一种满足多目标约束的纯电动车前端结构刚度的设计方法
本发明涉及纯电动车结构设计领域,尤其涉及一种可以满足多目标约束需求的纯电动车前端结构的刚度设计方法。
背景技术:
1、近年来纯电动车发展迅速,但是车体结构还是主要沿用传统汽车的结构设计,采用在局部区域做结构改进的方式满足车辆在各工况的安全性要求。由于纯电动车的电池包主要布置在地板位置,不仅增大了整车正面碰撞总能量,还影响了地板横、纵梁的布置,使得纯电动车正面碰撞力的传递路径明显区别于传统燃油车。此外,为了避免电池包在碰撞过程中受到挤压起火,纯电动车前端吸能结构在吸能量相较于传统车增大的同时,对其变形的要求也更严苛。这是纯电动车相较于传统车正面碰撞安全性设计的挑战,需要从电动车的角度出发考虑其前端结构的设计。
2、碰撞波形是车体在正面碰撞过程中的减速度历程,体现了前端结构吸能特性。而从车辆碰撞力学的角度出发,位移域的碰撞波形可以转化为结构的比刚度(即单位质量的刚度),往往在整车安全性开发过程中作为车体前端结构的刚度设计目标。整车耐撞性设计的第一步就是优化碰撞波形,获得合理的前端结构刚度,再对其进行详细设计(包括结构材料、形貌和断面参数等)。对纯电动车来说,电机的布置位置更灵活,前舱吸能空间增大,在结构刚度设计上更多可能性。
3、在2020年以前,车辆前端结构刚度设计主要针对frb工况进行。2020年和2021年的euro-ncap和c-ncap中引入了mpdb碰撞工况,该工况考察车辆兼容性,要求车辆在保护车内乘员安全的同时还要保护对车乘员安全,对车体前端结构的设计提出较高要求。这使得车体前端结构刚度设计需要兼顾多工况碰撞性能的需求,增加了设计难度。
4、纯电动车前端结构刚度设计需要满足车内乘员安全性、电池包安全性和车辆兼容性三方面性能。因此提出满足多工况性能目标约束的纯电动车前端结构刚度设计方法,在车辆安全性开发早期利用总布置参数获得前端吸能结构的设计目标,对提高纯电动车正面碰撞安全性具有重要意义。
技术实现思路
1、本发明设计一种满足多目标约束的纯电动车前端结构刚度的设计方法,用于解决满足多目标约束的纯电动车前端结构刚度的设计问题:
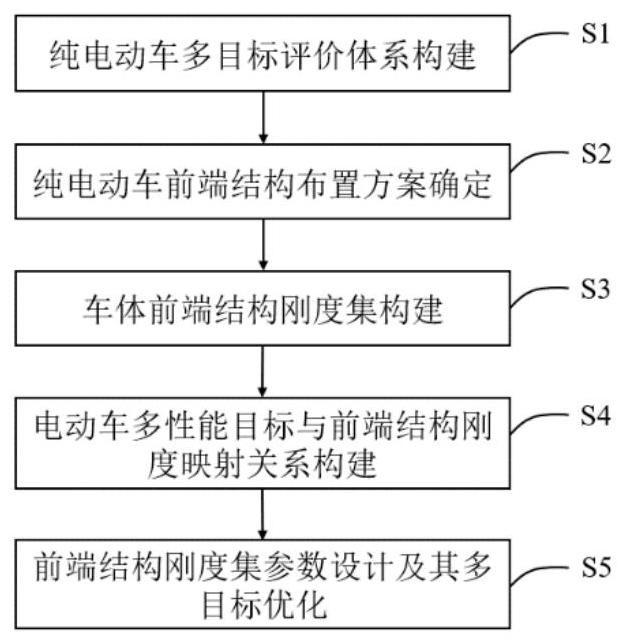
2、s1:纯电动车多目标评价体系构建
3、1)电池包安全性指标
4、根据电动汽车动力蓄电池安全要求,电池包需满足模拟碰撞冲击脉冲击下的安全性,即电池包可以确保在不超过28g,持续时间小于30ms的碰撞冲击下的安全性;因此,在设计纯电动车碰撞波形时,要求碰撞波形不能有持续30ms以上的大于28g的波形段;此外,还需要确保在碰撞过程中电池包结构不发生变形;
5、2)车辆碰撞安全性指标
6、车辆安全性要求车辆前端结构可以在正面碰撞过程中保护车内乘员安全性;以车辆olc值作为车辆安全性评价目标;
7、3)车辆碰撞兼容性指标
8、在mpdb工况中,车辆碰撞兼容性主要通过壁障olc值、壁障触底惩罚md和壁障变形均匀性sd三个指标来评价;其中,壁障的olc值由壁障在碰撞过程中的速度变化计算,壁障的触底惩罚与变形均匀性与车辆和壁障的相对变形情况相关;
9、s2:纯电动车前端结构布置方案确定
10、1)电机、电池包位置确定
11、分别定义电机沿车身坐标系xyz轴方向的纯电动车前端总设计域的尺寸为长l、宽b、高h;其中l为车体前端到a柱下端的水平距离,b为整车宽度,h为发动机罩与挡风玻璃连接处与车辆地板的距离,则车辆前端总设计域为l×b×h;
