基于压缩感知的三维成像方法、装置、设备及存储介质
本技术涉及但不限于压缩感知成像,尤其涉及一种基于压缩感知的三维成像方法、装置、设备及存储介质。
背景技术:
1、三维成像通过获取物体的三维信息,可以更准确地进行测量、分析、建模和可视化,从而帮助解决各种问题和任务,故在许多领域中有广泛的应用。
2、目前,在三维成像时采用压缩超快成像技术可以实现极高的时间分辨率和序列深度,但是传统的三维成像方法的成像效率较低且成像效果较低,亟需一种成像效率较高且成像效果较好的三维成像方法。
技术实现思路
1、以下是对本文详细描述的主题的概述。本概述并非是为了限制权利要求的保护范围。
2、本技术实施例提供了一种基于压缩感知的三维成像方法、装置、设备及存储介质,能够提高成像效率和提高成像效果。
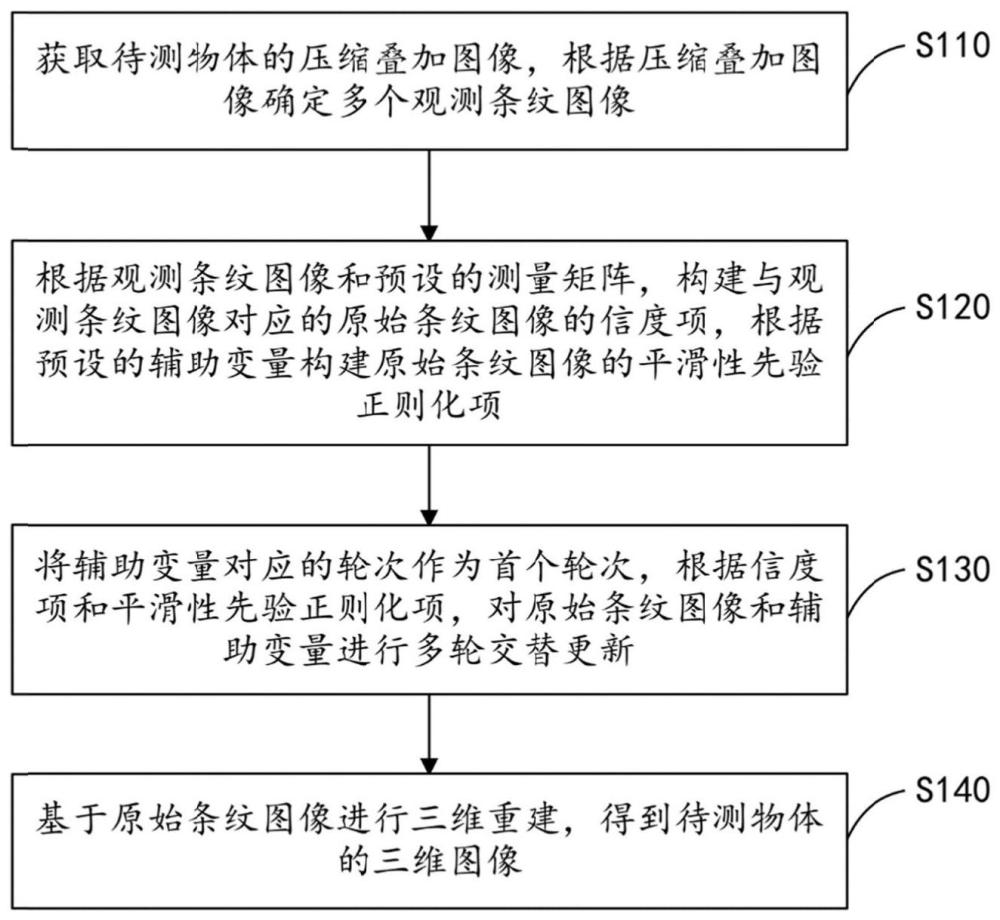
3、为实现上述目的,本技术实施例的第一方面提出了一种基于压缩感知的三维成像方法,包括:获取待测物体的压缩叠加图像,根据所述压缩叠加图像确定多个观测条纹图像;根据所述观测条纹图像和预设的测量矩阵,构建与所述观测条纹图像对应的原始条纹图像的信度项,根据预设的辅助变量构建所述原始条纹图像的平滑性先验正则化项;将所述辅助变量对应的轮次作为首个轮次,根据所述信度项和所述平滑性先验正则化项,对所述原始条纹图像和所述辅助变量进行多轮交替更新,其中,当前轮次的所述原始条纹图像是基于上一轮次的所述辅助变量确定的,当前轮次的所述辅助变量是基于已训练的图像去噪模型对当前轮次的所述原始条纹图像进行去噪得到的;基于所述原始条纹图像进行三维重建,得到所述待测物体的三维图像。
4、在一些实施例中,所述根据所述信度项和所述平滑性先验正则化项,对所述原始条纹图像和所述辅助变量进行多轮交替更新,包括:根据所述信度项和所述平滑性先验正则化项,构建第一优化函数,其中,所述第一优化函数用于确定使所述第一优化函数取最小值时对应的所述原始条纹图像;根据所述第一优化函数确定当前轮次的所述原始条纹图像;将当前轮次的所述原始条纹图像输入所述图像去噪模型,基于所述图像去噪模型对当前轮次的所述原始条纹图像进行去噪处理,得到当前轮次的所述辅助变量;将当前轮次的所述辅助变量对应的轮次更新为上一轮次,根据上一轮次的所述辅助变量更新所述第一优化函数,根据更新后的所述第一优化函数再次确定当前轮次的所述原始条纹图像,直至轮次更新数量等于预设的第一数量阈值。
5、在一些实施例中,所述第一优化函数的计算公式如下:
6、
7、其中,x为所述原始条纹图像,x(t+1)为第t+1个轮次的所述原始条纹图像,y为所述观测条纹图像,a为所述测量矩阵,η为预设的权重控制参数,v(t)为第t个轮次的所述辅助变量,是指计算y-ax的二范数的平方,是指计算x-v(t)的二范数的平方,用于确定使取最小值时对应的所述原始条纹图像;
8、所述图像去噪模型的模型公式如下:
9、
10、其中,v(t+1)为第t+1个轮次的辅助变量,为所述图像去噪模型,x(t+1)为第t+1个轮次的所述原始条纹图像。
11、在一些实施例中,所述根据所述信度项和所述平滑性先验正则化项,对所述原始条纹图像和所述辅助变量进行多轮交替更新之前,所述三维成像方法还包括:根据所述辅助变量构建全变差正则化项;根据所述信度项、所述平滑性先验正则化项和所述全变差正则化项,对所述原始条纹图像和所述辅助变量进行多轮交替更新,其中,当前轮次的所述原始条纹图像是基于上一轮次的所述辅助变量确定的,当前轮次的所述辅助变量是基于所述全变差正则化项对当前轮次的所述原始条纹图像进行去噪得到的。
12、在一些实施例中,所述基于所述原始条纹图像进行三维重建,得到所述待测物体的三维图像,包括:对所述原始条纹图像进行傅里叶变换,得到图像频域数据;对所述图像频域数据进行滤波处理,得到基频分量;对所述基频分量的自然对数的虚部进行相位展开,确定相位差;根据所述相位差确定绝对相位图;基于所述绝对相位图和预设的标定参数进行三维重建,得到所述待测物体的三维图像。
