9是uav的飞行范围限制,xu(t)和yu(t)分别是uav飞行范围的横坐标和纵坐标,xmax和ymax分别是uav飞行范围最大的横坐标和纵坐标,c10是mec服务器的计算能力限制,f是mec服务器在一个时隙的最大计算能力,p表示所有移动用户在所有时隙下的传输功率,β表示所有移动用户在所有时隙下的任务划分参数,q表示uav在所有时隙下的飞行轨迹,其中qu(t)表示uav的三维坐标,且qu(t)=(xu(t),yu(t),hu),hu表示uav的高度,θ表示irs在所有时隙下的反射系数矩阵。
43、优选地,所述将最小化目标函数转化为对uav的飞行轨迹、移动用户的传输功率和任务划分参数的第一优化,以及对irs的反射系数矩阵的第二优化,包括:
44、对uav的飞行轨迹、移动用户的传输功率和任务划分参数的第一优化时,将irs的反射系数矩阵固定,即得到第一优化问题:
45、
46、s.t.c3-c10;
47、对irs的反射系数矩阵的第二优化时,将uav的飞行轨迹、移动用户的任务划分参数和传输功率固定,即得到第二优化问题:
48、
49、s.t.c1、c2。
50、优选地,所述分别采用ddpg算法和块坐标下降法依次求解第一优化和第二优化的解,最终获得目标函数的最优解,将所述最优解应用在系统中实现能耗优化,包括:
51、求解第一优化的解时,定义ddpg算法的状态空间为s(t)={cu(t);c1(t),...,cn(t);l1(t),...,ln(t)},其中cu(t)和cn(t)分别表示uav和各移动用户的二维平面坐标,定义ddpg算法的动作空间为a(t)={θu(t),vu(t);β1(t),...,βn(t);p1(t),...,pn(t)},定义ddpg算法的奖励函数为其中δpenalty表示不满足约束条件c3、c6、c9、c10的惩罚,通过ddpg算法输出最优的uav的飞行轨迹、移动用户的传输功率和任务划分参数;
52、求解第二优化的解时,对于irs的每一个反射元素:
53、固定除了选定的反射元素以外其余所有元素的相移;
54、取所选定的反射元素的相移所有可能取值,并选择使得p2对应的函数值最小的相移取值,即为最优相移;
55、当irs的所有反射元素都取到最优相移,即得到最优的irs的反射系数矩阵,进而最终获得目标函数的最优解,进而得到系统能耗的最优解。
56、与现有技术相比,本发明的有益效果为:
57、本irs和uav辅助mec系统中的能耗优化方法构建所有移动用户在预设时间段的平均能量消耗的最小化目标函数,并将目标函数的优化问题转化为对uav的飞行轨迹、移动用户的传输功率和任务划分参数的第一优化,以及对irs的反射系数矩阵的第二优化,实现所有移动用户能耗最小的目标;并在优化时,结合深度强化学习的ddpg算法和传统优化方法即块坐标下降法,既发挥了深度强化学习在面对环境的不确定性时能够进行连续动作分配的优势,又利用了传统优化方法得到了反射系数矩阵的解,有利于算法的快速收敛。
- 还没有人留言评论。精彩留言会获得点赞!