12、纯电动车电机、电池包在碰撞过程中不发生变形,视为刚性结构,因此需要在车体前端结构设计之前确定电机和电池包的布置位置;电机布置位置根据驱动方案的不同可以放置在前舱的中间、后方或者与驱动桥集成放置在车辆前轴与后轴位置;分别定义电机沿车身坐标系xyz轴方向的尺寸为长l、宽b、高h,则电机占用的前舱空间为l×b×h;
13、电池包通常布置在地板和座椅下方;针对布置在地板的电池包,需要在评价指标中增加电池包变形量de,其计算方法如下式1所示:
14、de=(l-l)·(1+5%)-max{d2(i)} (1)
15、2)前端主要吸能结构布置方案确定
16、定义纯电动车有效吸能空间为车辆前舱纵向空间与电机纵向空间的差;定义前舱吸能结构防撞梁、吸能盒、纵梁、前指梁、附车架和发动机罩等的布置位置及各零部件所占用的空间,即sab、seb、sag、ssf、ssg、seg。
17、s3:车体前端结构刚度集构建
18、1)结构元刚度定义
19、假设每个结构的刚度值均匀分配给该结构所占空间,则定义车辆结构在单位空间的吸能刚度为车辆各吸能结构元刚度kpij;同理定义单位吸能空间内mpdb壁障的元刚度为kbij,其中p为零部件编号,b代表壁障,i为x方向的单位空间个数,j为yz平面的单位空间个数;
20、2)刚度集计算模式定义
21、车辆在纵向的结构刚度可以看做各结构元刚度在yz平面内刚度的并联,因此车辆总刚度的计算式如下式2所示:
22、
23、定义其壁障在纵向的总刚度可以视为元刚度在yz平面内刚度的并联,其刚度的计算模式如下式3所示:
24、
25、在碰撞过程中,车辆在与壁障接触时车辆刚度与壁障刚度先在x方向串联,再在yz平面内并联,车辆与壁障之间等效刚度的计算方式如下式4所示:
26、
27、s4:电动车多性能目标与前端结构刚度映射关系构建
28、1)车辆与壁障动态响应计算
29、纯电动车与壁障的碰撞过程可以等效为两个带有弹簧的质量块串联,则系统的振动方程和振动响应可由式5~8表示:
30、
31、
32、
33、
34、壁障和车辆在碰撞过程中做协同振动,振动频率相同,但是振动幅值不同。壁障和车辆的振动响应分别如下式9~10所示:
35、
36、
37、2)车辆吸能量计算
38、纯电动车在碰撞过程中需要满足frb工况的吸能量需求,即车辆刚度在位移域的积分应满足如下式11所示:
39、
40、3)评价指标计算
41、车辆与壁障olc计算过程如下式12所示:
42、
43、电池包安全性指标计算如下式13所示:
44、t=countif(a2(i),"≥28g") (13)
45、电池包变形指标计算如下式14所示:
46、de=(l-l)·(1+5%)-max{d2(i)} (14)
47、壁障触底指标计算如下式15所示:
48、md=db-max{d2(i)} (15)
49、壁障变形均匀性指标计算过程如下式16所示:
50、
51、s5:前端结构刚度集参数设计及其多目标优化
52、1)优化约束条件定义
53、由于车辆兼容性评价属于罚分制考查工况,因此将该工况的评价指标壁障olc值、壁障触底指标md和壁障变形均匀性指标sd设为约束;
54、根据s4中所计算的各类指标,以车辆olc为优化目标,以电池包安全性指标t、变形指标de、壁障olc、壁障触底指标md和壁障变形均匀性指标sd为约束条件,建立纯电动车前端结构刚度参数优化方法;
55、2)多目标优化理论模型构建
56、本发明融合遗传算法与上述前端结构刚度集建立和计算方法,制定优化方法,按如下步骤进行:
57、s501:设置系统参数:m1,m2,b,l,h,b,l,h,v0,v1,v2,kb;