13、在一些实施例中,所述根据所述压缩叠加图像确定多个观测条纹图像,包括:对所述压缩叠加图像进行还原处理,得到多个偏移条纹图像,其中,任意两个偏移条纹图像对应的偏移量是不同的;基于对应的所述偏移量,分别对各个所述偏移条纹图像进行去偏移处理,得到各个偏移条纹图像对应的观测条纹图像。
14、在一些实施例中,任意两个所述观测条纹图像对应的观测时刻是不同的,所述基于所述原始条纹图像进行三维重建,得到所述待测物体的三维图像之后,所述三维成像方法还包括:基于各个所述观测条纹图像对应的所述观测时刻,确定各个所述观测条纹图像对应的所述三维图像的帧时刻;基于所述帧时刻,对各个所述观测条纹图像对应的所述三维图像进行组合,生成所述待测物体的三维视频。
15、本技术实施例的第二方面提出了一种基于压缩感知的三维成像装置,包括:获取模块,用于获取待测物体的压缩叠加图像,根据所述压缩叠加图像确定多个观测条纹图像;构建模块,用于根据所述观测条纹图像和预设的测量矩阵,构建与所述观测条纹图像对应的原始条纹图像的信度项,根据预设的辅助变量构建所述原始条纹图像的平滑性先验正则化项;处理模块,用于将所述辅助变量对应的轮次作为首个轮次,根据所述信度项和所述平滑性先验正则化项,对所述原始条纹图像和所述辅助变量进行多轮交替更新,其中,当前轮次的所述原始条纹图像是基于上一轮次的所述辅助变量确定的,当前轮次的所述辅助变量是基于已训练的图像去噪模型对当前轮次的所述原始条纹图像进行去噪得到的;重建模块,用于基于所述原始条纹图像进行三维重建,得到所述待测物体的三维图像。
16、为实现上述目的,本技术实施例的第三方面提出了一种电子设备,所述电子设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述第一方面所述的基于压缩感知的三维成像方法。
17、为实现上述目的,本技术实施例的第四方面提出了一种存储介质,所述存储介质为计算机可读存储介质,所述存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述第一方面所述的基于压缩感知的三维成像方法。
18、本技术实施例至少包括以下有益效果:通过获取压缩叠加图像,由于压缩叠加图像是条纹相机基于压缩超快成像技术生成的,所以能够根据压缩叠加图像确定多个观测条纹图像,实现一次性获取多帧图像,然后构建信度项和平滑性先验正则化项,然后根据信度项和平滑性先验正则化项,通过交替更新原始条纹图像和辅助变量,确定与观测条纹图像对应的原始条纹图像,在交替更新过程中,具体需要基于上一轮次的辅助变量确定当前轮次的原始条纹图像,相当于对信度项和平滑性先验正则化项中的辅助变量进行固定后更新原始条纹图像,以及基于已训练的图像去噪模型对当前轮次的原始条纹图像进行去噪得到当前轮次的辅助变量,相当于对输入图像去噪模型的原始条纹图像进行固定后更新辅助变量,然后基于多轮交替更新后确定的原始条纹图像进行三维重建,能够确定待测物体的三维图像,多个观测条纹图像对应的三维图像构成超快三维图像序列;由于图像去噪模型的去噪效率高且去噪效果好,通过在原始条纹图像和辅助变量的多轮更新的框架中结合图像去噪模型,能够有效提升计算速度和有效提升超快三维图像序列的重构质量,因此,本技术实施例提供的基于压缩感知的三维成像方法能够提高成像效率和提高成像效果。
19、本技术的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本技术而了解。本技术的目的和其他优点可通过在说明书、权利要求书以及附图中所特别指出的结构来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!