58、s502:设置吸能结构空间参数:sab,seb,sag,ssf,ssg,sec;
59、s503:计算壁障元刚度kbij;
60、s504:设置结构元刚度kbij搜索范围(b1,b2);
61、s505:生成初始种群;
62、s506:计算纯电动车与壁障等效刚度kei;
63、s507:计算系统固有频率ω;
64、s508:计算纯电动车与壁障振动响应:a1(i),a2(i),v1(i),v2(i),d1(i),d2(i);
65、s509:判断:车辆吸能量目标e是否大于等于1/2v02;如果是,则继续进行s19;如果否,则回到s15重新优化;
66、s510:判断:电池包安全性指标t是否小于30ms;如果是,则继续进行s20;如果否,则回到s15重新优化;
67、s511:判断:电池包变形量de是否大于0;如果是,则继续进行s21;如果否,则回到s15重新优化;
68、s512:判断:壁障值olc是否小于28g;如果是,则继续进行s22;如果否,则回到s15重新优化;
69、s513:判断:壁障触底指标md是否大于0;如果是,则继续进行s23;如果否,则回到s15重新优化;
70、s514:判断:壁障变形均匀性指标sd是否小于50mm;如果是,则继续进行s24;如果否,则回到s15重新优化;
71、s515:计算纯电动车前端结构刚度;
72、s516:计算车辆olc值;
73、s517:判断:迭代是否对达到最大次数;如果是,则继续进行s27;如果否,则回到s14重新优化;
74、s518:输出优化目标车辆olc值,约束目标约束目标e、t、de、壁障olc、md、sd,以及优化后的纯电动车前端结构刚度组合。
75、进一步地,电动汽车前置电机宽度l对应着车身纵向不可变形区域,所以电动汽车设计域中可变形的宽度为l-l;
76、进一步地,式(1)中5%是定义的压缩余量,max{d2(i)}表示车辆最大变形量;
77、进一步地,电池包变形指标de>0则代表电池包在碰撞过程中未发生变形;
78、进一步地,为了方便描述只列举了几种前舱吸能结构,还可以有其他不同的吸能结构;
79、进一步地,式(5)中m1、m2分别为壁障和车辆的质量;
80、进一步地,式(8)中ω表示振动频率,c表示振幅;
81、进一步地,车辆与壁障碰撞过程的初始条件为:f(0)=0,带入式(5)~(8)可得
82、进一步地,式(9)和(10)中,d1和d2分别为壁障和车辆的位移,a1和a2分别为壁障和车辆的加速度,v1和v2分别为壁障和车辆的速度;
83、进一步地,纯电动车在碰撞过程中需要满足frb工况的吸能量需求,即
84、
85、进一步地,电池包安全性指t应该满小于30ms,即t<30ms;
86、进一步地,车辆olc值代表电动车碰撞波形的剧烈程度,olc越小代表乘员安全性越好;
87、进一步地,式(15)中,db表示避障的原始长度;
88、进一步地,根据车辆兼容性罚分计算方式可得,当其中三个指标同时满足olc<25g、md>0、sd<50mm时,该工况可获得满分;
89、本发明具有以下有益效果:本发明提出的纯电动车前端结构刚度设计方法,可以在车辆概念设计阶段,利用整车质量、电机和电池包布置位置,以及防撞梁、吸能盒和纵梁等结构的布置空间等较少的参数进行满足frb和mpdb两个工况多个目标约束的纯电动车前端结构刚度设计。本文提出的设计方法,其设计过程不依赖大型软件,利用简单算法即可快速获得纯电动车前端结构的刚度设计参数,避免有限元仿真的反复试错过程,节省纯电动车安全性开发过程的人力物力。
- 还没有人留言评论。精彩留言会获得点赞!